TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025002795
公報種別
公開特許公報(A)
公開日
2025-01-09
出願番号
2023103151
出願日
2023-06-23
発明の名称
調査システム
出願人
日立GEニュークリア・エナジー株式会社
代理人
ポレール弁理士法人
主分類
G05D
1/46 20240101AFI20241226BHJP(制御;調整)
要約
【課題】非GPS環境下かつ、特徴点の無い、または、同じパターンを繰返す床面上においても飛行体のホバリング精度を向上させる方法を提供する。
【解決手段】非GPS環境下で飛行体を飛行させて環境調査を行うための調査システムであって、本体に備えた下方カメラにより得た撮像画像の情報を用いて飛行制御する飛行体と、ケーブルをけん引可能として地上面を走行する移動体とを備え、ケーブルには、マーカが付与されており、飛行体は、下方カメラにより得た撮像画像のマーカを特徴点として用いて飛行制御することを特徴とする調査システム。
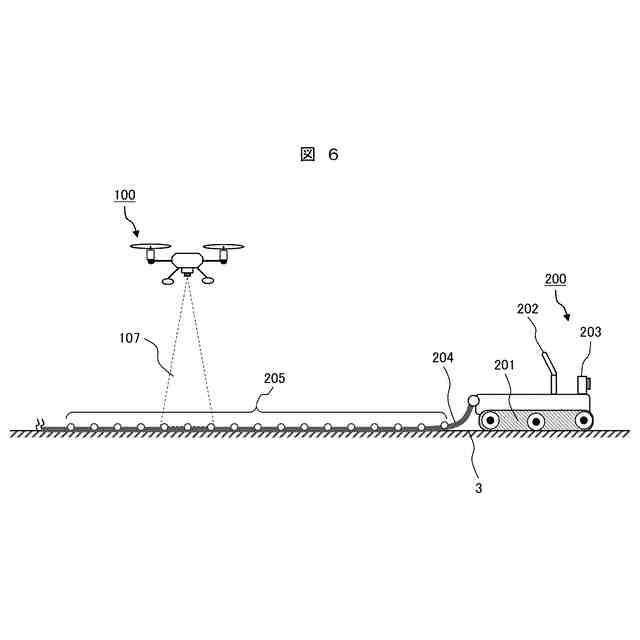
【選択図】図6
特許請求の範囲
【請求項1】
非GPS環境下で飛行体を飛行させて環境調査を行うための調査システムであって、
本体に備えた下方カメラにより得た撮像画像の情報を用いて飛行制御する飛行体と、ケーブルをけん引可能として地上面を走行する移動体とを備え、
前記ケーブルには、マーカが付与されており、前記飛行体は、前記下方カメラにより得た撮像画像の前記マーカを特徴点として用いて飛行制御することを特徴とする調査システム。
続きを表示(約 1,000 文字)
【請求項2】
請求項1に記載の調査システムであって、
前記マーカは、前記移動体のケーブル表面に取り付けられた、特徴のある模様、或いは、複数のLEDライトであることを特徴とする調査システム。
【請求項3】
