TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024179572
公報種別
公開特許公報(A)
公開日
2024-12-26
出願番号
2023098529
出願日
2023-06-15
発明の名称
物体位置検出装置
出願人
株式会社アイシン
代理人
弁理士法人酒井国際特許事務所
主分類
G06T
7/70 20170101AFI20241219BHJP(計算;計数)
要約
【課題】広角カメラで撮像された画像を用いつつも、処理負荷や計算リソースの軽減が可能な物体位置検出装置を提供する。
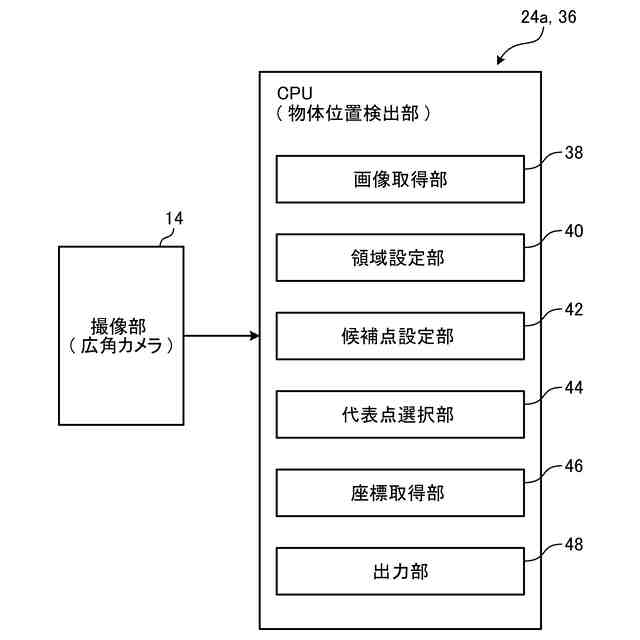
【解決手段】物体位置検出は、車室の周囲の状況を広角カメラで撮像した広角画像の撮像データを取得する画像取得部と、広角画像において物体が存在すると見なせる領域を囲む注目領域を設定する領域設定部と、注目領域を定義する境界線上または境界線の近傍位置に物体の存在位置の候補となり得る複数の候補点を設定する候補点設定部と、注目領域の領域内の所定位置に基準点を定め、当該基準点と前記候補点に対して歪み補正を施し、物体の接地位置と見なせる代表点を歪み補正後の候補点の中から選択する代表点選択部と、代表点の三次元座標を取得する座標取得部と、三次元座標に基づき、物体の接地位置の位置情報を出力する出力部と、を含む。
【選択図】図3
特許請求の範囲
【請求項1】
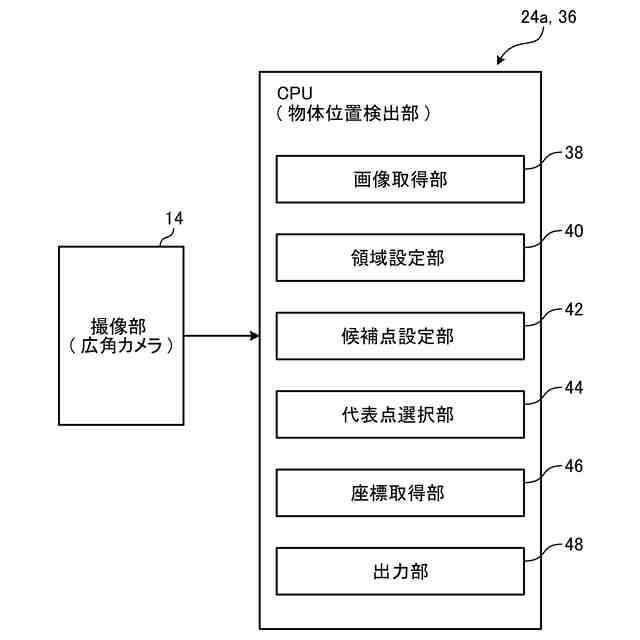
車室の周囲の状況を広角カメラで撮像した広角画像の撮像データを取得する画像取得部と、
前記広角画像において物体が存在すると見なせる領域を囲む注目領域を設定する領域設定部と、
前記注目領域を定義する境界線上または境界線の近傍位置に前記物体の存在位置の候補となり得る複数の候補点を設定する候補点設定部と、
前記注目領域の領域内の所定位置に基準点を定め、当該基準点と前記候補点に対して歪み補正を施し、前記物体の接地位置と見なせる代表点を歪み補正後の前記候補点の中から選択する代表点選択部と、
前記代表点の三次元座標を取得する座標取得部と、
前記三次元座標に基づき、前記物体の接地位置の位置情報を出力する出力部と、
を含む、物体位置検出装置。
続きを表示(約 300 文字)
【請求項2】
