TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025018721
公報種別
公開特許公報(A)
公開日
2025-02-06
出願番号
2023122697
出願日
2023-07-27
発明の名称
回生協調制御装置
出願人
株式会社アドヴィックス
,
株式会社アイシン
代理人
個人
,
個人
主分類
B60T
8/17 20060101AFI20250130BHJP(車両一般)
要約
【課題】すり替え制御の実行に起因した車両の減速度の変動を抑制できるようにすること。
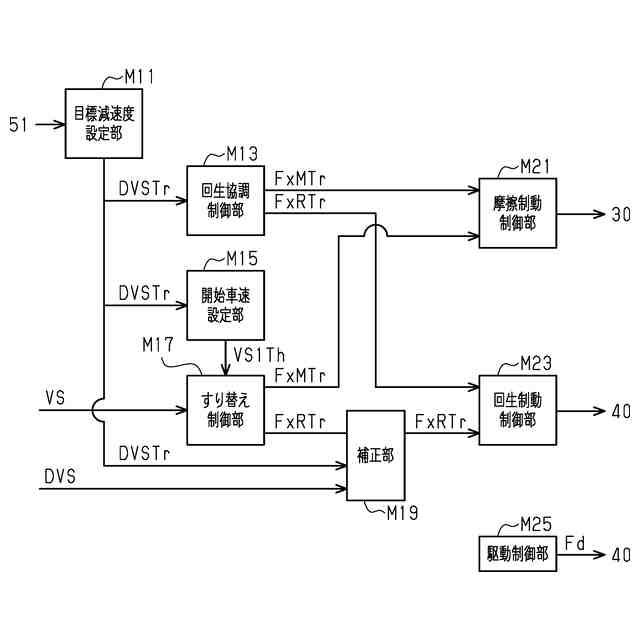
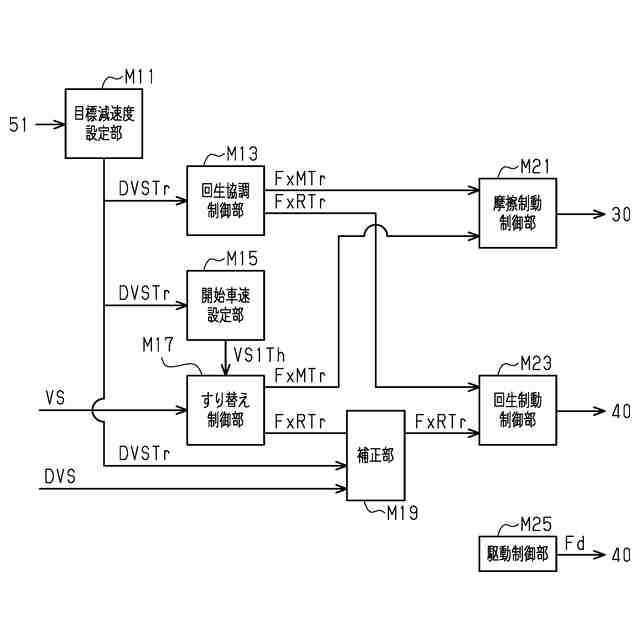
【解決手段】回生協調制御装置は、回生制動力が車両に付与されている状況下で、回生制動力を摩擦制動力にすり替えるすり替え制御を実行するすり替え制御部M17と、すり替え制御が実行されている場合に、回生制動力及び摩擦制動力のうちの応答速度の高い制動力を、車両の減速度と目標減速度との差分の大きさが小さくなるように補正する補正処理を実行する補正部M19とを備えている。
【選択図】図2
特許請求の範囲
【請求項1】
回生制動力を車両に付与する回生制動装置と、摩擦制動力を前記車両に付与する摩擦制動装置と、を備える前記車両に適用される回生協調制御装置であって、
前記回生制動力が前記車両に付与されている状況下で、前記回生制動力を前記摩擦制動力にすり替えるすり替え制御を実行するすり替え制御部と、
前記すり替え制御が実行されている場合に、前記回生制動力及び前記摩擦制動力のうちの応答速度の高い制動力を、前記車両の減速度と目標減速度との差分の大きさが小さくなるように補正する補正処理を実行する補正部と、を備える
回生協調制御装置。
続きを表示(約 580 文字)
【請求項2】
