TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024175924
公報種別
公開特許公報(A)
公開日
2024-12-19
出願番号
2023094028
出願日
2023-06-07
発明の名称
異常判定システム、異常判定方法、プログラム
出願人
日本電気株式会社
代理人
個人
主分類
G08G
5/00 20060101AFI20241212BHJP(信号)
要約
【課題】乗っ取り等による移動体の移動を早期に発見可能な異常判定システム等を提供する。
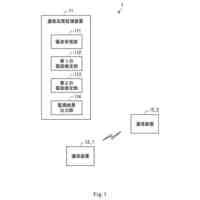
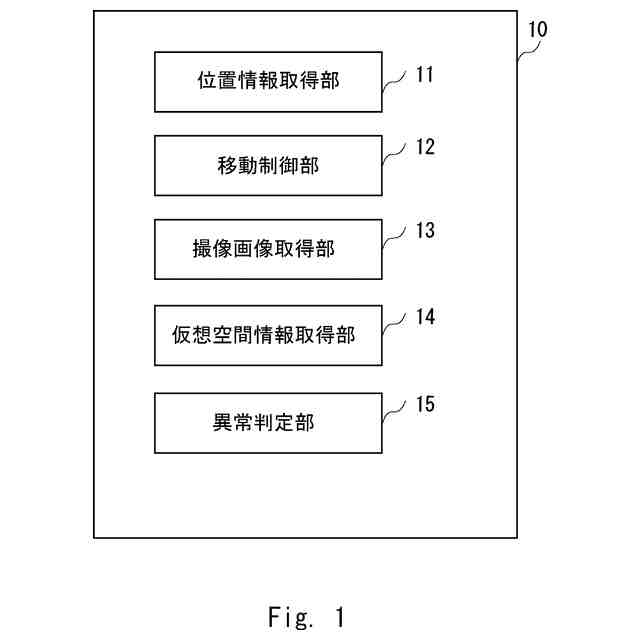
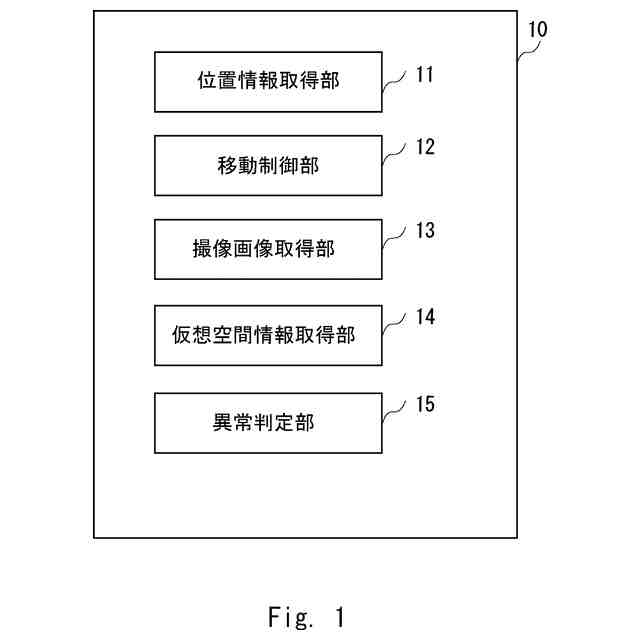
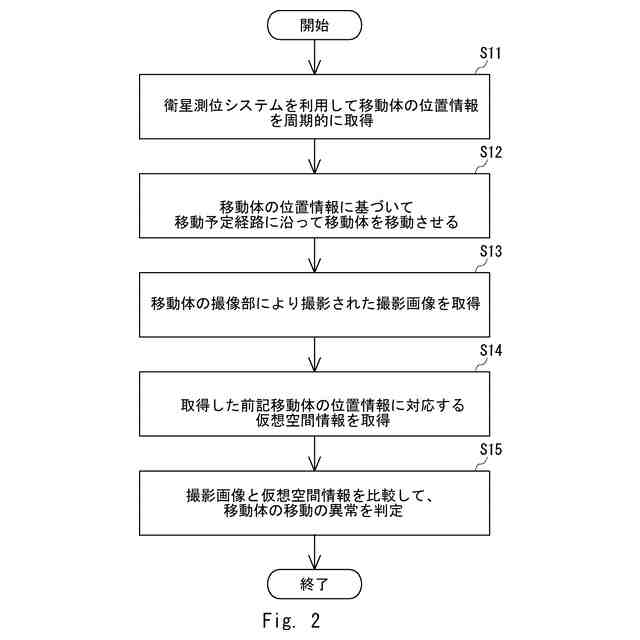
【解決手段】異常判定システム1は衛星測位システムを利用して移動体の位置情報を周期的に取得する位置情報取得部11と、取得した前記移動体の位置情報に基づいて予め定められた移動予定経路に沿って前記移動体を移動させる移動制御部12と、移動体に搭載された撮像部により撮影された、移動中の前記移動体からの視点の撮影画像を取得する撮影画像取得部13と、移動予定経路に基づき作成された仮想空間データから、取得した前記移動体の位置情報に対応する仮想空間情報を取得する仮想空間情報取得部14と、撮影画像と仮想空間情報を比較して、移動体の移動の異常を判定する異常判定部15と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
衛星測位システムを利用して移動体の位置情報を周期的に取得する位置情報取得手段と、
取得した前記移動体の位置情報に基づいて予め定められた移動予定経路に沿って前記移動体を移動させる移動制御手段と、
前記移動体に搭載された撮像部により撮影された、移動中の前記移動体からの視点の撮影画像を取得する撮影画像取得手段と、
前記移動予定経路に基づき作成された仮想空間データから、取得した前記移動体の位置情報に対応する仮想空間情報を取得する仮想空間情報取得手段と、
