TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024180656
公報種別
公開特許公報(A)
公開日
2024-12-26
出願番号
2024184223,2020059712
出願日
2024-10-18,2020-03-30
発明の名称
データ処理装置
出願人
パイオニア株式会社
,
パイオニアスマートセンシングイノベーションズ株式会社
,
パイオニアシステムテクノロジー株式会社
代理人
個人
,
個人
,
個人
主分類
G01S
7/487 20060101AFI20241219BHJP(測定;試験)
要約
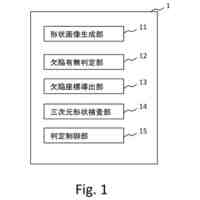
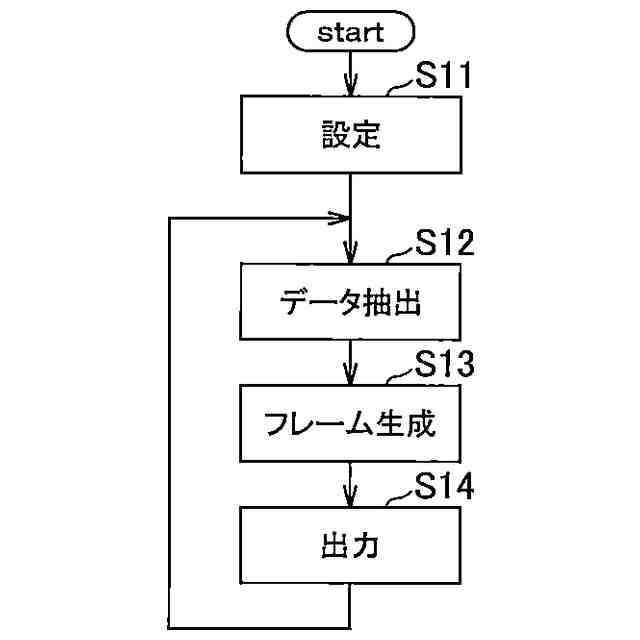
【課題】出力先に応じて柔軟にデータ構成を変更できる。
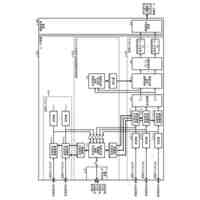
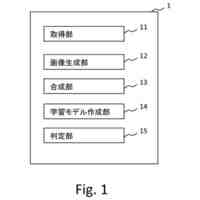
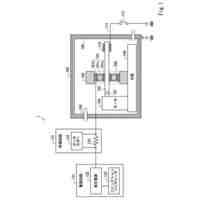
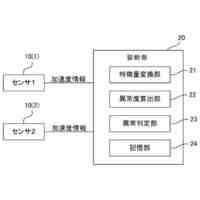
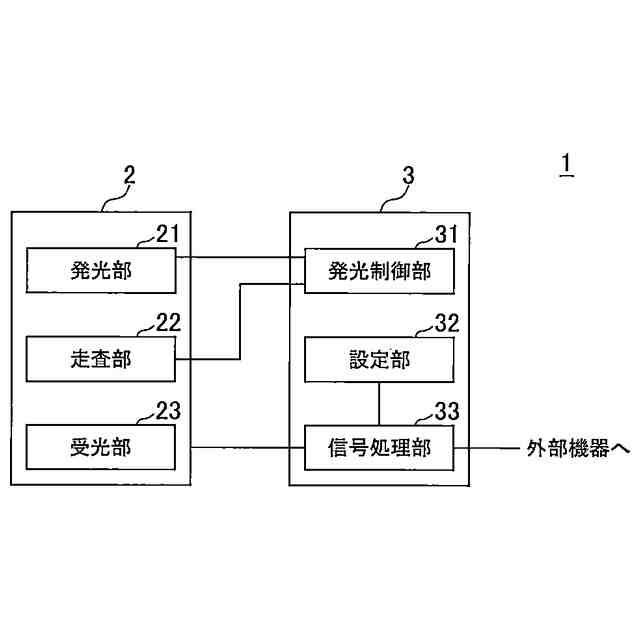
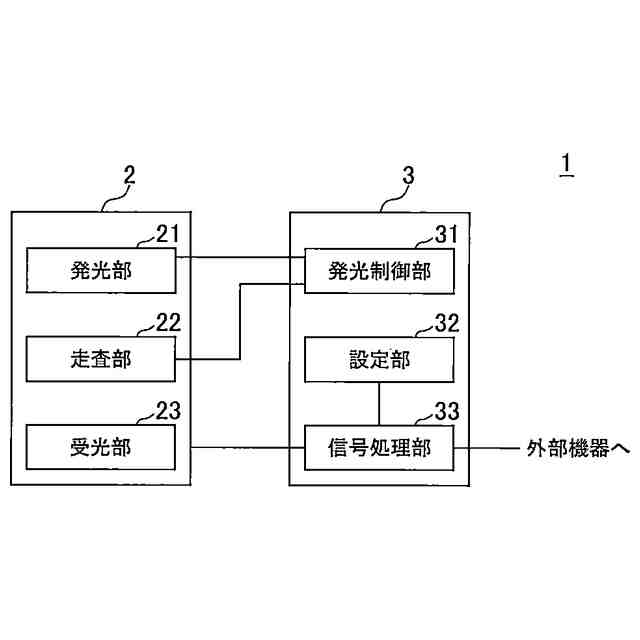
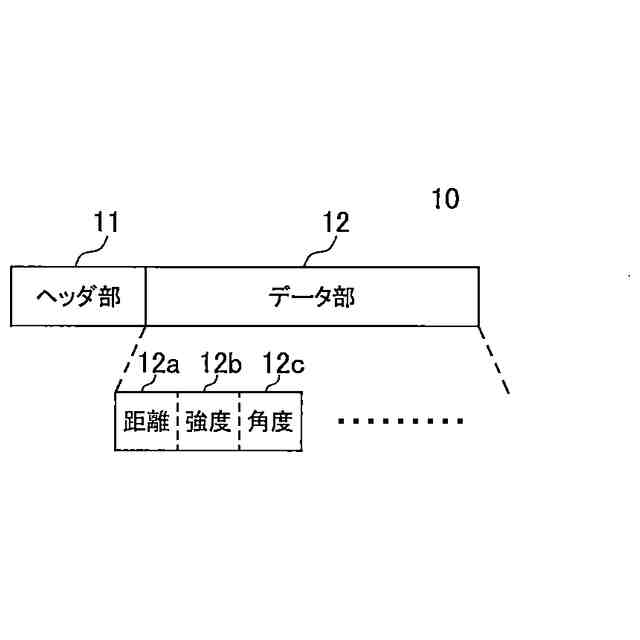
【解決手段】信号処理部33が、出射光に対する反射光に関する複数の項目を含む測定データを取得し、設定部32には、取得した測定データを出力する際の通信フレームのデータ構成が設定される。そして、信号処理部33が、設定部32の設定に基づくデータ構成で通信フレームを出力する。
【選択図】図1
特許請求の範囲
【請求項1】
1つの出射光が反射して生成される複数の反射光に関する複数の項目を含む測定データを取得する取得部と、
前記取得部が取得した前記測定データのうち、マルチエコーを示す複数の受光データについての複数の抽出条件から少なくとも一つの抽出条件を設定し、さらに、取得した前記測定データのうち出力する際の通信データとして必要なデータによるデータ構成を任意に設定可能な設定部と、
設定された前記抽出条件により抽出された前記受光データを含む前記通信データを、設定された前記データ構成で出力する出力部と、
を備えることを特徴とするデータ処理装置。
続きを表示(約 920 文字)
【請求項2】
前記抽出条件は、前記受光データに含まれる受光強度に基づくものであることを特徴とする請求項1に記載のデータ処理装置。
【請求項3】
前記抽出条件は、前記受光データに含まれる対象物までの距離に基づくものであることを特徴とする請求項1に記載のデータ処理装置。
【請求項4】
前記取得部が取得した前記受光データのS/N比を算出するS/N比算出部をさらに備え、
前記出力部が出力する受光データに前記S/N比を含める場合は、前記抽出条件が、前記S/N比に基づいて設定されていることを特徴とする請求項1に記載のデータ処理装置。
【請求項5】
前記取得部が取得した前記受光データの信頼度を算出する信頼度算出部をさらに備え、