請求項1に記載の調査システムであって、
前記飛行体は、前記マーカから前記ケーブルの上端下端の向きを識別することを特徴とする調査システム。
【請求項4】
請求項1に記載の調査システムであって、
前記飛行体は、前記マーカから前記ケーブルの長さを識別することを特徴とする調査システム。
【請求項5】
請求項1に記載の調査システムであって、
飛行体を飛行させて環境調査を行うに先立ち、前記移動体が前記ケーブルを地上面に敷設させ、前記移動体のケーブルを後発の前記飛行体の移動経路指標として活用することを特徴とする調査システム。
【請求項6】
請求項1に記載の調査システムであって、
前記飛行体は、前記移動体によって敷設されたケーブルをライントレースして自律飛行する制御機能を備えることを特徴とする調査システム。
【請求項7】
請求項1に記載の調査システムであって、
前記飛行体の下方カメラは赤外線カメラであって、
前記ケーブルの表面に取り付けられたLEDライトの熱源を特徴点として利用することを特徴とする調査システム。
【請求項8】
請求項1に記載の調査システムであって、
前記飛行体は、前記下方カメラにより得た撮像画像の前記マーカを特徴点として前記飛行体の水平移動量を算出し、前記飛行体のホバリング制御に活用することを特徴とする調査システム。
【請求項9】
請求項1に記載の調査システムであって、
前記移動体は、電力線と制御信号線を含む前記ケーブルを介して基地局に接続されて、電力を供給されかつ遠隔制御されて走行することを特徴とする調査システム。
【請求項10】
請求項9に記載の調査システムであって、
前記移動体と前記飛行体は、通信部を介して互いに通信が可能とされ、前記飛行体は前記ケーブルと前記通信部を介して前記基地局から遠隔制御されて飛行することを特徴とする調査システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、飛行体と移動体を用いた調査システムに関するものである。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