前記撮影画像と前記仮想空間情報を比較して、前記移動体の移動の異常を判定する異常判定手段と、を備える、異常判定システム。
続きを表示(約 1,300 文字)
【請求項2】
前記異常判定手段は、所定の時間にわたって、前記撮影画像と前記仮想空間情報を比較して、ずれ量が閾値以上に徐々に拡大する場合には、測位による移動体の位置情報を捏造した移動の異常と判定する、請求項1に記載の異常判定システム。
【請求項3】
前記異常判定手段は、前記撮影画像と前記仮想空間データを比較して、前記撮影画像から特定された前記移動体の実際の位置が、前記移動予定経路から閾値以上外れた場合は、測位による移動体の位置情報を捏造した移動の異常と判定する、請求項1に記載の異常判定システム。
【請求項4】
前記異常判定手段は、前記撮影画像と前記仮想空間情報とを比較して、前記撮影画像から特定された、前記移動体の実際の位置が経時的に、前記移動体が建物、他の移動体、又は群衆に向かっている場合、移動の異常と判定する、請求項1に記載の異常判定システム。
【請求項5】
前記異常判定手段は、測位による移動体の位置情報が前記移動予定経路にしたがっている場合は、測位による移動体の位置情報を捏造した移動の異常と判定する、請求項4に記載の異常判定システム。
【請求項6】
前記移動体の移動の異常を判定した場合にアラートを発生する発生手段を備える、請求項1に記載の異常判定システム。
【請求項7】
前記仮想空間情報は、ランドマークとなる少なくとも1つ以上の3Dオブジェクトを含む、請求項1に記載の異常判定システム。
【請求項8】
前記移動体は、カメラ及び測位信号受信機を備える飛行体であり、
前記撮影画像と前記仮想空間データを比較して、前記移動体の移動の異常を判定する前記異常判定手段を備える地上の管理サーバを更に備える、請求項1に記載の異常判定システム。
【請求項9】
衛星測位システムを利用して移動体の位置情報を周期的に取得し、
取得した前記移動体の位置情報に基づいて予め定められた移動予定経路に沿って前記移動体を移動させ、
前記移動体に搭載された撮像部により撮影された、移動中の前記移動体からの視点の撮影画像を取得し、
前記移動予定経路に基づき作成された仮想空間データから、取得した前記移動体の位置情報に対応する仮想空間情報を取得し、
