TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024177417
公報種別
公開特許公報(A)
公開日
2024-12-19
出願番号
2024174565,2023540441
出願日
2024-10-03,2022-08-05
発明の名称
制御装置
出願人
京セラ株式会社
,
株式会社Rist
代理人
個人
,
個人
,
個人
,
個人
主分類
B25J
9/22 20060101AFI20241212BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】対象物に適したライブラリを提示するライブラリ提示装置、ライブラリ提示方法及びロボット制御システムが提供される。
【解決手段】ライブラリ提示装置(10)は、対象物を含む入力情報を取得する入力情報取得部(131)と、前記対象物に対するタスクを実行可能な複数のライブラリを用いて、対象物に対する所定のタスクを適用した結果を取得可能な結果取得部(132)と、所定のタスクを適用した結果に対する評価を取得する評価取得部(133)と、複数のライブラリのうち第1ライブラリを用いた所定のタスクの適用結果の評価に基づき、前記複数のライブラリのうち第1ライブラリと異なる第2ライブラリを用いた所定のタスクの適用結果の出力を判定する提示内容決定部(134)と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
対象物を含む入力情報を取得する入力情報取得部と、
前記対象物に対するタスクを実行可能な複数のライブラリを用いて、前記対象物に対する所定のタスクを適用した結果を取得可能な結果取得部と、
前記所定のタスクを適用した結果に対する評価を取得する評価取得部と、
前記複数のライブラリのうち第1ライブラリを用いた前記所定のタスクの適用結果の評価に基づき、前記複数のライブラリのうち前記第1ライブラリと異なる第2ライブラリを用いた前記所定のタスクの適用結果の出力を判定する提示内容決定部と、を備える、ライブラリ提示装置。
続きを表示(約 1,500 文字)
【請求項2】
前記結果取得部は、前記複数のライブラリを組み合わせた場合の前記所定のタスクを適用した結果を取得し、
前記提示内容決定部は、前記第1ライブラリ及び前記第2ライブラリと異なる第3ライブラリと、前記第2ライブラリとを組み合わせて用いた前記所定のタスクの適用結果を提示させる、請求項1に記載のライブラリ提示装置。
【請求項3】
前記評価取得部は、前記所定のタスクに対する期待結果を取得した場合に、前記期待結果に基づき前記所定のタスクを適用した結果に対する評価を取得する、請求項1又は2に記載のライブラリ提示装置。