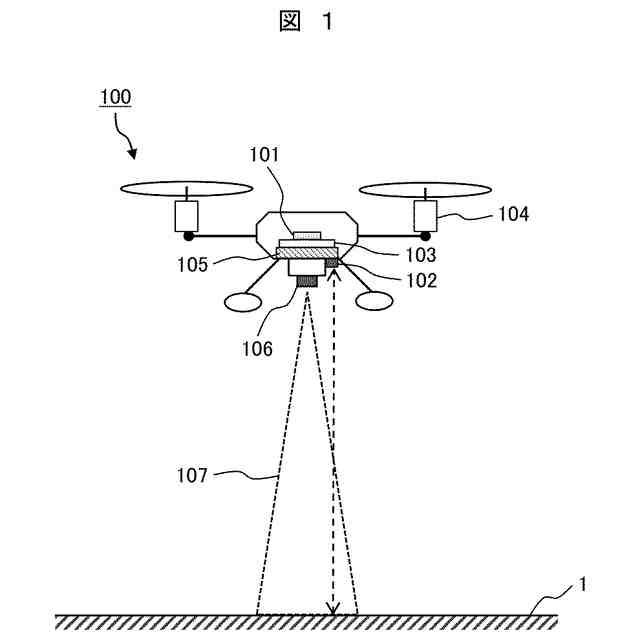
危険リスクの高い箇所の点検や調査作業の代替及び作業効率化を目的に、無人飛行体を活用した点検/調査方法がある。GPS位置情報が利用できる屋外のような環境では、比較的容易に飛行体を空中でホバリング、すなわち、その場(水平位置と高度)で留まらせる飛行制御が可能である。一方で、建屋内、トンネル、共同溝、下水管路等の非GPS環境下で、飛行体を安定してホバリングさせるためには、飛行体自身の移動ズレ量を検出し、位置制御系にフィードバックさせる必要がある。飛行体の移動ズレ量を検出する従来技術としては、地面或いは床面をカメラで撮像し、取得した画像の特徴点から、移動ズレ量を検出するオプティカルフロー技術が知られている。
【0003】
例えば、特許文献1に記載されているような技術が開示されている。これは、飛行推進部と処理部とを備える飛行装置であって、地面又は床面の方向の画像を撮影する下向き撮影部と、前記飛行装置の少なくとも姿勢又は、地面若しくは床面に対する高度を検出するフライトセンサ部と、を備え、前記処理部は、前記フライトセンサ部が検出した前記飛行装置の姿勢又は高度に応じて、前記撮影部が撮影した前記画像に対してトリミング処理又は縮小処理を実行し、前記トリミング処理又は縮小処理の後の前記画像から前記飛行装置の水平移動量を算出する、ことを特徴としている。
【先行技術文献】
【特許文献】
【0004】
特開2019-114008号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
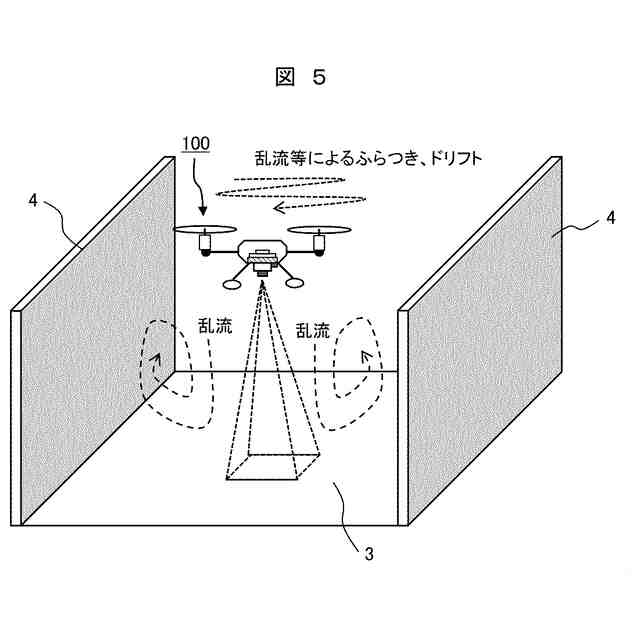