前記代表点選択部は、前記基準点から鉛直方向下向きに下ろす法線に対して、当該法線と直交する方向において最も近い位置の前記候補点を前記代表点とする、請求項1に記載の物体位置検出装置。
【請求項3】
前記領域設定部は、前記物体を囲む矩形の前記注目領域を設定し、
前記候補点設定部は、前記注目領域の境界線上に略等間隔で複数の前記候補点を設定する、請求項1に記載の物体位置検出装置。
【請求項4】
前記代表点選択部は、前記注目領域の中心に前記物体の中心位置が存在すると見なし、前記注目領域の中心に前記基準点を設定する、請求項1に記載の物体位置検出装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、物体位置検出装置に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
従来、車両の周囲に存在する物体を検出する技術として、車載カメラで撮像した画像に対して、物体検出(例えば、人物や他車両等の障害物の検出)を行う物体位置検出装置が種々提案されている。物体位置検出装置は、物体の有無の検出、物体までの距離の検出、物体の三次元座標の算出、物体が移動している場合、物体の移動速度や移動方向等を取得可能であり、それらの検出結果を車両制御に利用することができる。このような車載の物体位置検出装置で利用される車載カメラは、少ない台数のカメラで、できるだけ広範囲の情報(画像)を取得することが望ましく、広角レンズ(例えば、魚眼レンズ)を装着した広角カメラ(魚眼カメラ)が用いられる場合が多い。
【先行技術文献】
【特許文献】
【0003】
特開2022-155102号公報
特許第6891954号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来技術において、物体位置検出装置で利用される広角カメラ(魚眼カメラ)で撮像された画像は、周縁部に向かうほど歪みが大きくなる傾向がある。そのため、正確な物体の位置を検出するためには、取得した画像に歪み補正を施した後、物体検出処理を行う必要があった。そのため、物体位置検出装置の処理負荷が大きく、計算リソースの限られた車載装置においては、改善の余地がある。
【0005】
そこで、本開示の課題の一つは、広角カメラ(魚眼カメラ)で撮像された画像を用いつつも、処理負荷や計算リソースの軽減が可能な物体位置検出装置を提供することである。
