TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025011202
公報種別
公開特許公報(A)
公開日
2025-01-23
出願番号
2024177065,2023090094
出願日
2024-10-09,2020-03-31
発明の名称
監視装置、監視システム、方法、及びプログラム
出願人
日本電気株式会社
代理人
個人
主分類
G08G
1/09 20060101AFI20250116BHJP(信号)
要約
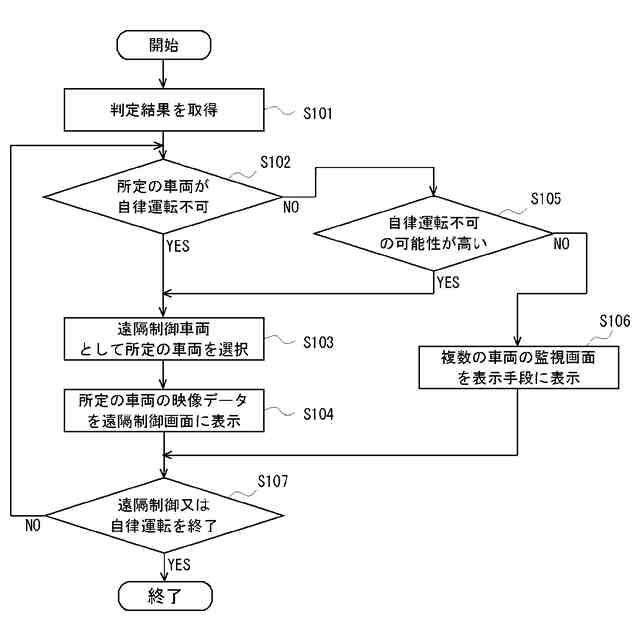
【課題】移動体を遠隔で監視制御する際の監視効率を向上させることが可能な遠隔監視制御装置、システム、方法、及びプログラムが格納される非一時的なコンピュータ可読媒体を提供する。
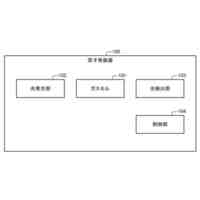
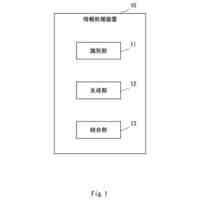
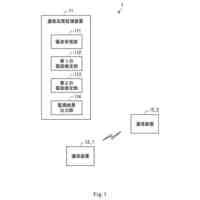
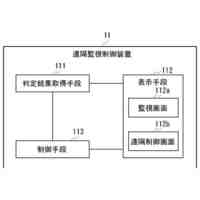
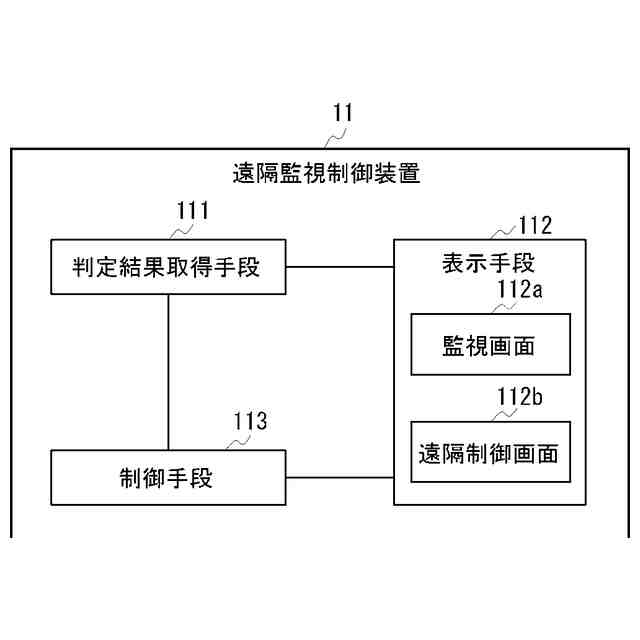
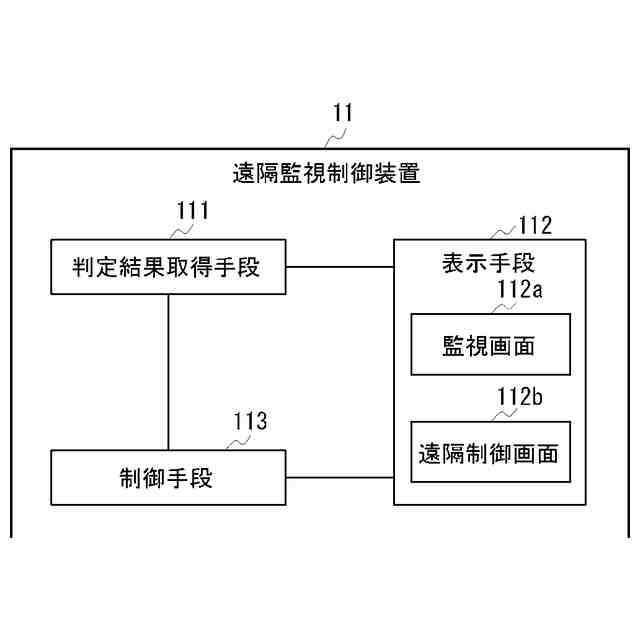
【解決手段】遠隔監視制御装置(11)は、移動体の自律運転可否を判定した判定結果を取得する判定結果取得手段(111)と、複数の移動体ごとに移動体から外部の方向を撮影した映像データを表示する監視画面(112a)と、複数の移動体から選択された遠隔制御移動体の映像データを表示する遠隔制御画面(112b)と、のうちの少なくとも1つを表示する表示手段(112)と、所定の移動体が自律運転不可と判定された場合、所定の移動体を選択し、所定の移動体の映像データを遠隔制御画面(112b)に表示し、遠隔制御画面(112b)を監視画面(112a)よりも強調して表示する制御手段(113)と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
自律運転の機能を備える移動体において外部の方向を撮影した映像データを取得する取得手段と、
複数の前記移動体の前記映像データを並べて第1の画面に表示させる制御手段と、
を備え、
前記制御手段は、複数の前記移動体のうち所定の移動体について自律運転不可の可能性が高いと判定される場合、複数の前記移動体の前記映像データを並べて表示した前記第1の画面において当該所定の移動体を強調表示させ、さらに第2の画面に当該所定の移動体の前記映像データを表示させる、
監視装置。
続きを表示(約 1,300 文字)
【請求項2】
前記制御手段は、複数の前記移動体のうち前記所定の移動体について自律運転不可の可能性が高いと判定される場合、前記第2の画面を、前記第1の画面を表示する表示手段と異なる他の表示手段に表示させる、
請求項1に記載の監視装置。
【請求項3】
