TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024175645
公報種別
公開特許公報(A)
公開日
2024-12-18
出願番号
2024027661
出願日
2024-02-27
発明の名称
ドライバドリル
出願人
株式会社マキタ
代理人
弁理士法人酒井国際特許事務所
主分類
B25B
21/00 20060101AFI20241211BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ドライバドリルの出力部を高トルク化すること。
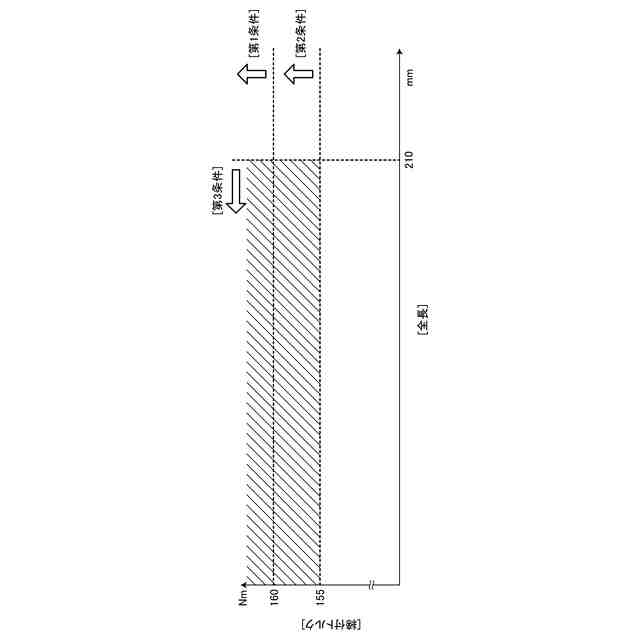
【解決手段】ドライバドリルは、ステータ及びロータを有するモータと、モータよりも前方に配置され、ロータから伝達された回転力に基づいて前後方向に延びる回転軸を中心に回転するスピンドルと、スピンドルに取り付けられるチャックと、を有する出力部と、ロータの回転を減速して、ロータよりも低い回転速度で出力部を回転させる減速機構と、を備える。出力部の最大締付トルクは、160Nm以上である。
【選択図】図27
特許請求の範囲
【請求項1】
ステータ及びロータを有するモータと、
前記モータよりも前方に配置され、前記ロータから伝達された回転力に基づいて前後方向に延びる回転軸を中心に回転するスピンドルと、前記スピンドルに取り付けられるチャックと、を有する出力部と、
前記ロータの回転を減速して、前記ロータよりも低い回転速度で前記出力部を回転させる減速機構と、を備え、
前記出力部の最大締付トルクは、160Nm以上である、
ドライバドリル。
続きを表示(約 1,700 文字)
【請求項2】
前記減速機構は、3段変速である、
請求項1に記載のドライバドリル。
【請求項3】
ステータ及びロータを有するモータと、
前記モータよりも前方に配置され、前記ロータから伝達された回転力に基づいて前後方向に延びる回転軸を中心に回転するスピンドルと、前記スピンドルに取り付けられるチャックと、を有する出力部と、