【課題を解決するための手段】
【0006】
本開示の一例としての物体位置検出は、車室の周囲の状況を広角カメラで撮像した広角画像の撮像データを取得する画像取得部と、前記広角画像において物体が存在すると見なせる領域を囲む注目領域を設定する領域設定部と、前記注目領域を定義する境界線上または境界線の近傍位置に前記物体の存在位置の候補となり得る複数の候補点を設定する候補点設定部と、前記注目領域の領域内の所定位置に基準点を定め、当該基準点と前記候補点に対して歪み補正を施し、前記物体の接地位置と見なせる代表点を歪み補正後の前記候補点の中から選択する代表点選択部と、前記代表点の三次元座標を取得する座標取得部と、前記三次元座標に基づき、前記物体の接地位置の位置情報を出力する出力部と、を含む。この構成によれば、例えば、歪み補正処理等の処理は、広角画像全体ではなく、基準点と補正点(代表点を含む)のみとするので、処理負荷や計算リソースの軽減ができる。
【0007】
また、上述の物体位置検出装置の前記代表点選択部は、例えば、前記基準点から鉛直方向下向きに下ろす法線に対して、当該法線と直交する方向において最も近い位置の前記候補点を前記代表点とするようにしてもよい。この構成によれば、例えば、代表点の選択をより正確かつ容易に実施することができる。
【0008】
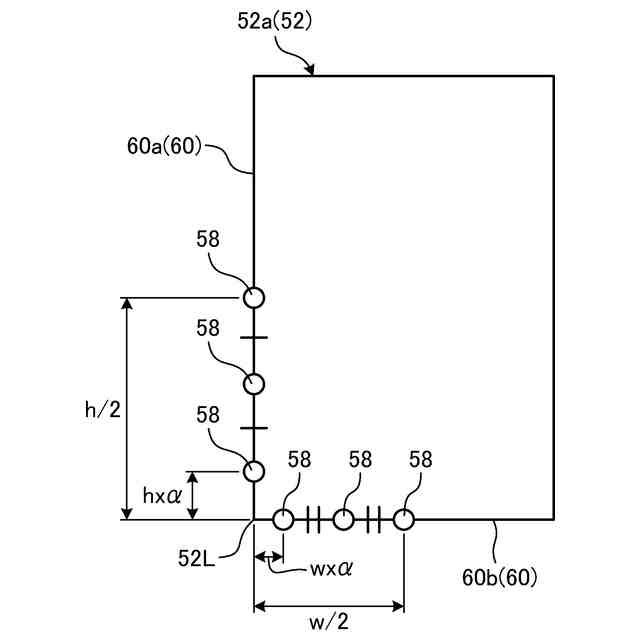
また、上述の物体位置検出装置の前記領域設定部は、例えば、前記物体を囲む矩形の前記注目領域を設定し、前記候補点設定部は、前記注目領域の境界線上に略等間隔で複数の前記候補点を設定するようにしてもよい。この構成によれば、例えば、代表点となり得る候補点を効率的に設定することができる。
【0009】
また、上述の物体位置検出装置の前記代表点選択部は、例えば、前記注目領域の中心に前記物体の中心位置が存在すると見なし、前記注目領域の中心に前記基準点を設定するようにしてもよい。この構成によれば、例えば、代表点を選択するために用いる基準点の設定を容易かつより適切に行うことができる。
【図面の簡単な説明】
【0010】
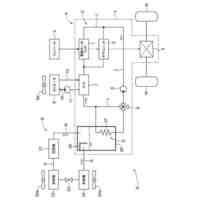
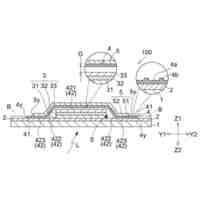
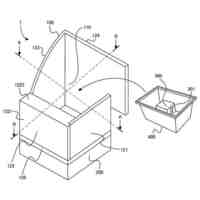