前記制御手段は、複数の前記移動体のうち前記所定の移動体について自律運転不可の可能性が高いと判定される場合、同一の表示手段において、前記第1の画面を前記第2の画面に切替えて表示させる、
請求項1に記載の監視装置。
【請求項4】
前記制御手段は、所定のトリガにより、前記第1の画面を前記第2の画面に切替えて表示させる、
請求項3に記載の監視装置。
【請求項5】
前記第1の画面は、監視者が前記移動体を監視するための監視画面であり、
前記第2の画面は、監視者が前記移動体を遠隔制御するための遠隔制御画面である、
請求項1から4のいずれか1項に記載の監視装置。
【請求項6】
前記移動体の走行状態の情報を示すセンサデータに基づいて、前記移動体の自律運転不可の可能性を判定する判定手段をさらに備える、
請求項1から5のいずれか1項に記載の監視装置。
【請求項7】
移動体と監視装置とを有する監視システムであって、
前記移動体は、
自律運転の機能と、
外部の方向を撮影した映像データを取得するカメラを備え、
前記監視装置は、
前記移動体から前記映像データを取得する取得手段と、
複数の前記移動体の前記映像データを並べて第1の画面に表示させる制御手段と、を備え、
前記制御手段は、複数の前記移動体のうち所定の移動体について自律運転不可の可能性が高いと判定される場合、複数の前記移動体の前記映像データを並べて表示した前記第1の画面において当該所定の移動体を強調表示させ、さらに第2の画面に当該所定の移動体の前記映像データを表示させる、
監視システム。
【請求項8】
自律運転の機能を備える移動体において外部の方向を撮影した映像データを取得することと、
複数の前記移動体の前記映像データを並べて第1の画面に表示させることと、
複数の前記移動体のうち所定の移動体について自律運転不可の可能性が高いと判定される場合、複数の前記移動体の前記映像データを並べて表示した前記第1の画面において当該所定の移動体を強調表示させ、さらに第2の画面に当該所定の移動体の前記映像データを表示させることと、
を備える方法。
【請求項9】
自律運転の機能を備える移動体において外部の方向を撮影した映像データを取得することと、
複数の前記移動体の前記映像データを並べて第1の画面に表示させることと、
複数の前記移動体のうち所定の移動体について自律運転不可の可能性が高いと判定される場合、複数の前記移動体の前記映像データを並べて表示した前記第1の画面において当該所定の移動体を強調表示させ、さらに第2の画面に当該所定の移動体の前記映像データを表示させることと、
をコンピュータに実行させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、遠隔監視制御装置、システム、方法、及びプログラムが格納される非一時的なコンピュータ可読媒体に関するものであり、特に、移動体を遠隔で監視制御する際の監視効率を向上させることが可能な遠隔監視制御装置、システム、方法、及びプログラムが格納される非一時的なコンピュータ可読媒体に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