前記撮影画像と前記仮想空間情報を比較して、前記移動体の移動の異常を判定する、異常判定方法。
【請求項10】
衛星測位システムを利用して移動体の位置情報を周期的に取得し、
取得した前記移動体の位置情報に基づいて予め定められた移動予定経路に沿って前記移動体を移動させ、
前記移動体に搭載された撮像部により撮影された、移動中の前記移動体からの視点の撮影画像を取得し、
前記移動予定経路に基づき作成された仮想空間データから、取得した前記移動体の位置情報に対応する仮想空間情報を取得し、
前記撮影画像と前記仮想空間情報を比較して、前記移動体の移動の異常を判定することを、コンピュータに実行させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は異常判定システム、異常判定方法、プログラムに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
特許文献1には、軽い計算負荷で、外部信号に依らずに移動体の自機位置を高精度に計測するため、移動体に搭載され、当該移動体の自機位置を計測する自機位置計測装置が開示されている。この自機位置計測装置は、情報取得手段により取得された情報を、情報生成手段により生成された複数の参照点の各々における推定情報と照合し、最も一致度の高い推定情報に対応する一の参照点の位置を抽出する位置抽出手段と、位置抽出手段により抽出された一の参照点の位置に基づいて、慣性航法装置による航法と、前記一の参照点の位置を求める航法とを含むもののうち、より航法誤差の小さいものを、前記自機位置を計測する航法として選択する航法選択手段と、を備える。
【先行技術文献】
【特許文献】
【0003】
特開2019-035670号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ドローンなどの無人機を含む移動体が普及してくると、移動体の乗っ取りも発生するおそれがある。移動体の乗っ取りが発生した場合、偽の位置情報を発信し、移動体が飛行計画通りに飛行していると偽装されるおそれがある。そのため、乗っ取りの発見が遅れ、予測できない事故等が発生してしまう場合がある。
【0005】