前記車両は、前記摩擦制動装置として、ホイールシリンダ内の液圧を増加させることによって前記摩擦制動力を付与する液圧制動装置を有し、
前記補正部は、前記補正処理において、前記回生制動力を、前記車両の減速度と前記目標減速度との差分の大きさが小さくなるように補正する
請求項1に記載の回生協調制御装置。
【請求項3】
前記補正部は、前記すり替え制御が開始されると前記補正処理を開始し、前記回生制動力が0(零)になる直前に当該補正処理を終了する
請求項1に記載の回生協調制御装置。
【請求項4】
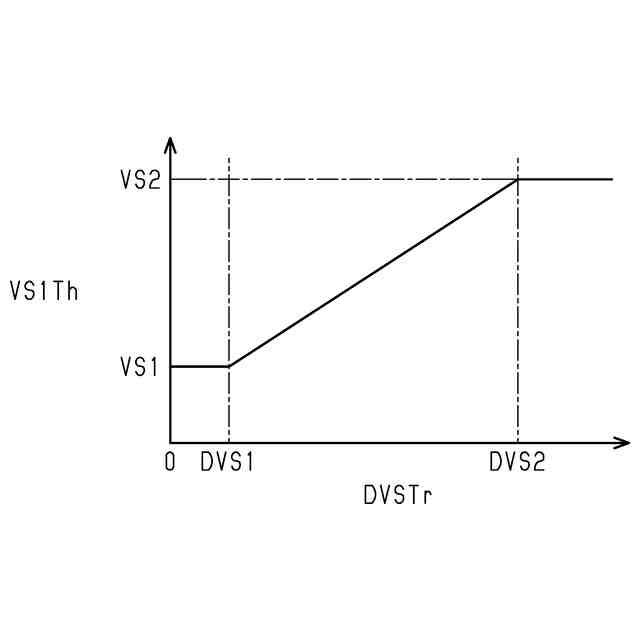
前記すり替え制御の開始車速を、前記目標減速度が低いほど小さい車速に設定する開始車速設定部を備え、
前記すり替え制御部は、車速が前記開始車速以下になると、前記すり替え制御を開始する
請求項1~請求項3のうち何れか一項に記載の回生協調制御装置。
【請求項5】
前記回生制動装置は、前記車両の車輪に回生制動力又は駆動力の一方を付与可能な制駆動装置であり、
前記車両が降坂路で停止した場合には前記車輪を後退方向に回転させるための前記駆動力が前記車輪に付与されるように、前記制駆動装置を制御する制駆動制御部を備える
請求項1に記載の回生協調制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、回生協調制御装置に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
特許文献1は、車両に付与する回生制動力及び摩擦制動力を制御する回生協調制御装置を開示している。この回生協調制御装置は、回生制動力が付与されている状況下で車速が所定車速以下になった場合に、回生制動力を徐々に減少させるとともに摩擦制動力を徐々に増加させるすり替え制御を実行する。
【先行技術文献】
【特許文献】
【0003】
国際公開第WO2010/128652号
【発明の概要】
【発明が解決しようとする課題】
【0004】