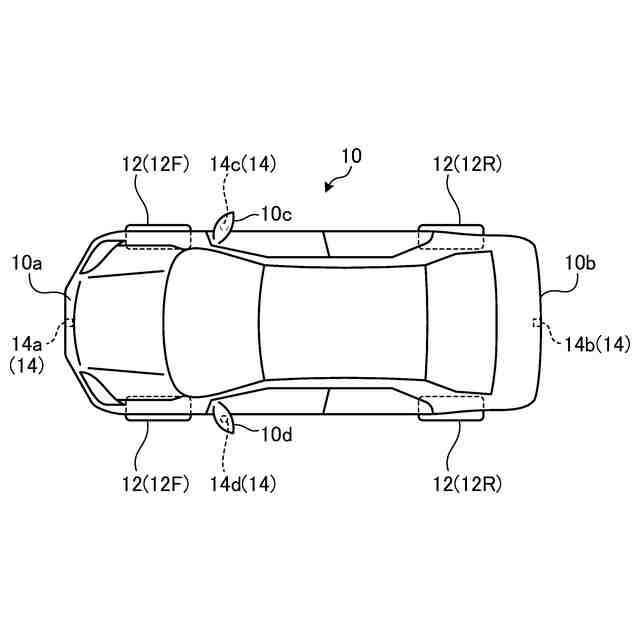
図1は、実施形態にかかる物体位置検出装置を搭載可能な車両を示す例示的かつ模式的な平面図である。
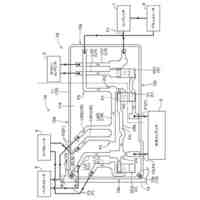
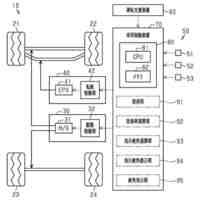
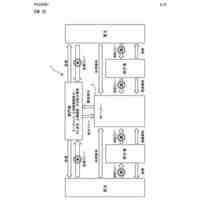
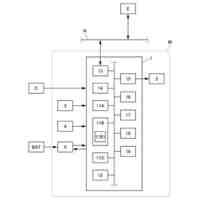
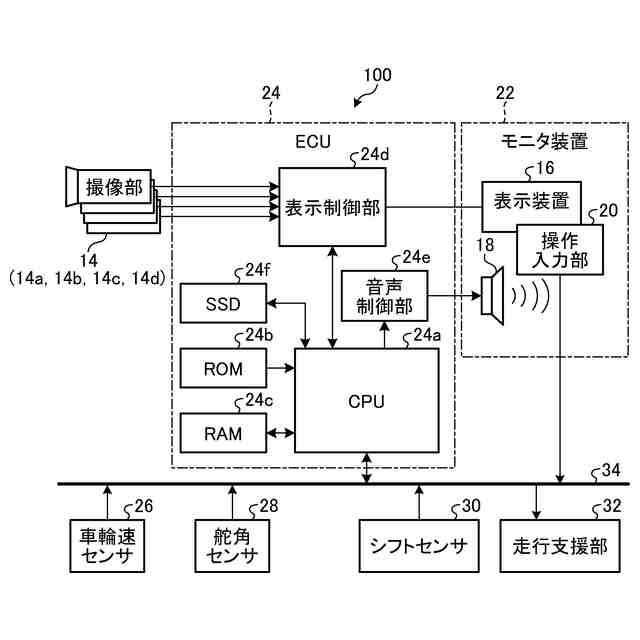
図2は、実施形態にかかる物体位置検出装置を含む制御システムの構成を示す例示的かつ模式的なブロック図である。
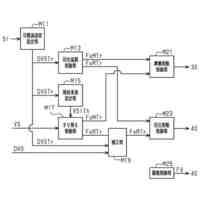
図3は、実施形態にかかる物体位置検出装置(物体位置検出部)をCPUで実現する場合の構成を示す例示的かつ模式的なブロック図である。
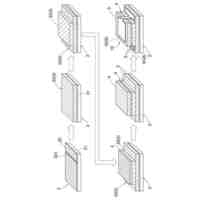
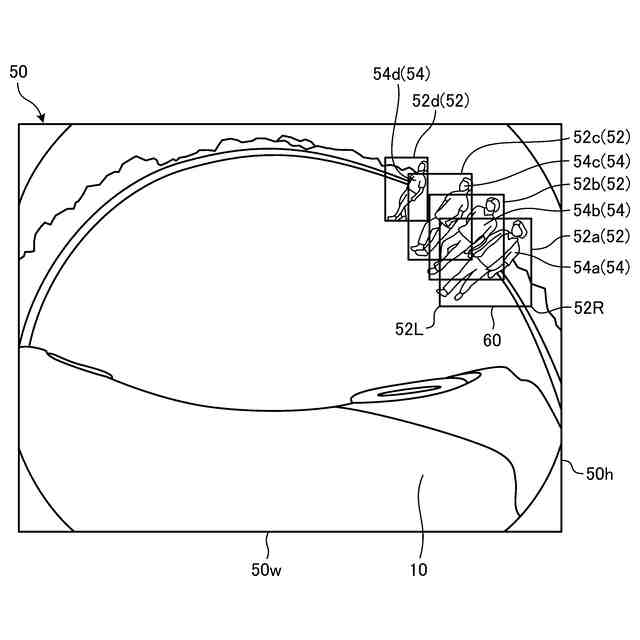
図4は、実施形態にかかる物体位置検出装置が利用する広角画像における注目領域の設定状態を示す例示的かつ模式的な図である。
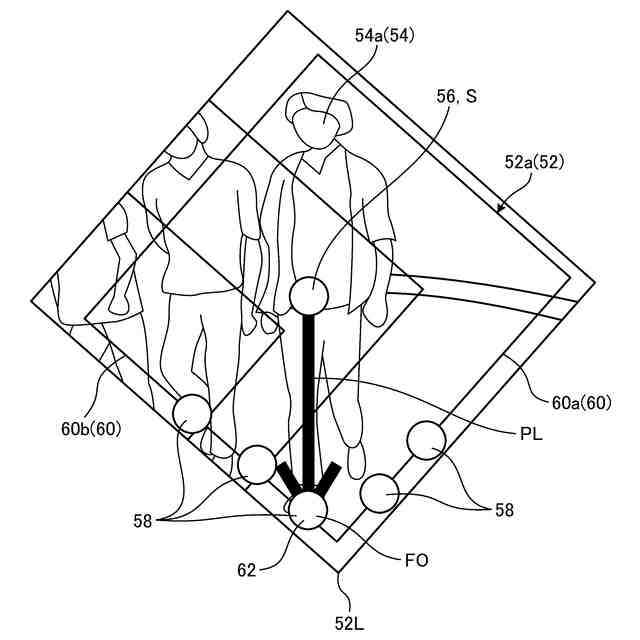
図5は、実施形態にかかる物体位置検出装置において物体位置を検出する際に利用する注目領域に基準点と候補点の設定した状態を示す例示的かつ模式的な図である。
図6は、実施形態にかかる物体位置検出装置において候補点の設定を詳細に示す例示的かつ模式的な図である。
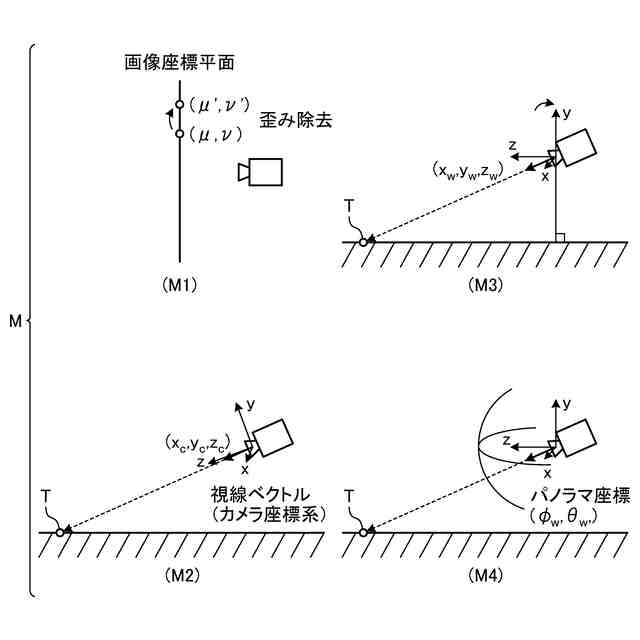
図7は、実施形態にかかる物体位置検出装置おける代表点を選択する際に用いるパノラマ変換処理のイメージを示す例示的かつ模式的な図である。
図8は、実施形態にかかる物体位置検出装置が利用する広角画像が、鉛直方向の歪みを含むことを示す例示的かつ模式的なイメージ図である。
図9は、実施形態にかかる物体位置検出装置が利用する広角画像に対して鉛直方向の歪みが正距円筒図法によるパノラマ変換で除去された状態を示す例示的かつ模式的なイメージ図である。
