TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024176256
公報種別
公開特許公報(A)
公開日
2024-12-19
出願番号
2023094686
出願日
2023-06-08
発明の名称
塗装ロボットシステムおよびロボット
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
B25J
9/06 20060101AFI20241212BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットを、より小さな配置領域に配置することが可能な塗装ロボットシステムを提供する。
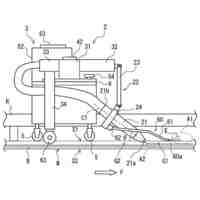
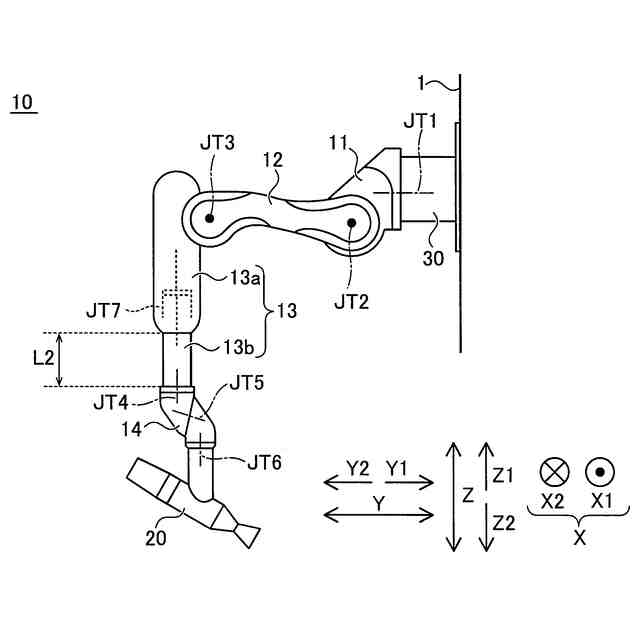
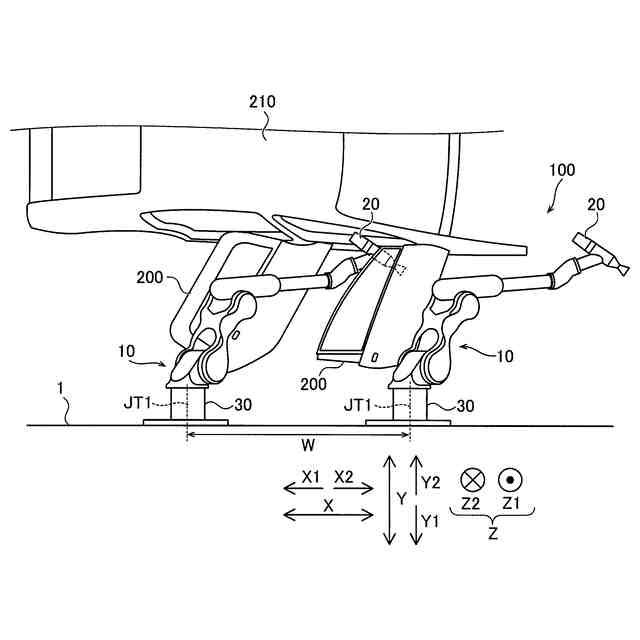
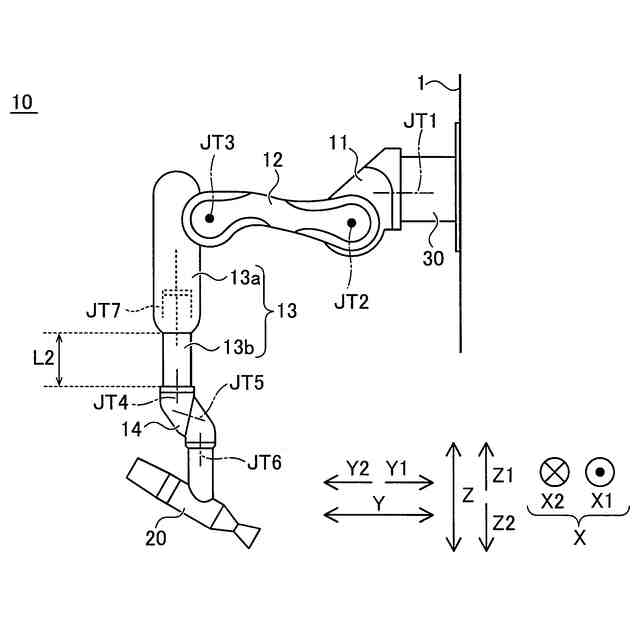
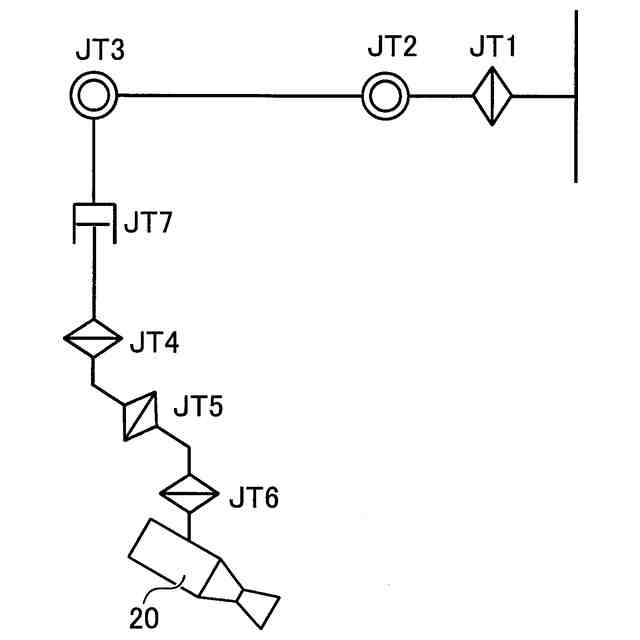
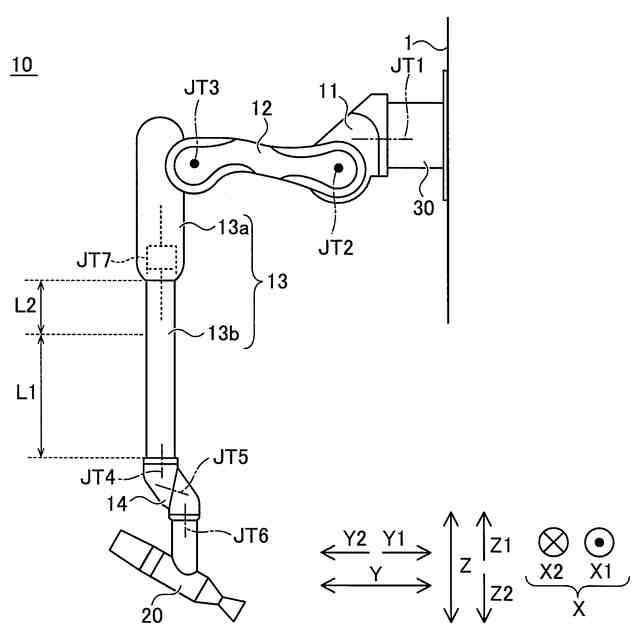
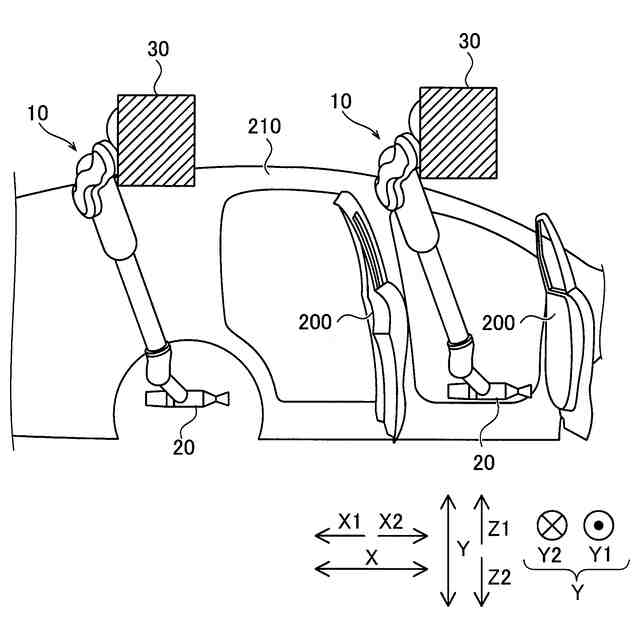
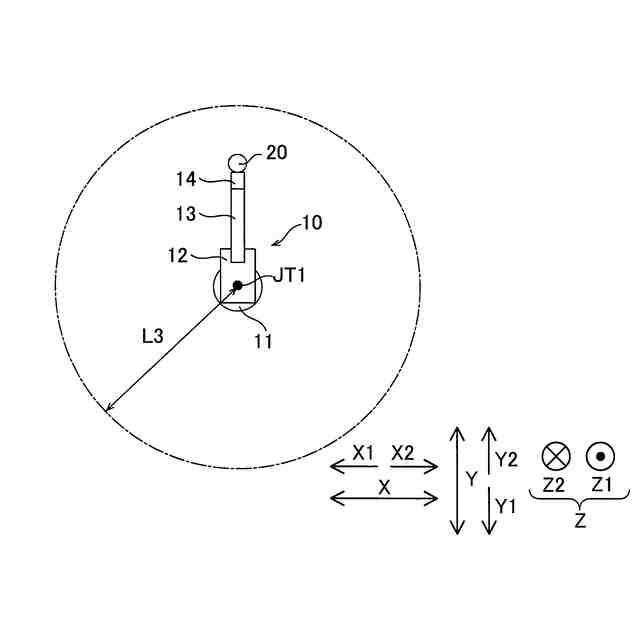
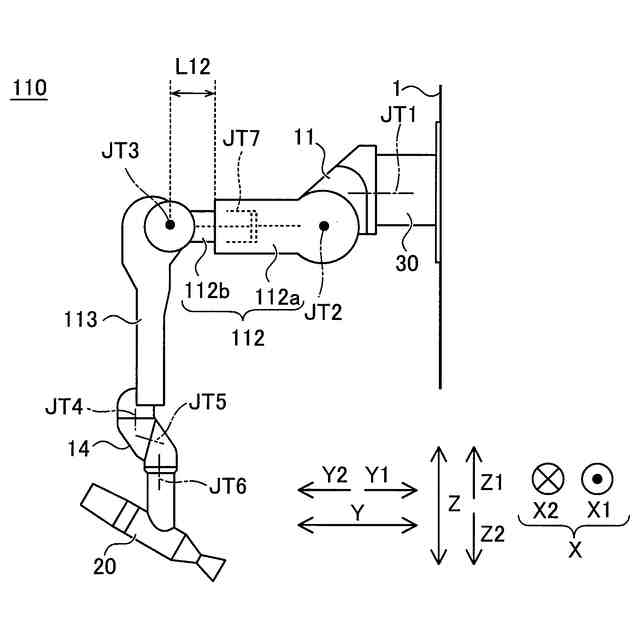
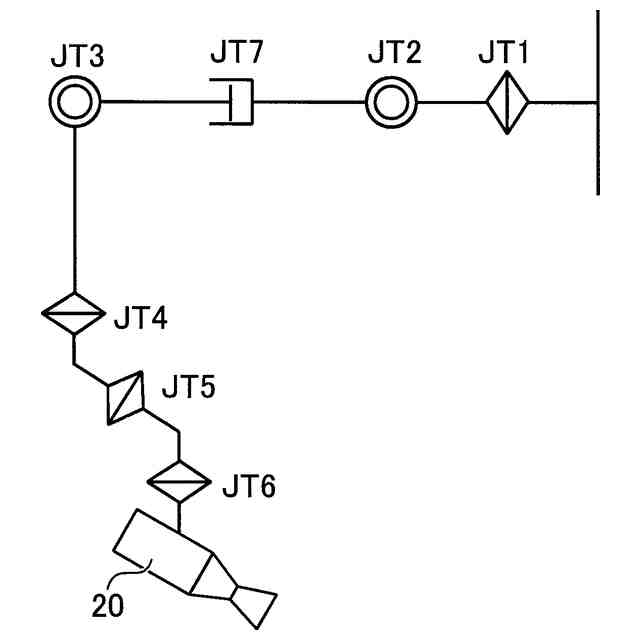
【解決手段】この塗装ロボットシステム100は、ワーク200に対して塗装作業を実行する垂直多関節型の複数の塗装ロボット10を備える。複数の塗装ロボット10のうちの少なくとも1つは、基端アーム部12と、基端が基端アーム部12に接続される先端アーム部13と、基端が先端アーム部13に接続され、先端に塗装器具20が取り付けられる手首部14と、基端アーム部12と先端アーム部13とのうちの少なくとも一方に配置され、基端アーム部12と先端アーム部13とのうちの少なくとも一方を伸縮するJT7関節と、を含む。
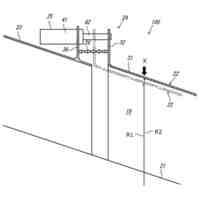