本開示は、このような問題点を解決するためになされたものであり、乗っ取り等による移動体の移動の異常を早期に発見可能な異常判定システム等を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の一態様にかかる異常判定システムは、
衛星測位システムを利用して移動体の位置情報を周期的に取得する位置情報取得手段と、
取得した前記移動体の位置情報に基づいて予め定められた移動予定経路に沿って前記移動体を移動させる移動制御手段と、
前記移動体に搭載された撮像部により撮影された、移動中の前記移動体からの視点の撮影画像を取得する撮影画像取得手段と、
前記移動予定経路に基づき作成された仮想空間データから、取得した前記移動体の位置情報に対応する仮想空間情報を取得する仮想空間情報取得手段と、
前記撮影画像と前記仮想空間情報を比較して、前記移動体の移動の異常を判定する異常判定手段と、を備える。
【0007】
本開示の一態様にかかる異常判定方法は、
衛星測位システムを利用して移動体の位置情報を周期的に取得し、
取得した前記移動体の位置情報に基づいて予め定められた移動予定経路に沿って前記移動体を移動させ、
前記移動体に搭載された撮像部により撮影された、移動中の前記移動体からの視点の撮影画像を取得し、
前記移動予定経路に基づき作成された仮想空間データから、取得した前記移動体の位置情報に対応する仮想空間情報を取得し、
前記撮影画像と前記仮想空間情報を比較して、前記移動体の移動の異常を判定する。
【0008】
本開示の一態様にかかるプログラムは、
衛星測位システムを利用して移動体の位置情報を周期的に取得し、
取得した前記移動体の位置情報に基づいて予め定められた移動予定経路に沿って前記移動体を移動させ、
前記移動体に搭載された撮像部により撮影された、移動中の前記移動体からの視点の撮影画像を取得し、
前記移動予定経路に基づき作成された仮想空間データから、取得した前記移動体の位置情報に対応する仮想空間情報を取得し、
前記撮影画像と前記仮想空間情報を比較して、前記移動体の移動の異常を判定することを、コンピュータに実行させる。
【発明の効果】
【0009】
本開示によれば、乗っ取り等による移動体の移動を早期に発見可能な異常判定システム等を提供することができる。
【図面の簡単な説明】
【0010】
一実施形態にかかる異常判定システムの構成例を示すブロック図である。