近年、車両の自動運転技術が盛んに開発されている。自動運転レベル4以上では、車両を運転操作する運転手は車両に乗車しない。このため、車両に何かしらの事変が起こった時に何もできない。このような事態は避けるべきであるため、自動運転システムにおいては、車両の遠隔監視や自動運転制御(遠隔監視制御)の機能が実装されることが望ましい。車両の遠隔監視制御においては、1人の監視者が複数の車両を監視する場合があるが、事変が起こった車両に注目して管理する等により、監視制御する際の監視効率を向上させる必要がある。
【0003】
特許文献1には、自動運転を実行する自動運転システムを有する車両と、オペレータを有する管制センタと、を備え、車両は、車両の周辺情報を取得する周辺センサと、自動運転が困難な場合に周辺情報の送信と共にオペレータを呼び出す呼び出し部を備え、管制センタは、オペレータが車両を遠隔操縦する遠隔操縦部と、オペレータが周辺情報に応じて車両の遠隔操縦における走行パターンを選択するためのパラメータを入力する入力部と、パラメータを用いて車両の遠隔操縦における走行パターンを複数の走行パターンの中から選択し、選択した走行パターンと周辺情報とを用いて車両の経路を生成する経路生成部と、を備える車両遠隔操作支援システムが開示されている。特許文献1は、車両を遠隔で監視制御する際の監視効率を向上させることは開示していない。
【0004】
特許文献2には、自動運転制御装置から受信した危険度をもとに自動運転車両の周囲の危険範囲を決定する危険範囲決定部が開示されている。また、特許文献2には、遠隔制御装置の表示部に、危険範囲オブジェクトが重畳されたフレーム画像が表示されることにより、危険度を直感的に把握できることが開示されている。特許文献2は、車両を遠隔で監視制御する際の監視効率を向上させることは開示していない。
【先行技術文献】
【特許文献】
【0005】
特開2019-191982号公報
国際公開第2018/155159号
【発明の概要】
【発明が解決しようとする課題】
【0006】
上述のように、車両の遠隔監視制御においては、1人の監視者が複数の車両を監視し、複数の車両のうち自動運転が困難となった車両を遠隔制御する必要がある。しかしながら、1人の監視者が複数の車両を監視しながら、複数の車両のうちの特定の車両の遠隔操作が必要か否かを判定することは難しいという課題があった。
【0007】
本開示の目的は、上述した課題を解決するためになされたものであり、特に、移動体を遠隔で監視制御する際の監視効率を向上させることが可能な遠隔監視制御装置、システム、方法、及びプログラムが格納される非一時的なコンピュータ可読媒体を提供することにある。
【課題を解決するための手段】
【0008】
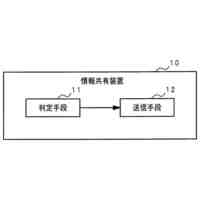
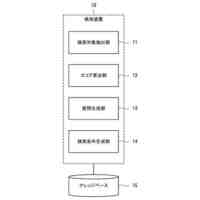
本開示に係る遠隔監視制御装置は、
移動体の自律運転可否を判定した判定結果を取得する判定結果取得手段と、