前記出力部が出力する受光データに前記信頼度を含める場合は、前記抽出条件が前記信頼度に基づいて設定されていることを特徴とする請求項1に記載のデータ処理装置。
【請求項6】
前記抽出条件は、前記複数の受光データから抽出するデータの個数に基づくものであることを特徴とする請求項1から5のうちいずれか一項に記載のデータ処理装置。
【請求項7】
前記設定部では、前記通信データを構成する項目の並び順が設定されることを特徴とする請求項1に記載のデータ処理装置。
【請求項8】
前記設定部では、取得した前記測定データに含まれる前記項目のうち、前記通信データに含める前記項目が設定されることを特徴とする請求項1に記載のデータ処理装置。
【請求項9】
前記設定部は、外部から前記データ構成に関する情報を取得し、
前記出力部は、取得した前記データ構成に関する情報に基づくデータ構成で前記通信データを出力する、
ことを特徴とする請求項1に記載のデータ処理装置。
【請求項10】
前記取得部は、前記設定部に設定された前記データ構成に沿って、前記測定データのうち、必要なデータを取得することを特徴とする請求項1に記載のデータ処理装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
出射光に対する反射光に関する複数の項目を含む測定データに対して所定の処理を行うデータ処理方法に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
LiDAR(Light Detection and Ranging)等の光を利用して対象物との距離等を測定するセンサが知られている。この種のセンサにおいては、1回に照射されるレーザ光が複数の物体にて反射されると、それぞれの物体を示す複数の信号(複数のエコー)が検出される場合がある(マルチエコーともいう)。
【0003】
このようなマルチエコーによってノイズとなる信号を除去する技術として、例えば特許文献1に記載の発明がある。特許文献1には、複数の測距点のうちの判定対象とする複数の対象測距点のそれぞれについて、対象測距点が示す距離と、対象測距点に近接する照射領域における複数の測距点である複数の近接測距点のそれぞれが示す距離との連続性が低いほど、対象測距点がノイズ点である可能性を高く評価し、複数の測距点からノイズ点である可能性が評価閾値よりも高く評価されたノイズ点を除去することが記載されている。
【先行技術文献】
【特許文献】
【0004】
特開2019-105654号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
今後、LiDARは様々なシステムに接続される可能性がある。したがって、LiDARは様々なシステムに合わせたデータ構成で出力することが求められる。そのため、例えば開発時に個別に対応するデータ構成を特定してしまうと、後の変更が困難となる。一方で、予め多くのデータ構成に対応させると使用されない部分が無駄になってしまう。
【0006】
特許文献1は、ノイズ等の不要なデータを削除するという観点でデータ量を削減ものであり、出力先に応じたデータ構成に対応させることはできない。
【0007】
本発明が解決しようとする課題としては、出力先に応じて柔軟にデータ構成を変更できることが一例として挙げられる。
【課題を解決するための手段】
【0008】