【請求項4】
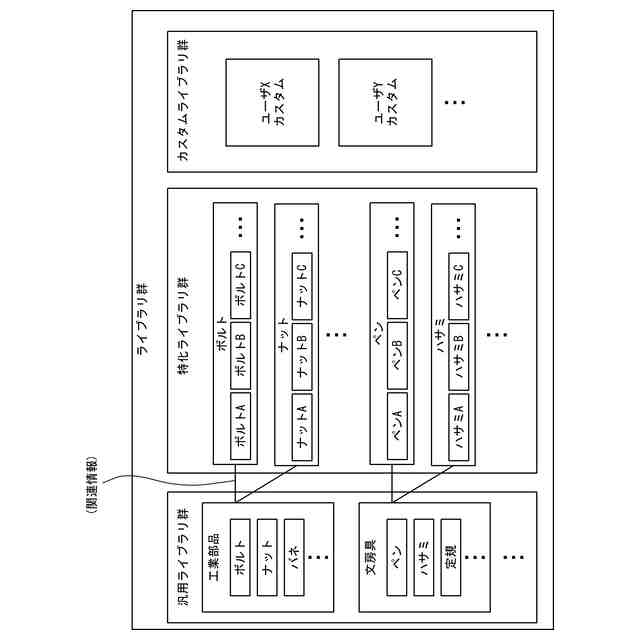
前記提示内容決定部は、ライブラリの関係を定義する関連情報に基づき、前記第1ライブラリと所定の関係を有する前記第2ライブラリを用いた前記所定のタスクの適用結果を前記結果取得部に取得させる、請求項1又は2に記載のライブラリ提示装置。
【請求項5】
前記複数のライブラリは、第1分類で前記対象物を認識するための汎用ライブラリと、前記第1分類の1つの項目について細分化する第2分類で前記対象物を認識する特化ライブラリと、を含む、請求項1又は2に記載のライブラリ提示装置。
【請求項6】
前記結果取得部は、複数の前記汎用ライブラリ又は前記汎用ライブラリと前記特化ライブラリを組み合わせた場合の前記所定のタスクを適用した結果を取得する、請求項5に記載のライブラリ提示装置。
【請求項7】
前記提示内容決定部は、前記第2ライブラリを用いた前記所定のタスクの適用結果に対する評価が所定の基準未満の場合に、新たなライブラリの生成の提案を提示させる、請求項1又は2に記載のライブラリ提示装置。
【請求項8】
前記ライブラリ、前記第1ライブラリ、及び前記第2ライブラリは、前記対象物を認識する機械学習モデルとして構成され、
前記所定のタスクは、前記対象物を認識した結果に基づいて実施される、請求項1又は2に記載のライブラリ提示装置。
【請求項9】
ライブラリ提示装置が実行するライブラリ提示方法であって、
対象物を含む入力情報を取得することと、
前記対象物に対するタスクを実行可能な複数のライブラリを用いて、前記対象物に対する所定のタスクを適用した結果を取得することと、
前記所定のタスクを適用した結果に対する評価を取得することと、
前記複数のライブラリのうち第1ライブラリを用いた前記所定のタスクの適用結果の評価に基づき、前記複数のライブラリのうち前記第1ライブラリと異なる第2ライブラリを用いた前記所定のタスクの適用結果の出力を判定することと、を含む、ライブラリ提示方法。
【請求項10】
ロボットと、
前記ロボットを制御するために、ライブラリ提示装置によって提示されるライブラリをダウンロードするロボット制御装置と、を備え、
前記ライブラリ提示装置は、
対象物を含む入力情報を取得する入力情報取得部と、
前記対象物に対するタスクを実行可能な複数のライブラリを用いて、前記対象物に対する所定のタスクを適用した結果を取得可能な結果取得部と、
前記所定のタスクを適用した結果に対する評価を取得する評価取得部と、
前記複数のライブラリのうち第1ライブラリを用いた前記所定のタスクの適用結果の評価に基づき、前記複数のライブラリのうち前記第1ライブラリと異なる第2ライブラリを用いた前記所定のタスクの適用結果の出力を判定する提示内容決定部と、を備える、ロボット制御システム。