しかしながら、従来技術では、特徴量のある地面や床面上で飛行体を飛行させることを前提としていた。そのため、非GPS環境下かつ、特徴点の無い、または、同じパターンを繰返す床面上では、オプティカルフロー技術で、飛行体の移動ズレ量を検出することが困難であり、飛行体のホバリング精度を向上させられないことが課題であった。
【0006】
本発明は、上記の問題点を考慮し、非GPS環境下かつ、特徴点の無い、または、同じパターンを繰返す床面上においても飛行体のホバリング精度を向上させる方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
以上のことから本発明においては、「非GPS環境下で飛行体を飛行させて環境調査を行うための調査システムであって、本体に備えた下方カメラにより得た撮像画像の情報を用いて飛行制御する飛行体と、ケーブルをけん引可能として地上面を走行する移動体とを備え、ケーブルには、マーカが付与されており、飛行体は、下方カメラにより得た撮像画像のマーカを特徴点として用いて飛行制御することを特徴とする調査システム。」としたものである。
【発明の効果】
【0008】
上記構成の飛行体と移動体を用いた屋内調査システムによれば、非GPS環境下かつ、特徴点の無い、または、同じパターンを繰返す床面上においても飛行体のホバリング精度を向上させることが可能となる。上記した以外の課題、構成及び効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
【0009】
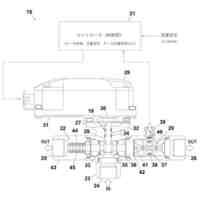
飛行体100の概略構成例を示す図。
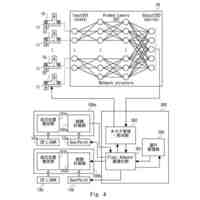
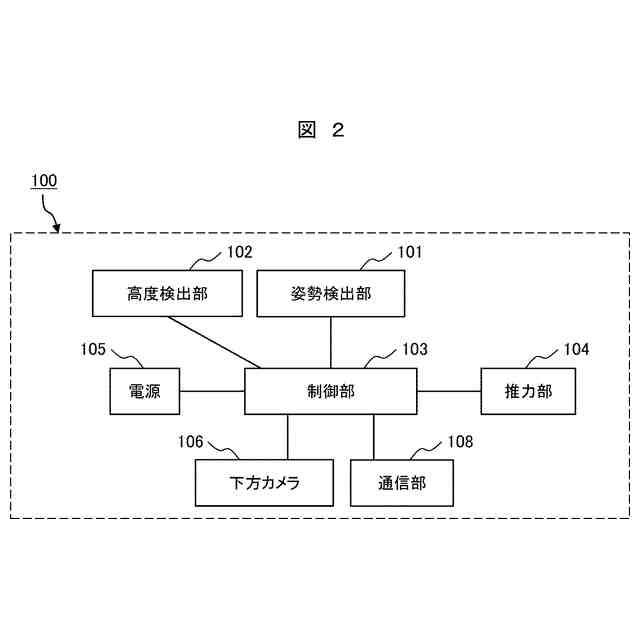
飛行体100のシステム構成例を示す図。
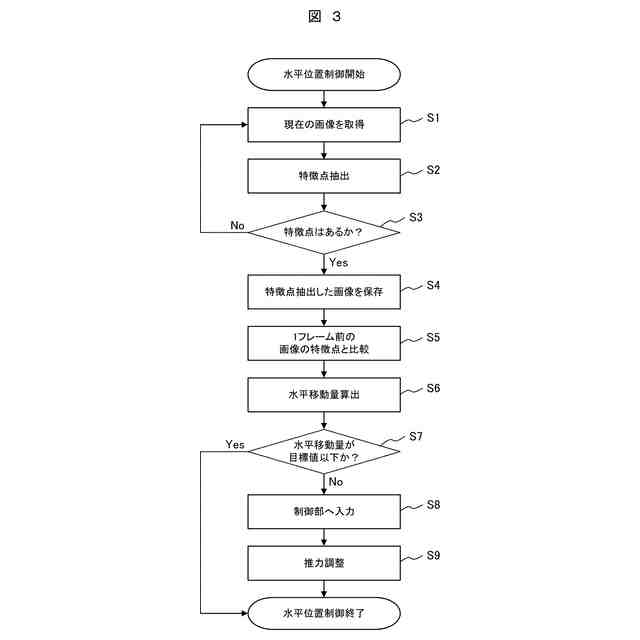