前記ロータの回転を減速して、前記ロータよりも低い回転速度で前記出力部を回転させる減速機構と、を備え、
前記減速機構は、3段変速であり、
前記出力部の最大締付トルクは、155Nm以上である、
ドライバドリル。
【請求項4】
前記モータの周囲及び後部を覆う包囲部材と、
前記包囲部材の前部に接続され前記減速機構を収容するケーシングと、を備え、
前記チャックの前端部は、前記ケーシングよりも前方に配置され、
前記包囲部材の後端部と前記チャックの前端部との前後方向の距離を示す全長は、210mm以下である、
請求項3に記載のドライバドリル。
【請求項5】
ステータ及びロータを有するモータと、
前記モータよりも前方に配置され、前記ロータから伝達された回転力に基づいて前後方向に延びる回転軸を中心に回転するスピンドルと、前記スピンドルに取り付けられるチャックと、を有する出力部と、
前記ロータの回転を減速して、前記ロータよりも低い回転速度で前記出力部を回転させる減速機構と、
前記モータの周囲及び後部を覆う包囲部材と、
前記包囲部材の前部に接続され前記減速機構を収容するケーシングと、を備え、
前記チャックの前端部は、前記ケーシングよりも前方に配置され、
前記減速機構は、3段変速であり、
前記包囲部材の後端部と前記チャックの前端部との前後方向の距離を示す全長は、210mm以下である、
ドライバドリル。
【請求項6】
前記出力部を震動させる震動機構を備え、
前記ケーシングは、前記減速機構及び前記震動機構を含む動力伝達機構を収容し、
前記モータの前後方向の寸法は、50mmであり、
前記動力伝達機構の前後方向の寸法は、90mmであり、
前記チャックの前後方向の寸法は、50mmである、
請求項5に記載のドライバドリル。
【請求項7】
前記チャックが取り付けられる前記スピンドルの外径は、9/16インチである、
請求項1から請求項6のいずれか一項に記載のドライバドリル。
【請求項8】
前記減速機構は、