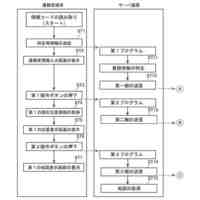
一実施形態にかかる異常判定方法を示すフローチャートである。
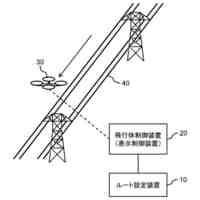
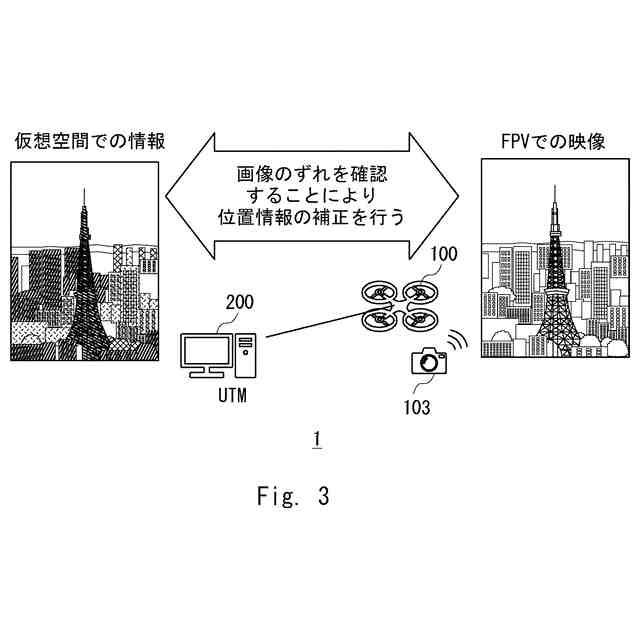
いくつかの実施の形態にかかる異常判定システムの概要を説明する図である。
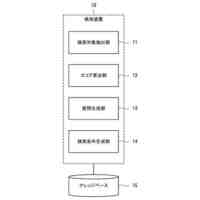
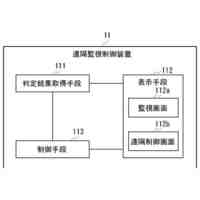
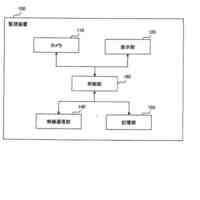
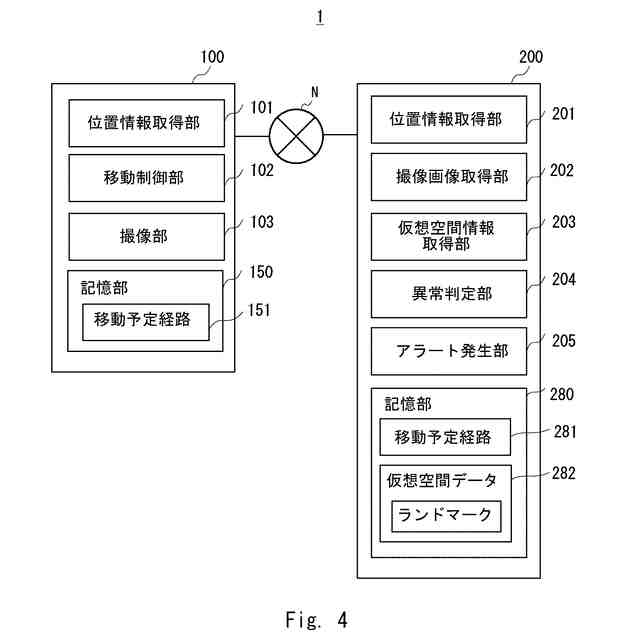
いくつかの実施の形態にかかる異常判定システムの構成を示すブロック図である。
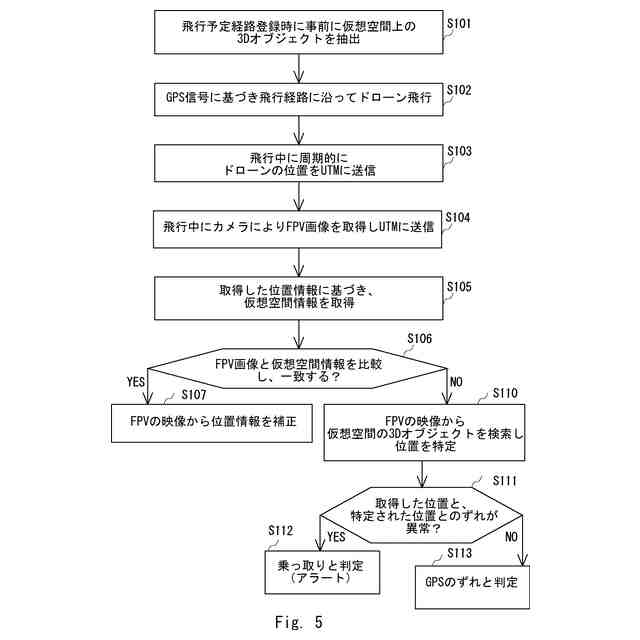
いくつかの実施の形態にかかる異常判定方法を示すフローチャートである。
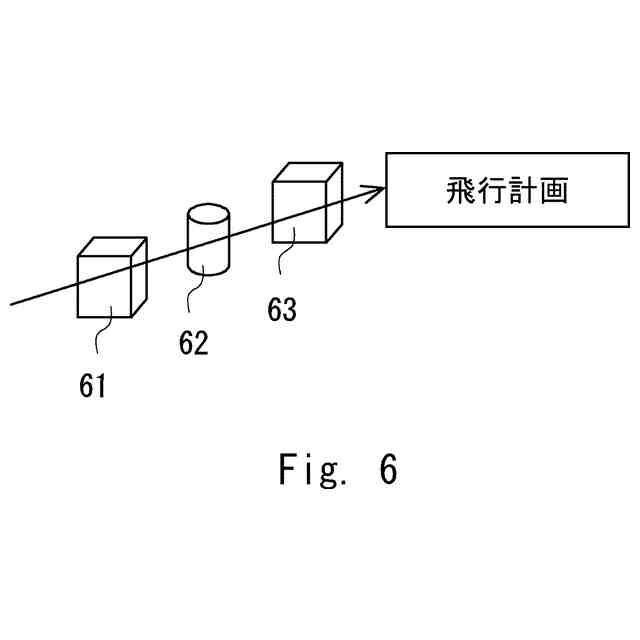
いくつかの実施の形態にかかる仮想空間データと飛行予定経路の例を説明する図である。
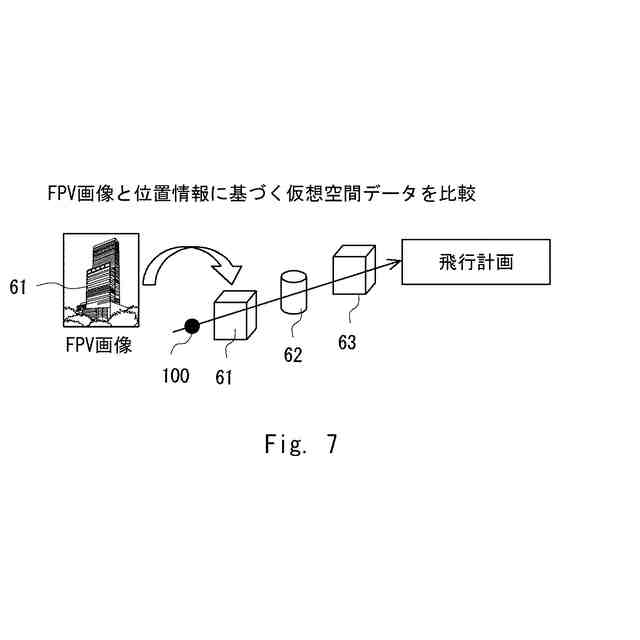
いくつかの実施の形態にかかる撮影画像と位置情報に基づく仮想空間データの比較を説明する図である。
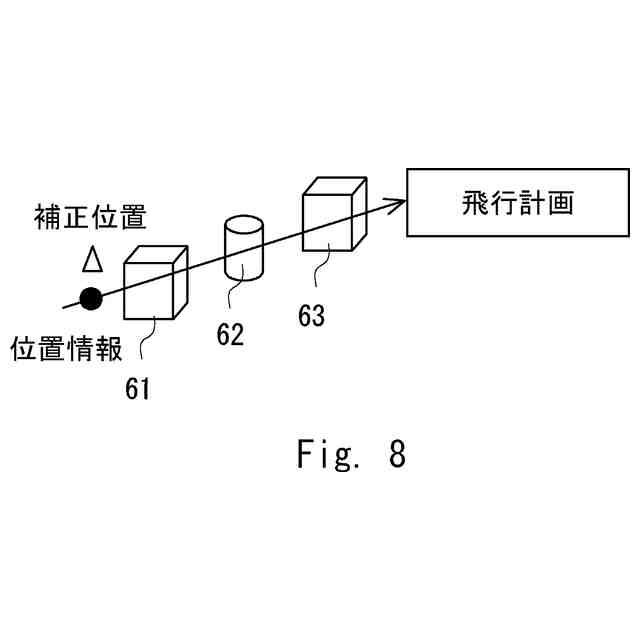
いくつかの実施の形態にかかる位置補正を説明する図である。
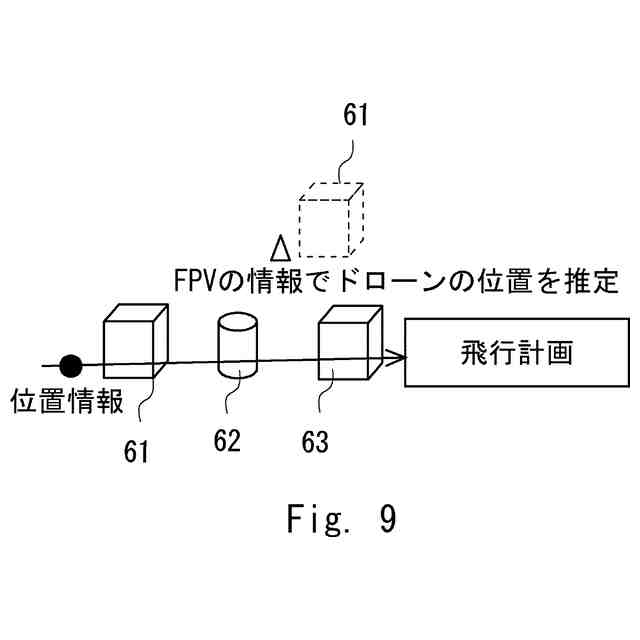
いくつかの実施形態にかかる撮影画像に基づき正確な位置の推定を説明する図である。
いくつかの実施形態にかかるGPSに起因するずれを説明する図である。
いくつかの実施形態にかかる異常と判定される位置ずれ例を説明する図である。
実際の位置特定を説明する図である。
いくつかの実施形態にかかる異常判定システムのハードウェア構成例を説明するブロック図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本電気株式会社
原子発振器
1日前
日本電気株式会社