上記課題を解決するために、請求項1に記載の発明は、1つの出射光が反射して生成される複数の反射光に関する複数の項目を含む測定データを取得する取得部と、前記取得部が取得した前記測定データのうち、マルチエコーを示す複数の受光データについての複数の抽出条件から少なくとも一つの抽出条件を設定し、さらに、取得した前記測定データのうち出力する際の通信データとして必要なデータによるデータ構成を任意に設定可能な設定部と、設定された前記抽出条件により抽出された前記受光データを含む前記通信データを、設定された前記データ構成で出力する出力部と、を備えることを特徴としている。
【0009】
請求項11に記載の発明は、1つの出射光が反射して生成される複数の反射光に関する複数の項目を含む測定データに対して所定の処理を行うデータ処理装置で実行されるデータ処理方法であって、前記複数の項目を含む測定データを取得する取得工程と、取得した前記測定データのうち、マルチエコーを示す複数の受光データについての複数の抽出条件から少なくとも一つの抽出条件を設定し、さらに、取得した前記測定データのうち出力する際の通信データとして必要なデータによるデータ構成を任意に設定する設定工程と、設定された前記抽出条件により抽出された前記受光データを含む前記通信データを、設定された前記データ構成で出力する出力工程と、を含むことを特徴としている。
【0010】
請求項12に記載の発明は、請求項11に記載のデータ処理方法をコンピュータにより実行させることを特徴としている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
積算巻尺
23日前
丸一株式会社
試験用継手
21日前
個人
水準器
8日前
個人
電波反射強度向上方法
22日前
個人
シート形状体温計
4日前
株式会社大真空
センサ
1日前
大和製衡株式会社
組合せ秤
22日前
株式会社チノー
液浸プローブ
3日前
三菱電機株式会社
レーダ装置
28日前
アズビル株式会社
圧力センサ
21日前
日本電波工業株式会社
風速測定装置
1日前
キヤノン電子株式会社
サーボ加速度計
29日前
株式会社東芝
センサ
15日前
トヨタ自動車株式会社
解析装置
1日前
株式会社東芝
センサ
8日前
キヤノン電子株式会社
サーボ加速度計
15日前
キヤノン電子株式会社
サーボ加速度計
29日前
キヤノン電子株式会社
サーボ加速度計
15日前
トヨタ自動車株式会社
評価装置
28日前
大和製衡株式会社
搬送装置
15日前
株式会社豊田自動織機
車両
3日前
株式会社島津製作所
液体注入装置
15日前
個人
コンベックスルール用の計測補助用具
1日前
富士電機株式会社
エンコーダ
22日前
ニチコン株式会社
コンデンサ
22日前
能美防災株式会社
構造物劣化診断システム
15日前
株式会社不二越
X線測定装置
22日前
ミツミ電機株式会社
入力装置
15日前
株式会社リコー
測距システム
16日前
株式会社ピーエムティー
検査ゲージ
1日前
ミツミ電機株式会社
入力装置
16日前
トヨタ自動車株式会社
電池検査装置
10日前
個人
道または交差点を表現するアルゴリズム
17日前
個人
純金を作用電極に用いたORP測定装置
29日前
株式会社山城建設
鉄筋用ロッド支持具
22日前
株式会社レゾナック
異物検出装置
15日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