前記ロータにより回転されるサンギヤの周囲に配置される複数の第1プラネタリギヤ及び複数の前記第1プラネタリギヤの周囲に配置される第1インターナルギヤからなる第1段部と、前記第1段部とは減速比が異なり、前記サンギヤの周囲に配置される複数の第2プラネタリギヤ及び複数の前記第2プラネタリギヤの周囲に配置される第2インターナルギヤからなる第2段部と、を有する第1遊星歯車機構と、
前記第1遊星歯車機構よりも前方に配置され、前記第1遊星歯車機構の回転力により作動する第2遊星歯車機構と、
前記第2遊星歯車機構よりも前方に配置され、前記第2遊星歯車機構の回転力により作動する第3遊星歯車機構と、を含み、
前記出力部は、前記第3遊星歯車機構を介して伝達される前記ロータの回転力により回転する、
請求項2から請求項5のいずれか一項に記載のドライバドリル。
【請求項9】
前記第2段部の減速比は、前記第1段部の減速比よりも大きい、
請求項8に記載のドライバドリル。
【請求項10】
前記第2遊星歯車機構の減速比及び前記第3遊星歯車機構の減速比は、前記第1段部の減速比よりも小さく、
前記第2遊星歯車機構の減速比は、前記第3遊星歯車機構の減速比よりも小さい。
請求項9に記載のドライバドリル。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本明細書で開示する技術は、ドライバドリルに関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
ドライバドリルに係る技術分野において、特許文献1に開示されているようなドライバドリルが知られている。
【先行技術文献】
【特許文献】
【0003】
特開2021-171857号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本明細書で開示する技術は、ドライバドリルの出力部を高トルク化することを目的とする。また、本明細書で開示する技術は、ドライバドリルの全長を短縮化することを目的とする。