【選択図】図2
特許請求の範囲
【請求項1】
ワークに対して塗装作業を実行する垂直多関節型の複数のロボットを備え、
前記複数のロボットのうちの少なくとも1つは、
基端アーム部と、
基端が前記基端アーム部に接続される先端アーム部と、
基端が前記先端アーム部に接続され、先端に塗装器具が取り付けられる手首部と、
前記基端アーム部と前記先端アーム部とのうちの少なくとも一方に配置され、前記基端アーム部と前記先端アーム部とのうちの少なくとも一方を伸縮する伸縮軸と、を含む、塗装ロボットシステム。
続きを表示(約 1,000 文字)
【請求項2】
前記複数のロボットのうちの少なくとも1つは、前記伸縮軸を有する7軸の垂直多関節型のロボットを含む、請求項1に記載の塗装ロボットシステム。
【請求項3】
前記複数のロボットの各々は、前記伸縮軸を含む、請求項1に記載の塗装ロボットシステム。
【請求項4】
前記ワークは、所定の方向に沿って複数配置され、
前記ワークに対して塗装作業が実行される際に、前記複数のロボットは、各々、前記ワーク同士の間において前記伸縮軸の伸縮量が調整された状態で前記ワークに対して塗装作業を実行する、請求項3に記載の塗装ロボットシステム。
【請求項5】
前記ロボットは、前記基端アーム部の基端が接続され、前記基端アーム部を所定の軸線周りに回転させる基台部を含み、
並んで配置された前記ロボット同士の間隔は、前記伸縮軸が縮んだ状態において、前記所定の軸線から前記ロボットの可動範囲の端部までの距離以下である、請求項4に記載の塗装ロボットシステム。
【請求項6】
前記ロボットは、前記所定の方向に沿って複数配置されている、請求項4に記載の塗装ロボットシステム。
【請求項7】
前記先端アーム部は、
基端が前記基端アーム部に接続される先端アーム基端部分と、先端が前記手首部に接続され前記先端アーム基端部分に対して前記伸縮軸により移動される先端アーム先端部分と、を有する、請求項1に記載の塗装ロボットシステム。
【請求項8】
前記先端アーム部の最大の伸長量は、前記先端アーム部が縮んだ状態での前記先端アーム先端部分の長さよりも大きい、請求項7に記載の塗装ロボットシステム。
【請求項9】
前記ロボットは、前記基端アーム部の基端が接続され、前記基端アーム部を所定の軸線周りに回転させる基台部を含み、