発明の詳細な説明
【関連出願の相互参照】
【0001】
本出願は、日本国特許出願2021-129342号(2021年8月5日出願)の優先権を主張するものであり、当該出願の開示全体を、ここに参照のために取り込む。
続きを表示(約 2,100 文字)
【技術分野】
【0002】
本開示は、ライブラリ提示装置、ライブラリ提示方法及びロボット制御システムに関する。
【背景技術】
【0003】
従来、学習画像を用いた学習などによって、画像に含まれる物体を識別する装置が知られている。例えば、特許文献1は、熟練していない従事者でも利用可能な、画像から様々な物体を認識して作業を行うロボットを開示する。
【先行技術文献】
【特許文献】
【0004】
特開2021-30407号公報
【発明の概要】
【0005】
本開示の一実施形態に係るライブラリ提示装置は、
対象物を含む入力情報を取得する入力情報取得部と、
前記対象物に対するタスクを実行可能な複数のライブラリを用いて、前記対象物に対する所定のタスクを適用した結果を取得可能な結果取得部と、
前記所定のタスクを適用した結果に対する評価を取得する評価取得部と、
前記複数のライブラリのうち第1ライブラリを用いた前記所定のタスクの適用結果の評価に基づき、前記複数のライブラリのうち前記第1ライブラリと異なる第2ライブラリを用いた前記所定のタスクの適用結果の出力を判定する提示内容決定部と、を備える。
【0006】
本開示の一実施形態に係るライブラリ提示方法は、
ライブラリ提示装置が実行するライブラリ提示方法であって、
対象物を含む入力情報を取得することと、
前記対象物に対するタスクを実行可能な複数のライブラリを用いて、前記対象物に対する所定のタスクを適用した結果を取得することと、
前記所定のタスクを適用した結果に対する評価を取得することと、
前記複数のライブラリのうち第1ライブラリを用いた前記所定のタスクの適用結果の評価に基づき、前記複数のライブラリのうち前記第1ライブラリと異なる第2ライブラリを用いた前記所定のタスクの適用結果の出力を判定することと、を含む。
【0007】
本開示の一実施形態に係るロボット制御システムは、
ロボットと、
前記ロボットを制御するために、ライブラリ提示装置によって提示されるライブラリをダウンロードするロボット制御装置と、を備え、
前記ライブラリ提示装置は、
対象物を含む入力情報を取得する入力情報取得部と、
前記対象物に対するタスクを実行可能な複数のライブラリを用いて、前記対象物に対する所定のタスクを適用した結果を取得可能な結果取得部と、
前記所定のタスクを適用した結果に対する評価を取得する評価取得部と、