複数の前記移動体ごとに前記移動体から外部の方向を撮影した映像データを表示する監視画面と、複数の前記移動体から選択された遠隔制御移動体の前記映像データを表示する遠隔制御画面と、のうちの少なくとも1つを表示する表示手段と、
所定の移動体が自律運転不可と判定された場合、前記遠隔制御移動体として前記所定の移動体を選択し、前記所定の移動体の前記映像データを前記遠隔制御画面に表示し、前記遠隔制御画面を前記監視画面よりも強調して表示する制御手段と、
を備える。
【0009】
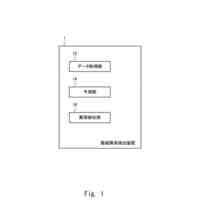
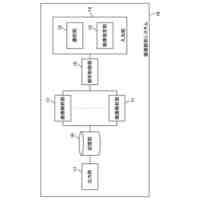
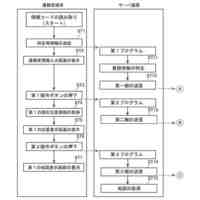
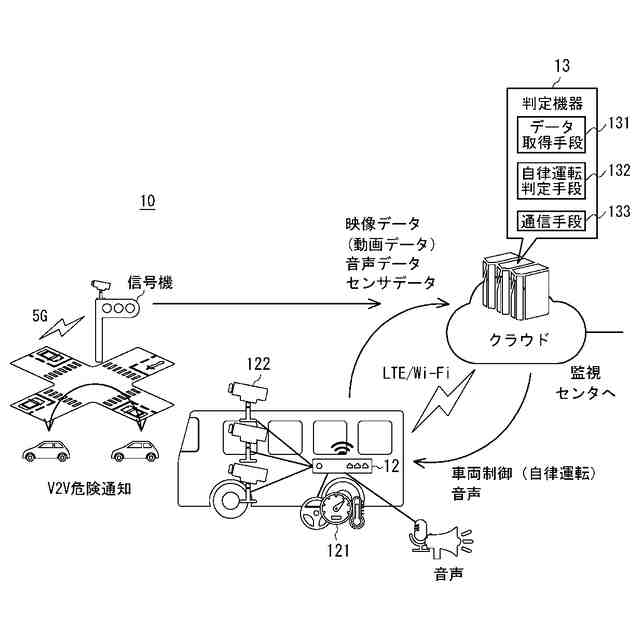
本開示に係るシステムは、
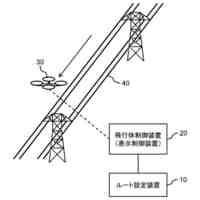
情報取得機器と判定機器と遠隔監視制御装置とを備え、
前記情報取得機器は、
移動体の走行状態の情報を示すセンサデータを取得するセンサと、
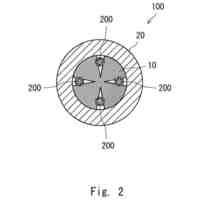
前記移動体から外部の方向を撮影した映像データを取得するカメラと、を有し、
前記判定機器は、
前記センサデータと前記映像データとを前記情報取得機器から取得するデータ取得手段と、
前記センサデータに基づいて前記移動体の自律運転可否を判定する自律運転判定手段と、
前記判定した判定結果を前記遠隔監視制御装置に送信する通信手段と、を有し、
前記遠隔監視制御装置は、
前記判定結果を前記判定機器から取得する判定結果取得手段と、
複数の前記移動体ごとに前記映像データを表示する監視画面と、複数の前記移動体から選択された遠隔制御移動体の前記映像データを表示する遠隔制御画面と、のうちの少なくとも1つを表示する表示手段と、
所定の移動体が自律運転不可と判定された場合、前記遠隔制御移動体として前記所定の移動体を選択し、前記所定の移動体の前記映像データを前記遠隔制御画面に表示し、前記遠隔制御画面を前記監視画面よりも強調して表示する制御手段と、を有する。
【0010】
本開示に係る方法は、
移動体の自律運転可否を判定した判定結果を取得することと、
複数の前記移動体ごとに前記移動体から外部の方向を撮影した映像データを監視画面に表示することと、複数の前記移動体から選択された遠隔制御移動体の前記映像データを遠隔制御画面に表示することと、のうちの少なくとも1つを行うことと、
所定の移動体が自律運転不可と判定された場合、前記遠隔制御移動体として前記所定の移動体を選択し、前記所定の移動体の前記映像データを前記遠隔制御画面に表示し、前記遠隔制御画面を前記監視画面よりも強調して表示することと、
を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本電気株式会社
原子発振器
1日前