前記基端アーム部は、
基端が前記基台部に接続される基端アーム基端部分と、先端が前記先端アーム部に接続され前記基端アーム基端部分に対して前記伸縮軸により移動される基端アーム先端部分と、を有する、請求項1に記載の塗装ロボットシステム。
【請求項10】
前記基端アーム部の最大の伸長量は、前記基端アーム部が縮んだ状態での前記基端アーム先端部分の長さよりも大きい、請求項9に記載の塗装ロボットシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この開示は、塗装ロボットシステムおよびロボットに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来、塗装などの作業を実行するロボットが開示されている。特許文献1には、7軸の垂直多関節ロボットが開示されている。特許文献1の7軸の垂直多関節ロボットは、ベース部と、下部アーム部と、上部アーム部と、手首部と、を備えている。また、特許文献1では、上部アーム部と手首部との間に、互いに屈曲する第1アームと第2アームとが配置されている。すなわち、特許文献1の7軸の垂直多関節ロボットは、従来の6軸の垂直多関節ロボットに対して、第1アームと第2アームとを屈曲するための7軸目としての関節が追加されている。
【先行技術文献】
【特許文献】
【0003】
特開2018-183843号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示されている7軸の垂直多関節ロボットは、7軸目の関節を折り曲げることにより、従来の6軸の垂直多関節ロボットに比べて大きさがコンパクトになる。このため、複数の7軸の垂直多関節ロボットを配置する場合、7軸の垂直多関節ロボット同士の干渉を避けながら、7軸の垂直多関節ロボット同士を密に配置することができる。その結果、7軸の垂直多関節ロボットが配置される配置領域を小さくすることが可能になる。しかしながら、特許文献1の7軸の垂直多関節ロボットでは、第1アームと第2アームとが屈曲する一方、第1アームと第2アームとの全長は変わらないため、7軸の垂直多関節ロボット同士の間隔を小さくしすぎると、7軸の垂直多関節ロボット同士が干渉してしまう。そこで、より小さな配置領域に配置することが可能な垂直多関節ロボットが望まれている。