回生制動力と摩擦制動力とでは応答速度が異なる。そのため、すり替え制御の実行中においては、回生制動力の実値と摩擦制動力の実値との和がばらついてしまうために車両の減速度が変動するおそれがある。
【課題を解決するための手段】
【0005】
上記課題を解決するための回生協調制御装置は、回生制動力を車両に付与する回生制動装置と、摩擦制動力を前記車両に付与する摩擦制動装置と、を備える前記車両に適用される装置である。当該回生協調制御装置は、前記回生制動力が前記車両に付与されている状況下で、前記回生制動力を前記摩擦制動力にすり替えるすり替え制御を実行するすり替え制御部と、前記すり替え制御が実行されている場合に、前記回生制動力及び前記摩擦制動力のうちの応答速度の高い制動力を、前記車両の減速度と目標減速度との差分の大きさが小さくなるように補正する補正処理を実行する補正部と、を備えている。
【発明の効果】
【0006】
上記回生協調制御装置は、すり替え制御の実行に起因した車両の減速度の変動を抑制できるという効果を奏する。
【図面の簡単な説明】
【0007】
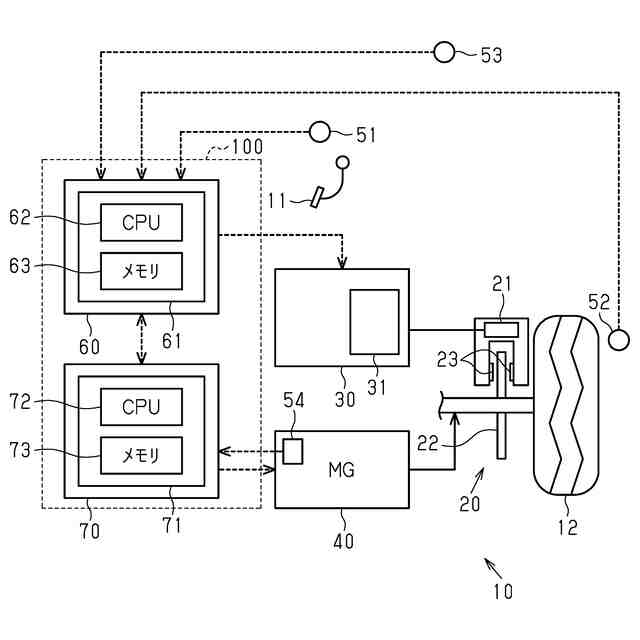
図1は、実施形態の回生協調制御装置を備えた車両の概略を示す構成図である。
図2は、図1の回生協調制御装置の機能構成を示すブロック図である。
図3は、目標減速度とすり替え制御の開始車速との関係を示すマップである。
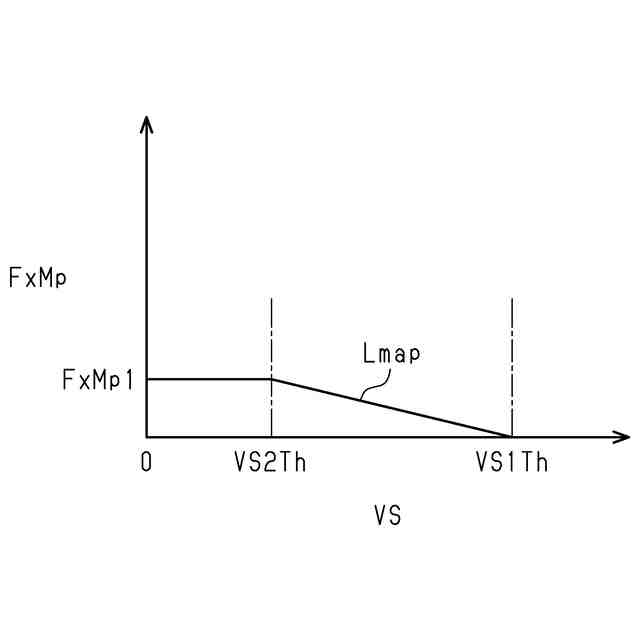
図4は、予備すり替え制御の実行時における摩擦制動力指示値の増加量を決めるマップである。
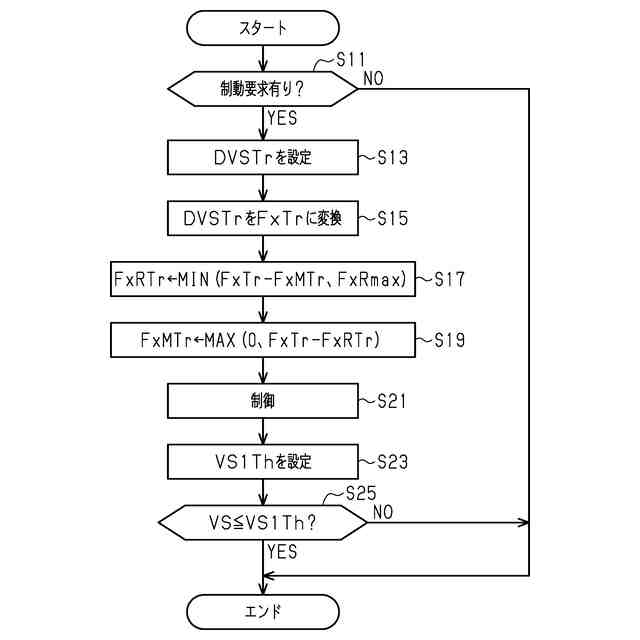
図5は、図1の回生協調制御装置において、車両に制動力を付与する際における処理の流れを示すフローチャートである。
図6は、図1の回生協調制御装置において、すり替え制御を実行する際における処理の流れを示すフローチャートである。