飛行体100の水平位置制御(オプティカルフロー制御)の流れを示すフローチャート。
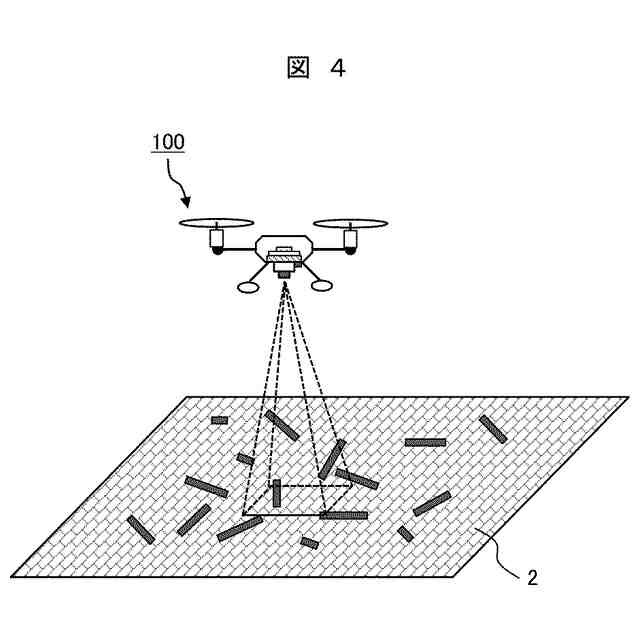
特徴点のある床2の上を飛行する飛行体の様子を示す図。
特徴点の無い床3の上を飛行する飛行体の様子を示す図。
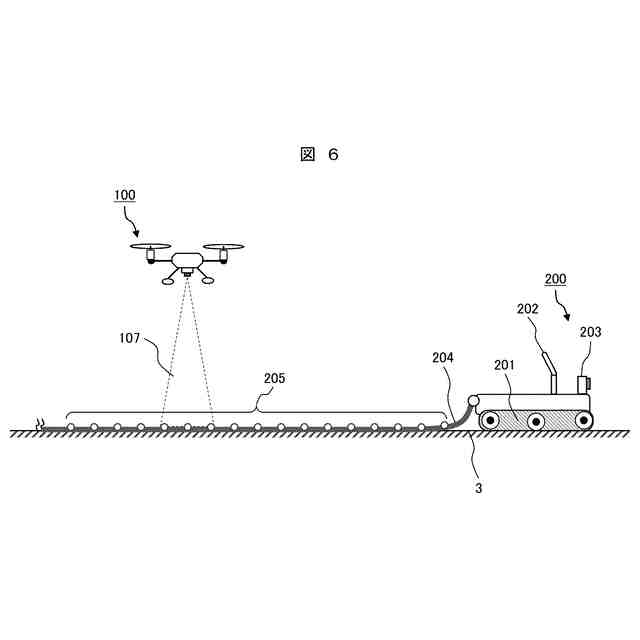
実施例1に係る飛行体100と移動体200を用いた調査システムの概略構成例を示す図。
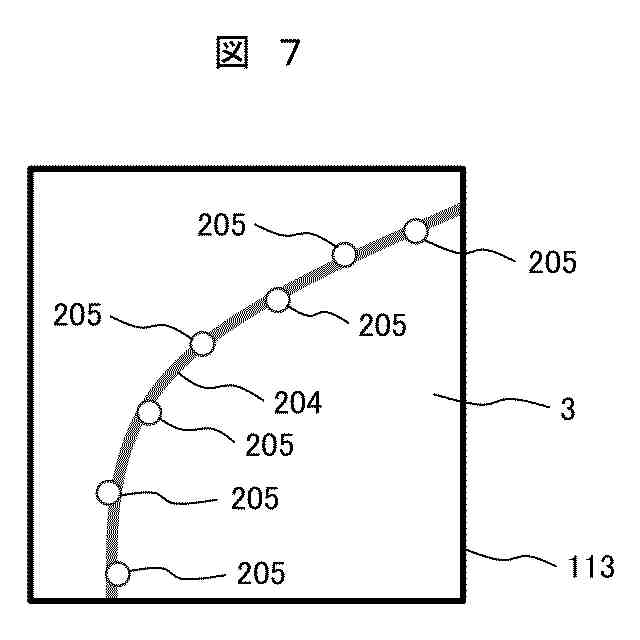
飛行体100がケーブル204の直上を飛行した際に、飛行体100の下方カメラ106が撮像した画像の一例を示す図。
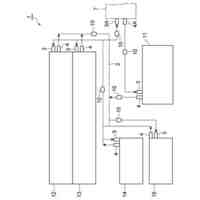
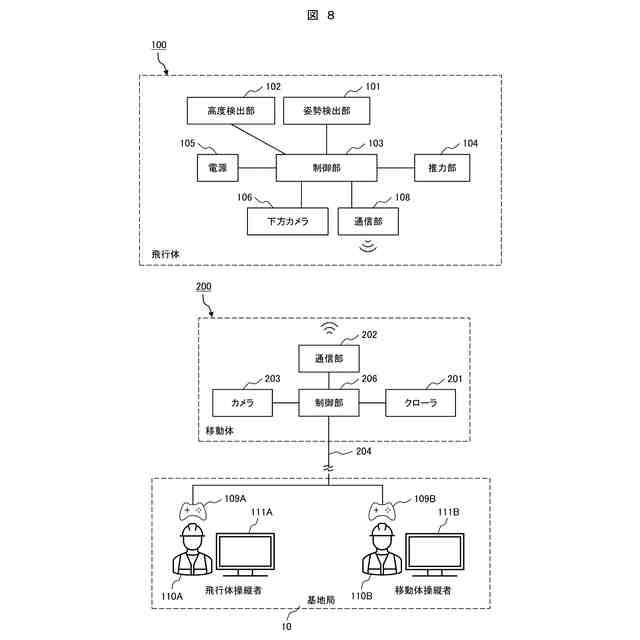
実施例1に係る調査システムの構成図。
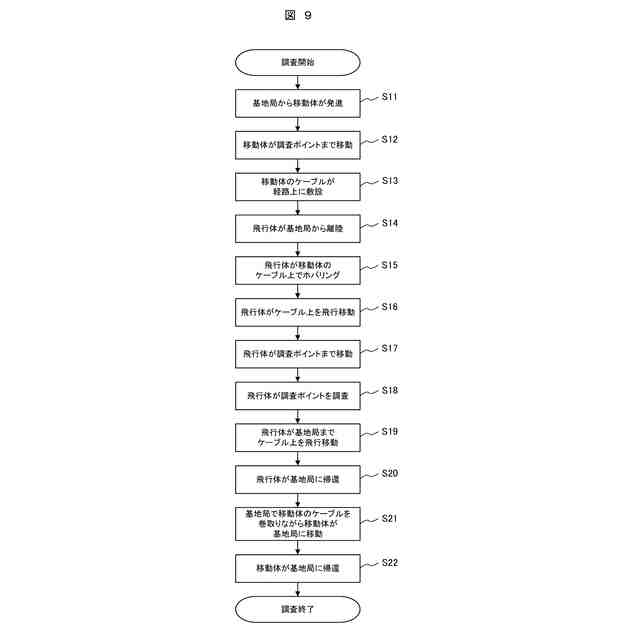
実施例1に係る調査システムの調査手順を示したフローチャート。
実施例2に記載の色の異なるマーカ210を取り付けたケーブル204を示す図。
実施例3に記載の距離情報を付加したマーカ211付きケーブル204を示す図。
実施例4に記載の移動体200が水中或いは水面上を移動可能な形態の場合の調査システムの構成例を示す図。
【発明を実施するための形態】
【0010】
以下、本飛行体と移動体を用いた屋内調査システムを図に基づいて説明する。なお、各図において、同一の構成には同一の符号を付し、説明が重複する場合は、その説明を省略する場合がある。また、本発明の各種の構成要素は必ずしも個々に独立した存在である必要はなく、一の構成要素が複数の部品から成ること、複数の構成要素が一の部品から成ること、或る構成要素が別の構成要素の一部であること、或る構成要素の一部と他の構成要素の一部とが重複すること、等を許容する。