【0005】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、より小さな配置領域に配置することが可能な塗装ロボットシステムおよびロボットを提供することである。
【課題を解決するための手段】
【0006】
この開示の第1の局面による塗装ロボットシステムは、ワークに対して塗装作業を実行する垂直多関節型の複数のロボットを備え、複数のロボットのうちの少なくとも1つは、基端アーム部と、基端が基端アーム部に接続される先端アーム部と、基端が先端アーム部に接続され、先端に塗装器具が取り付けられる手首部と、基端アーム部と先端アーム部とのうちの少なくとも一方に配置され、基端アーム部と先端アーム部とのうちの少なくとも一方を伸縮する伸縮軸と、を含む。
【0007】
この開示の第1の局面による塗装ロボットシステムは、上記のように、基端アーム部と先端アーム部とのうちの少なくとも一方に配置され、基端アーム部と先端アーム部とのうちの少なくとも一方を伸縮する伸縮軸を含む。これにより、基端アーム部と先端アーム部とのうちの少なくとも一方が縮むので、基端アーム部と先端アーム部とのうちの少なくとも一方の全長が小さくなる。このため、基端アーム部と先端アーム部とのうちの少なくとも一方が屈曲する場合と比べて、ロボット同士の干渉をより抑制できる。その結果、ロボット同士をより密に配置することができるので、より小さな配置領域にロボットを配置することができる。また、基端アーム部と先端アーム部とのうちの少なくとも一方が比較的短い場合でも、伸縮軸によって基端アーム部と先端アーム部とのうちの少なくとも一方を伸長することにより、遠方のワークに対して塗装作業を実行することができる。
【0008】
この開示の第2の局面によるロボットは、ワークに対して塗装作業を実行する垂直多関節型のロボットであって、ロボットは、基端アーム部と、基端が基端アーム部に接続される先端アーム部と、基端が先端アーム部に接続され、先端に塗装器具が取り付けられる手首部と、先端アーム部に配置され、先端アーム部を伸縮する伸縮軸と、を含む。
【0009】