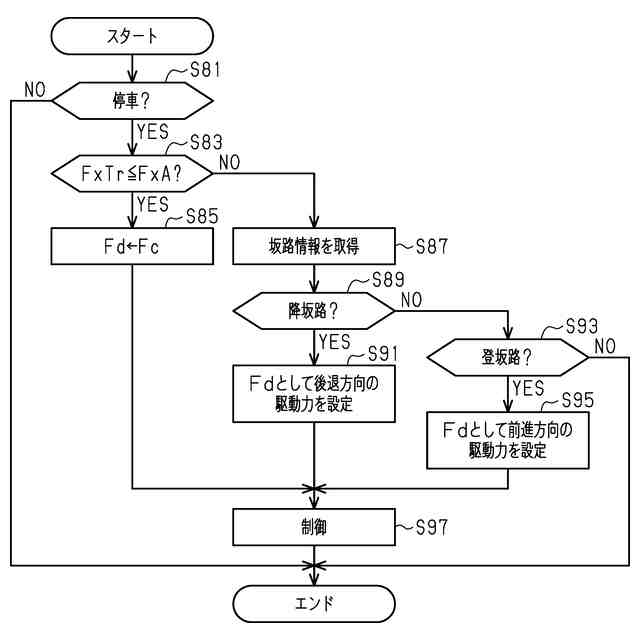
図7は、図1の回生協調制御装置において、停車中における処理の流れを示すフローチャートである。
図8は、制動力の付与によって車両を停止させる際のタイミングチャートである。
【発明を実施するための形態】
【0008】
以下、回生協調制御装置の一実施形態を図1から図8に従って説明する。
図1は、回生協調制御装置100を備える車両10を図示している。車両10は、制動操作部材11と、複数の車輪12と、複数の摩擦ブレーキ20と、摩擦制動装置30と、モータジェネレータ40と、複数のセンサとを備えている。制動操作部材11は、車両10を減速させる際に運転者が操作する部材である。制動操作部材11の一例はブレーキペダルである。図1においては、複数の車輪12及び摩擦ブレーキ20のうち、1つの車輪12及び摩擦ブレーキ20のみを図示している。
【0009】
<摩擦ブレーキ>
複数の摩擦ブレーキ20は、対応する車輪12に摩擦制動力を付与すべくそれぞれ作動する。摩擦ブレーキ20は、ホイールシリンダ21と回転体22と摩擦材23とを有している。回転体22は車輪12と一体に回転する。そのため、摩擦材23を回転体22に押し付けることにより、車輪12に摩擦制動力が付与される。ホイールシリンダ21内の液圧が高いほど、回転体22に摩擦材23を押し付ける力が大きくなる。そのため、摩擦ブレーキ20では、ホイールシリンダ21内の液圧が高いほど大きい摩擦制動力を車輪12に付与できる。
【0010】
<摩擦制動装置>
摩擦制動装置30は、ブレーキ液を吐出する吐出源31を有している。吐出源31としては、例えば、電動式のポンプ及び電動式のシリンダを挙げることができる。吐出源31から吐出されたブレーキ液がホイールシリンダ21に供給されることにより、車輪12に摩擦制動力が付与される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る


 特許ウォッチ
特許ウォッチ