前記複数のライブラリのうち第1ライブラリを用いた前記所定のタスクの適用結果の評価に基づき、前記複数のライブラリのうち前記第1ライブラリと異なる第2ライブラリを用いた前記所定のタスクの適用結果の出力を判定する提示内容決定部と、を備える。
【図面の簡単な説明】
【0008】
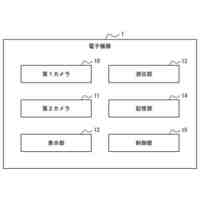
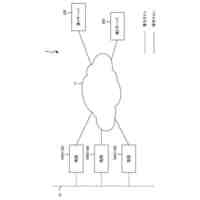
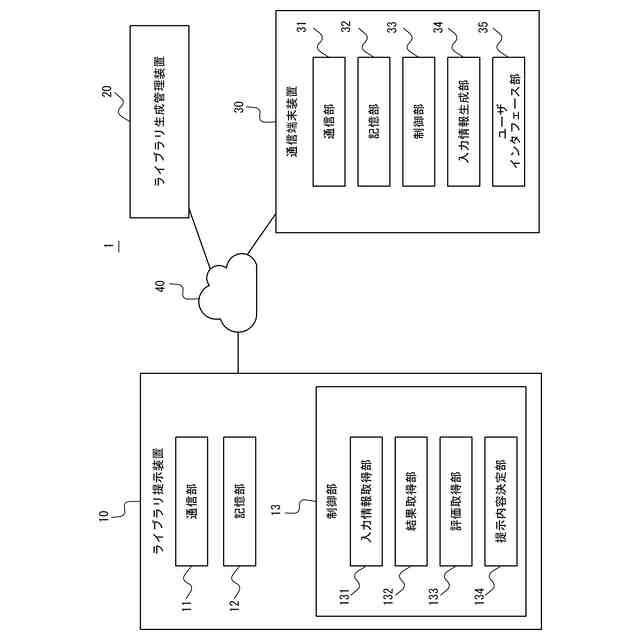
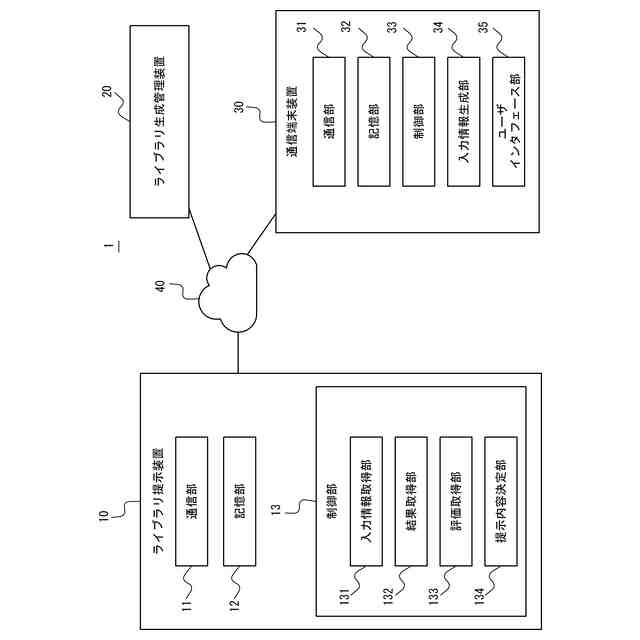
図1は、一実施形態に係るライブラリ提示装置を備えるライブラリ提示システムの構成例を示す図である。
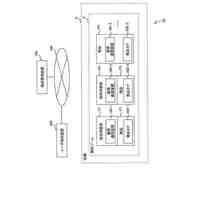
図2は、ロボット制御システムの構成例を示す模式図である。
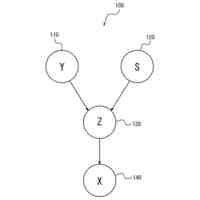
図3は、ライブラリ群の構成例を示す図である。
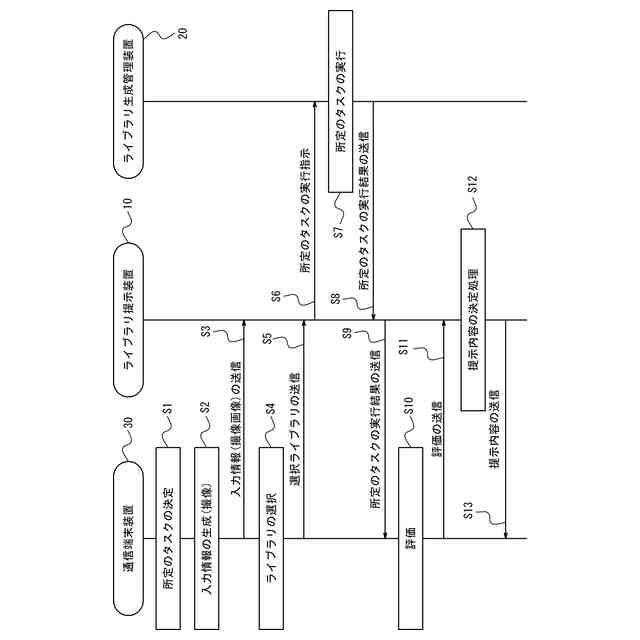
図4は、ライブラリ提示システムにおける処理の手順の一例を示すシーケンス図である。
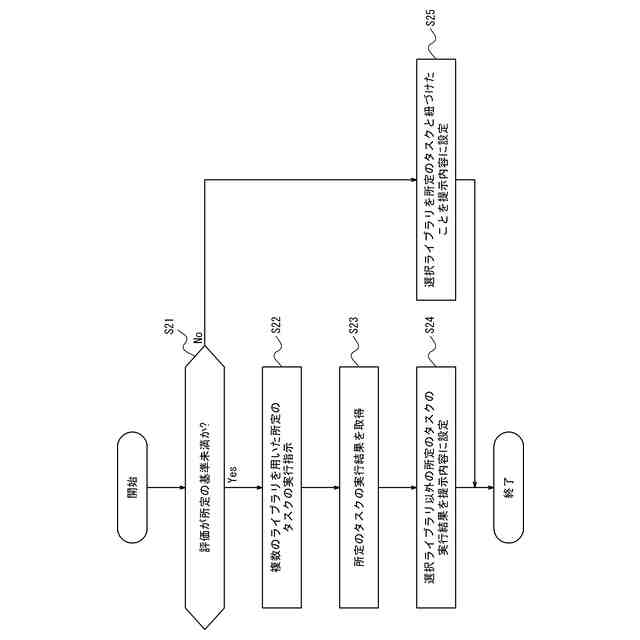
図5は、ライブラリ提示装置の提示内容を決定する処理の例を示すフローチャートである。
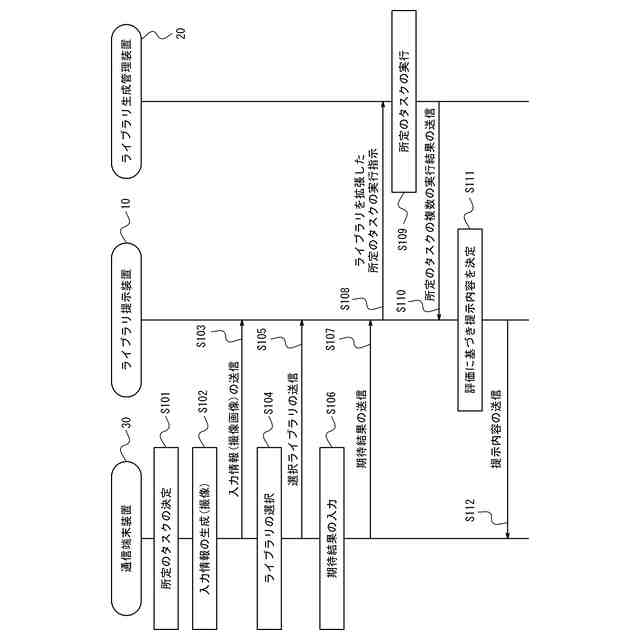
図6は、ライブラリ提示システムにおける処理の手順の別の例を示すシーケンス図である。
【発明を実施するための形態】
【0009】
以下、図面を参照して本開示の一実施形態に係るライブラリ提示装置、ライブラリ提示方法及びロボット制御システムが説明される。各図中、同一又は相当する部分には、同一符号が付されている。本実施形態の説明において、同一又は相当する部分については、説明を適宜省略又は簡略化する。
【0010】
(ライブラリ提示システムの概要)
図1は、本実施形態に係るライブラリ提示装置10を備えるライブラリ提示システム1の構成例を示す。ライブラリ提示装置10は、ユーザが所定のタスクを実行する場合に、所定のタスクに適したライブラリの提示を行う装置である。所定のタスクは、例えば物体の認識、識別あるいは識別結果の表示又は物体の把持位置認識などの対象物を認識した結果に基づいて実施される処理である。ライブラリは、ユーザが利用可能な認識モデル又は認識プログラムなどである。ユーザは、例えばネットワーク40経由でライブラリをダウンロードすることによって利用できる。本実施形態において、ライブラリは、機械学習によって上記のタスクを実施可能に生成された少なくとも1つの機械学習モデル(学習済みモデル)として構成されるが、これに限定されない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