この開示の第2の局面によるロボットは、上記のように、先端アーム部に配置され、先端アーム部を伸縮する伸縮軸を含む。これにより、先端アーム部が縮むので、先端アーム部の全長が小さくなる。このため、先端アーム部が屈曲する場合と比べて、ロボット同士の干渉をより抑制できる。その結果、ロボット同士をより密に配置することができるので、より小さな配置領域に配置可能なロボットを提供できる。
【発明の効果】
【0010】
本開示によれば、塗装ロボットを、より小さな配置領域に配置することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
加工機
1日前
川崎重工業株式会社
ガスタービンエンジン
1日前
川崎重工業株式会社
ガスタービンエンジンの軸受構造
1日前
川崎重工業株式会社
液化ガスの荷役方法および荷役装置
1日前
川崎重工業株式会社
エネルギーマネジメントシステム及び方法
2日前
川崎重工業株式会社
発電機及びこれを備えるガスタービンエンジン
1日前
川崎重工業株式会社
情報処理方法、情報処理装置、及びプログラム
3日前
川崎重工業株式会社
加工機および加工方法
1日前
個人
木製ハンマー
4か月前
個人
関節モジュール
3か月前
個人
寸切りボルト回し
3か月前
個人
スロットルトリガー
4か月前
中国電力株式会社
腰袋
7か月前
株式会社エビス
連結具
15日前
太陽工業株式会社
チャック装置
3か月前
コクヨ株式会社
補助器具
3か月前
日東工器株式会社
動力工具
4か月前
日東工器株式会社
動力工具
4か月前
日東工器株式会社
動力工具
4か月前
日東工器株式会社
衝撃工具
6か月前
日東工器株式会社
動力工具
4か月前
川崎重工業株式会社
ロボット
29日前
個人
メンテナンス用スタンド
5か月前
株式会社マキタ
動力工具
7か月前
東京計器株式会社
接触検知装置
4か月前
CKD株式会社
把持装置
4か月前
株式会社マキタ
打撃工具
22日前
株式会社マキタ
電動工具
22日前
トヨタ自動車株式会社
ロボット
4か月前
オムロン株式会社
電動把持工具
3か月前
学校法人立命館
グリッパ
3か月前
川崎重工業株式会社
罫書用治具
6か月前
株式会社マキタ
打撃工具
1か月前
個人
回転工具およびバリ取り部品
4か月前
株式会社ダイヘン
制御装置
1か月前
株式会社ハーモ
開閉チャック装置
5か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