【課題を解決するための手段】
【0005】
本明細書は、ドライバドリルを開示する。ドライバドリルは、ステータ及びロータを有するモータと、モータよりも前方に配置され、ロータから伝達された回転力に基づいて前後方向に延びる回転軸を中心に回転するスピンドルと、スピンドルに取り付けられるチャックと、を有する出力部と、ロータの回転を減速して、ロータよりも低い回転速度で出力部を回転させる減速機構と、を備えてもよい。出力部の最大締付トルクは、160Nm以上でもよい。
【0006】
また、ドライバドリルは、ステータ及びロータを有するモータと、モータよりも前方に配置され、ロータから伝達された回転力に基づいて前後方向に延びる回転軸を中心に回転するスピンドルと、スピンドルに取り付けられるチャックと、を有する出力部と、ロータの回転を減速して、ロータよりも低い回転速度で出力部を回転させる減速機構と、モータの周囲及び後部を覆う包囲部材と、包囲部材の前部に接続され減速機構を収容するケーシングと、を備えてもよい。チャックの前端部は、ケーシングよりも前方に配置されてもよい。減速機構は、3段変速でもよい。包囲部材の後端部とチャックの前端部との前後方向の距離を示す全長は、210mm以下でもよい。
【発明の効果】
【0007】
本明細書で開示する技術によれば、ドライバドリルの出力部が高トルク化される。また、本明細書で開示する技術によれば、ドライバドリルの全長が短縮化される。
【図面の簡単な説明】
【0008】
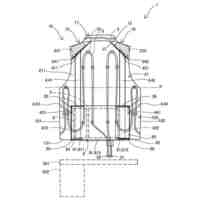
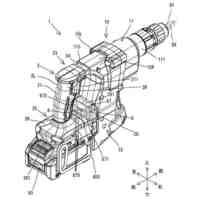
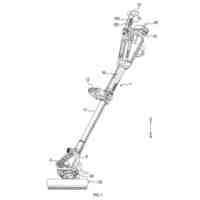
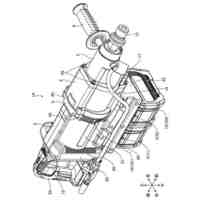
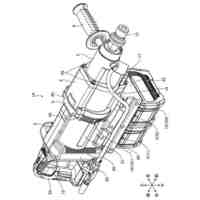
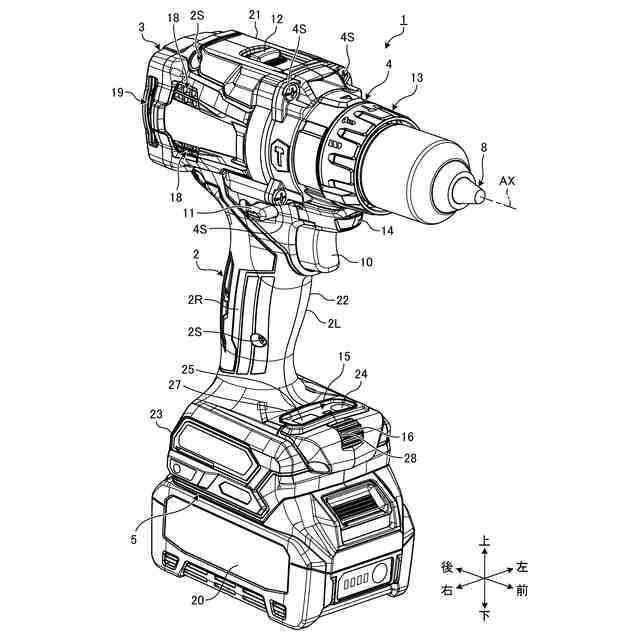