京セラ株式会社
識別部材
1か月前
京セラ株式会社
制御装置
5日前
京セラ株式会社
組み立て体
1か月前
京セラ株式会社
燃料電池装置
5日前
京セラ株式会社
燃料電池装置
7日前
京セラ株式会社
受光モジュール
7日前
京セラ株式会社
振動発電デバイス
5日前
京セラ株式会社
表示装置、表示方法
1か月前
京セラ株式会社
発光装置および造形装置
1か月前
京セラ株式会社
フィルタおよび通信装置
2か月前
京セラ株式会社
案内システム及び案内方法
1か月前
京セラ株式会社
弾性波装置および通信装置
2か月前
京セラ株式会社
報知装置及び交通情報提供装置
1か月前
京セラ株式会社
電源制御装置及び電源制御方法
2日前
京セラ株式会社
電源制御装置及び電源制御方法
2日前
京セラ株式会社
情報処理装置及び情報処理方法
13日前
京セラ株式会社
フィルタデバイスおよび通信装置
13日前
京セラ株式会社
刺激装置、刺激方法、及び装着体
15日前
京セラ株式会社
電子機器、表示方法及びプログラム
1か月前
京セラ株式会社
負荷制御システム及び負荷制御方法
2日前
京セラ株式会社
端末装置、操作方法及びプログラム
1か月前
京セラ株式会社
光素子搭載用パッケージ及び発光装置
5日前
京セラ株式会社
報知装置、交通情報提供装置及び車両
28日前
京セラ株式会社
送電装置、制御方法及び制御プログラム
6日前
京セラ株式会社
送電装置、制御方法及び制御プログラム
5日前
京セラ株式会社
振動発電デバイス及びセンサモジュール
5日前
京セラ株式会社
光通信装置、光通信方法、及びプログラム
1か月前
京セラ株式会社
配線基板、パッケージおよび圧電デバイス
5日前
京セラ株式会社
音出力装置、音出力方法、及びプログラム
28日前
京セラ株式会社
制御装置、表示システム、及び映像生成方法
1か月前
京セラ株式会社
分散電源管理システム及び分散電源管理方法
5日前
京セラ株式会社
電子部品収納用パッケージおよび電子モジュール
2日前
京セラ株式会社
電子機器、状態推定方法及び状態推定プログラム
13日前
京セラ株式会社
情報処理装置、提示装置、及び交通支援システム
13日前
京セラ株式会社
商品管理装置、接客支援システム、及び接客支援方法
5日前
京セラ株式会社
商品管理システム、器具通信装置、及び商品管理方法
5日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