異常予兆判定装置および異常予兆判定方法
1日前
日本電気株式会社
監視装置、監視方法およびコンピュータプログラム
2日前
日本電気株式会社
量子デバイス、発振周波数設定方法およびプログラム
1日前
日本電気株式会社
関わり提示装置、関わり提示システム、及び関わり提示方法
2日前
日本電気株式会社
通信品質監視装置、通信品質監視方法、及び、通信品質監視プログラム
1日前
日本電気株式会社
情報処理端末、情報処理プログラム、情報処理方法、及び情報処理システム
1日前
日本電気株式会社
分散再暗号化装置、暗号システム、分散再暗号化方法、分散再暗号化プログラム
1日前
日本電気株式会社
プログラム及び飛行体制御方法
2日前
日本電気株式会社
検索装置、検索方法、及びプログラム
2日前
日本電気株式会社
プログラム、追跡方法、および追跡装置
1日前
日本電気株式会社
監視装置、監視システム、方法、及びプログラム
2日前
日本電気株式会社
デブリ除去システム、ステーション衛星、デブリ除去衛星、地上制御装置、デブリ除去方法、制御方法、プログラム
1日前
個人
自動運転車
18日前
個人
火器使用警報装置
3か月前
ニッタン株式会社
煙感知器
1か月前
個人
迷子支援システム
8日前
株式会社サンライン
発炎筒携行容器
16日前
ニッタン株式会社
発信機
8日前
株式会社あおい興産
避難誘導灯
2日前
ニッタン株式会社
発信機
3か月前
株式会社大林組
誘導装置
3か月前
能美防災株式会社
表示灯カバー
1か月前
アズビル株式会社
測定システム
2か月前
ニッタン株式会社
発信機
8日前
ニッタン株式会社
煙感知器
3か月前
綜合警備保障株式会社
警備システム
3か月前
能美防災株式会社
非常放送システム
1か月前
株式会社SUBARU
運転支援装置
3か月前
日本信号株式会社
情報提供システム
2か月前
京セラ株式会社
案内システム及び案内方法
1か月前
日本無線株式会社
人物探索システム
1か月前
個人
安全に飛び乗りが可能な低速自動運転車
2か月前
京セラ株式会社
制御装置
8日前
株式会社CCT
監視装置及び監視方法
3か月前
ニッタン株式会社
火災感知端末
3か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