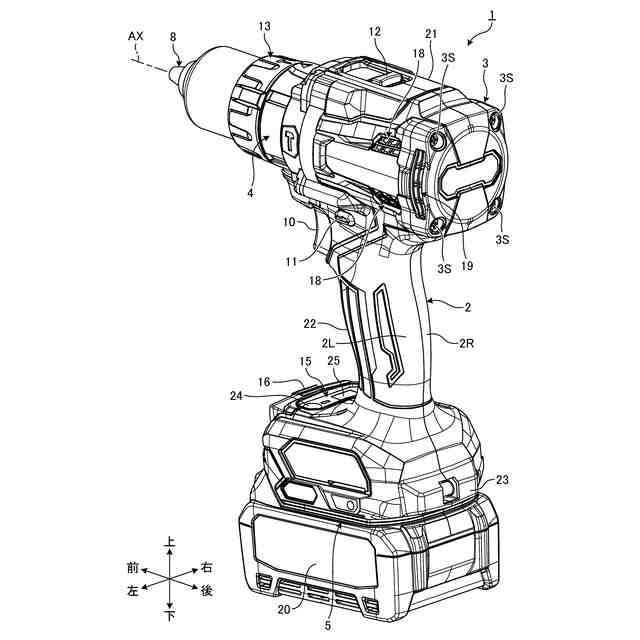
図1は、実施形態に係るドライバドリルを示す前方からの斜視図である。
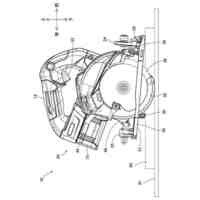
図2は、実施形態に係るドライバドリルを示す後方からの斜視図である。
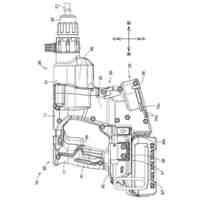
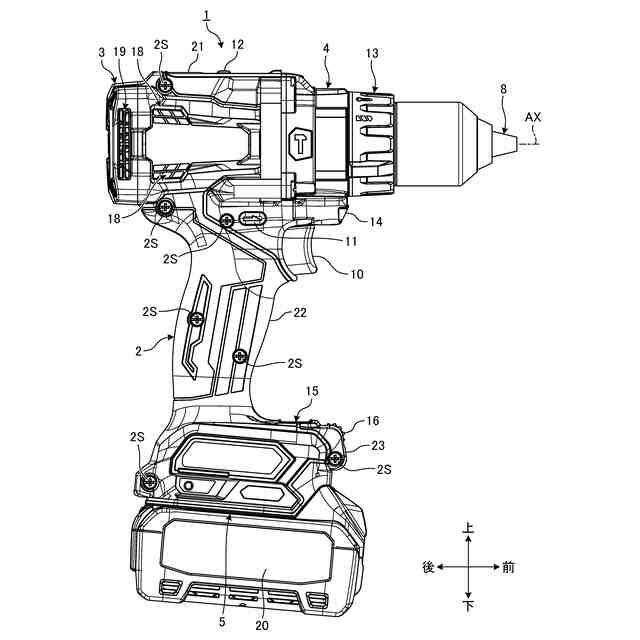
図3は、実施形態に係るドライバドリルを示す側面図である。
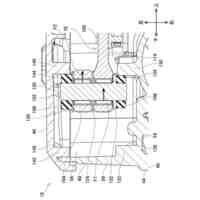
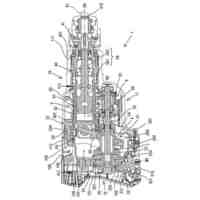
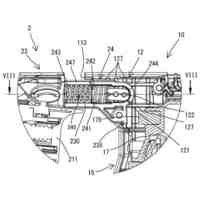
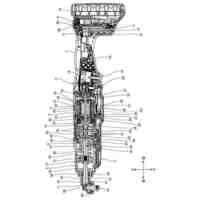
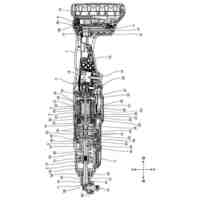
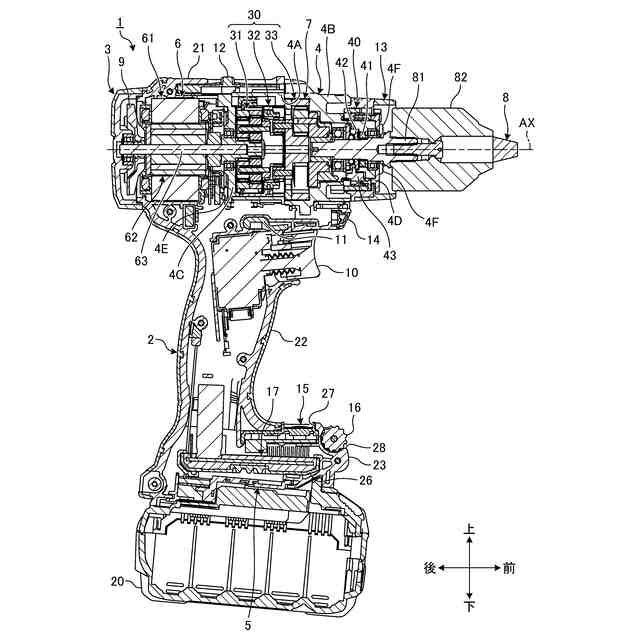
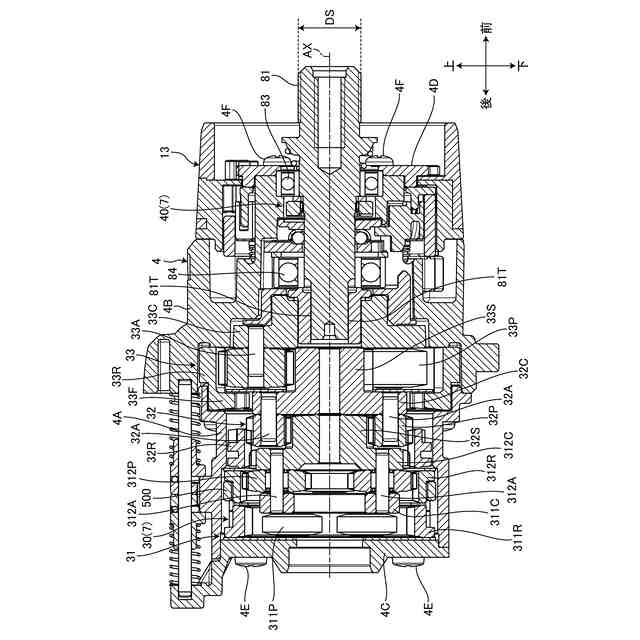
図4は、実施形態に係るドライバドリルを示す断面図である。
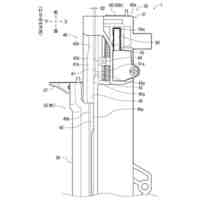
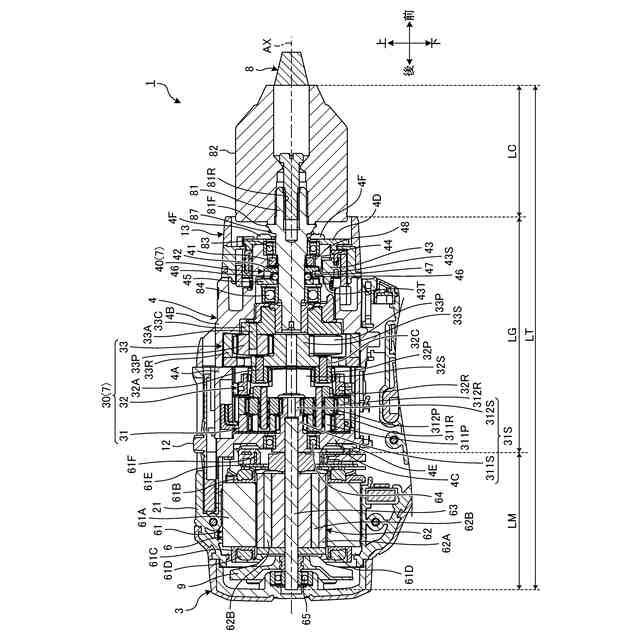
図5は、実施形態に係るドライバドリルの一部を示す断面図である。
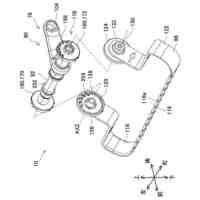
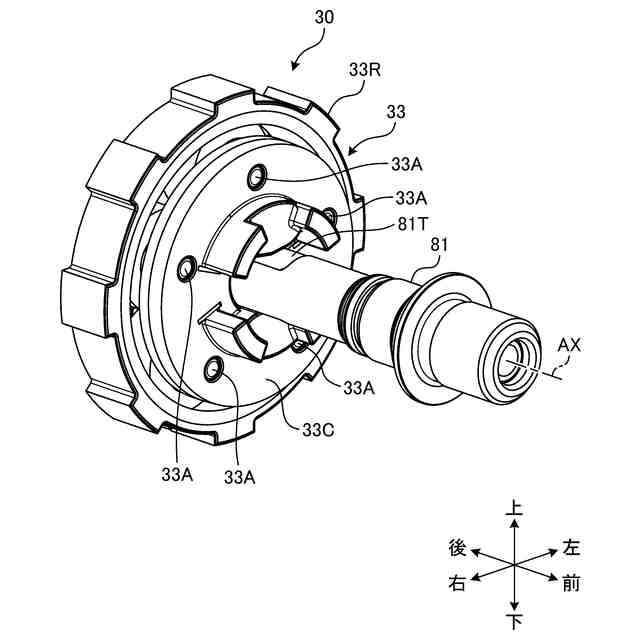
図6は、実施形態に係る減速機構の一部を示す右前方からの斜視図である。
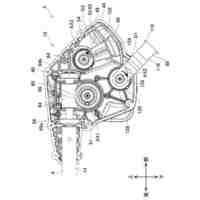
図7は、実施形態に係るドライバドリルの一部を示す前方からの斜視図である。