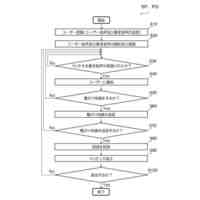
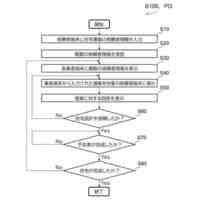
図10は、実施形態にかかる物体位置検出装置おける物体位置検出処理の流れを示す例示的なフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社アイシン
気液分離器
3日前
株式会社アイシン
GM冷凍機
4日前
株式会社アイシン
車載充電装置
4日前
株式会社アイシン
直線移動機構
3日前
株式会社アイシン
マニホールド
3日前
株式会社アイシン
車載充電装置
4日前
株式会社アイシン
熱交換システム
4日前
株式会社アイシン
回路モジュール
5日前
株式会社アイシン
配送支援システム
11日前
株式会社アイシン
電子部品ユニット
4日前
株式会社アイシン
巻線界磁型回転電機
4日前
株式会社アイシン
車両用スパッツ装置
4日前
株式会社アイシン
充電コネクタ挿抜装置
3日前
株式会社アイシン
ペロブスカイト太陽電池
3日前
株式会社アイシン
車両用のバッテリーケース
10日前
株式会社アイシン
磁場発生装置及び核磁気共鳴装置
4日前
株式会社アイシン
アキュムレータ及び車両駆動装置
4日前
株式会社アイシン
ホール輸送層の作製方法及びホール輸送層
4日前
株式会社アドヴィックス
回生協調制御装置
4日前
株式会社アイシン
情報処理装置、および、アノテーションプログラム
5日前
豊田合成株式会社
ルーフウェザストリップの取付構造
3日前
株式会社アドヴィックス
車両制御装置及び車両制御プログラム
10日前
株式会社アドヴィックス
曲率推定装置、車両制御装置及び曲率推定プログラム
10日前
個人
情報提示方法
18日前
個人
プログラム
10日前
個人
自動精算システム
2か月前
個人
アカウントマップ
11日前
個人
RFタグ読取装置
1か月前
個人
自動精算システム
26日前
個人
プログラム
17日前
個人
売買システム
1か月前
個人
管理サーバ
1か月前
個人
発想支援方法及びシステム
21日前
個人
市場受発注システム
24日前
日本精機株式会社
車両用表示装置
1か月前
個人
学習装置及び推論装置
10日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