【実施例】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
方向検出器
2か月前
ugo株式会社
移動体
2か月前
個人
無人作業システム
3日前
村田機械株式会社
産業機械
17日前
株式会社ダイヘン
移動体
2か月前
神港テクノス株式会社
制御装置
2か月前
株式会社ダイヘン
移動体
2か月前
トヨタ自動車株式会社
自律移動体
2か月前
トヨタ自動車株式会社
自律移動体
17日前
トヨタ自動車株式会社
搬送ロボット
2か月前
トヨタ自動車株式会社
配送システム
1か月前
株式会社クボタ
作業車
17日前
アズビル株式会社
パラメータ調整装置
26日前
株式会社明電舎
車両
17日前
株式会社フジキン
流体制御装置
1か月前
株式会社ダイフク
搬送設備
2か月前
トヨタ自動車株式会社
ロボットシステム
25日前
株式会社ダイフク
搬送設備
4日前
トヨタ自動車株式会社
ロボットシステム
17日前
トヨタ自動車株式会社
位置推定システム
2か月前
株式会社村田製作所
温度補償回路
3日前
トヨタ自動車株式会社
自律移動システム
2か月前
株式会社栗本鐵工所
操作装置
2か月前
株式会社FUJI
工作機械の操作システム
2か月前
ローム株式会社
電源回路
1か月前
株式会社ダイフク
物品搬送設備
10日前
株式会社ダイフク
物品搬送設備
2か月前
キヤノン株式会社
情報処理装置
25日前
株式会社ダイフク
物品搬送設備
4日前
ローム株式会社
電源回路
1か月前
株式会社ダイフク
物品搬送設備
4日前
旭精機工業株式会社
監視データ処理装置
11日前
村田機械株式会社
搬送車システム
2か月前
東フロコーポレーション株式会社
流量制御装置
1か月前
CKD日機電装株式会社
モデルフリーポジカスト制御
2か月前
トヨタ自動車株式会社
群制御システム及び方法
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