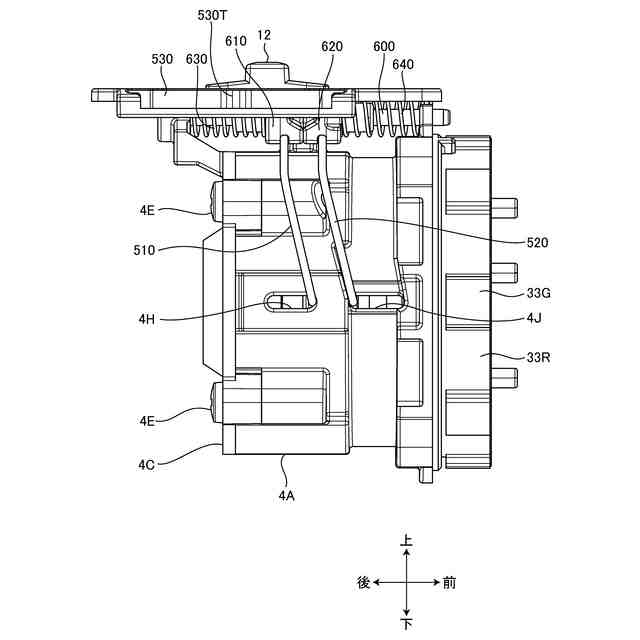
図8は、実施形態に係るドライバドリルの一部を示す側面図である。
図9は、実施形態に係るドライバドリルの一部を示す断面図である。
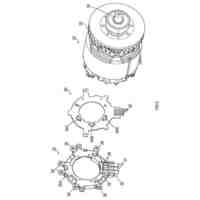
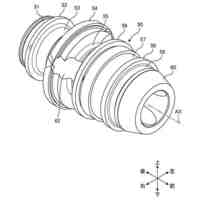
図10は、実施形態に係る減速機構を示す分解斜視図である。
図11は、実施形態に係る減速機構の一部を示す後方からの斜視図である。
図12は、実施形態に係る減速機構の一部を示す後方からの斜視破断図である。
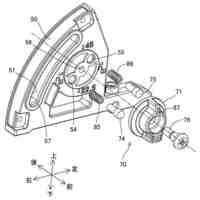
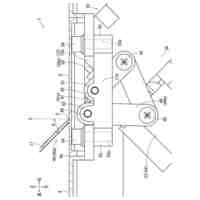
図13は、実施形態に係る第1速度切換機構及び第2速度切換機構を示す側面図である。
図14は、実施形態に係る第1速度切換機構及び第2速度切換機構を示す右下後方からの斜視図である。
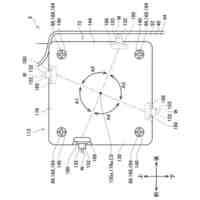
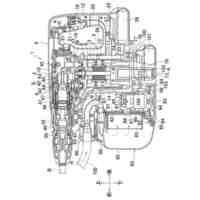
図15は、実施形態に係る減速機構が低速モード(1速)に設定されたときのドライバドリルを上方から見た図である。
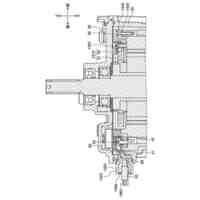
図16は、実施形態に係る減速機構が低速モード(1速)に設定されたときのドライバドリルを示す断面図である。
図17は、実施形態に係る減速機構が低速モード(1速)に設定されたときのドライバドリルを示す断面図である。
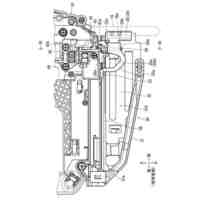
図18は、実施形態に係る減速機構が低速モード(1速)に設定されたときのドライバドリルの内部構造を示す図である。
図19は、実施形態に係る減速機構が中速モード(2速)に設定されたときのドライバドリルを上方から見た図である。