日本電気株式会社
量子デバイスおよびその製造方法
8日前
日本電気株式会社
異常予兆判定装置および異常予兆判定方法
1日前
日本電気株式会社
検索支援装置、検索支援方法、およびプログラム
5日前
日本電気株式会社
情報処理装置、データ生成方法、及びプログラム
5日前
日本電気株式会社
監視装置、監視方法およびコンピュータプログラム
2日前
日本電気株式会社
量子デバイス、発振周波数設定方法およびプログラム
1日前
日本電気株式会社
路面異常検出装置、路面異常検出方法及びプログラム
2日前
日本電気株式会社
関わり提示装置、関わり提示システム、及び関わり提示方法
2日前
日本電気株式会社
日程調整装置、日程調整システム、日程調整方法およびプログラム
5日前
日本電気株式会社
光伝送路監視装置、光伝送路監視方法、及び、光伝送路監視プログラム
8日前
日本電気株式会社
通信品質監視装置、通信品質監視方法、及び、通信品質監視プログラム
1日前
日本電気株式会社
情報共有装置、情報共有システム、情報共有方法および情報共有プログラム
5日前
日本電気株式会社
情報処理端末、情報処理プログラム、情報処理方法、及び情報処理システム
1日前
日本電気株式会社
ファイバ素線固定構造、光海底中継器、及びファイバ素線固定構造の組立方法
5日前
日本電気株式会社
プログラム及び飛行体制御方法
2日前
日本電気株式会社
分散再暗号化装置、暗号システム、分散再暗号化方法、分散再暗号化プログラム
1日前
日本電気株式会社
検索装置、検索方法、及びプログラム
2日前
日本電気株式会社
プログラム、追跡方法、および追跡装置
1日前
日本電気株式会社
デバイス、表示方法、およびプログラム
5日前
日本電気株式会社
情報処理システム、情報処理端末、情報処理装置、情報処理方法、及び、情報処理プログラム
8日前
日本電気株式会社
監視装置、監視システム、方法、及びプログラム
2日前
日本電気株式会社
画像解析システム、プログラム及び画像解析方法
3日前
日本電気株式会社
料金徴収装置、料金徴収方法及びコンピュータプログラム
5日前
日本電気株式会社
表示制御装置、表示制御方法およびコンピュータプログラム
5日前
日本電気株式会社
デブリ除去システム、ステーション衛星、デブリ除去衛星、地上制御装置、デブリ除去方法、制御方法、プログラム
1日前
日本電気株式会社
基地局、通信端末、基地局の通信方法、通信端末の通信方法、基地局の通信プログラム、及び、通信端末の通信プログラム
5日前
日本電気株式会社
ゲート装置、出入国審査システム、ゲート装置の制御方法及びプログラム
5日前
個人
自動運転車
18日前
ニッタン株式会社
煙感知器
1か月前
個人
迷子支援システム
8日前
株式会社サンライン
発炎筒携行容器
16日前
ニッタン株式会社
発信機
8日前
能美防災株式会社
表示灯カバー
1か月前
ニッタン株式会社
発信機
8日前
株式会社あおい興産
避難誘導灯
2日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