図20は、実施形態に係る減速機構が中速モード(2速)に設定されたときのドライバドリルを示す断面図である。
図21は、実施形態に係る減速機構が中速モード(2速)に設定されたときのドライバドリルを示す断面図である。
図22は、実施形態に係る減速機構が中速モード(2速)に設定されたときのドライバドリルの内部構造を示す図である。
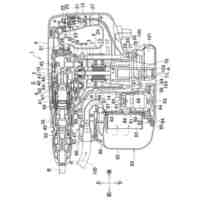
図23は、実施形態に係る減速機構が高速モード(3速)に設定されたときのドライバドリルを上方から見た図である。
図24は、実施形態に係る減速機構が高速モード(3速)に設定されたときのドライバドリルを示す断面図である。
図25は、実施形態に係る減速機構が高速モード(3速)に設定されたときのドライバドリルを示す断面図である。
図26は、実施形態に係る減速機構が高速モード(3速)に設定されたときのドライバドリルの内部構造を示す図である。
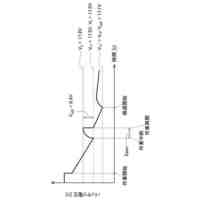
図27は、実施形態に係るドライバドリルの締付トルクと全長との関係を示す図である。
図28は、実施形態に係るドライバドリルのモータトルクとギヤ比との関係を示す図である。
図29は、実施形態に係るドライバドリルが実施可能な加工条件を説明する図である。
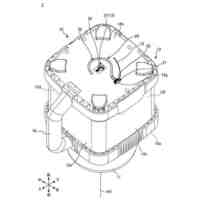
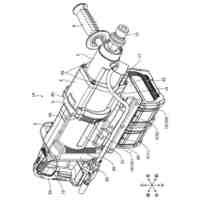
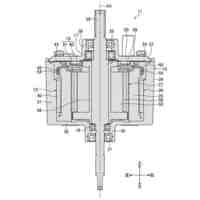
図30は、実施形態に係るモータを説明する図である。
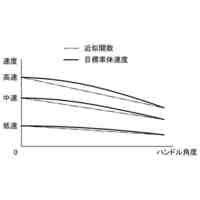
図31は、実施形態に係る定格電圧40Vバッテリ容量8Ahの第1バッテリパックを使用した場合の高速モードにおける出力部のトルクとモータ特性との関係を示すグラフの一例である。
図32は、実施形態に係る定格電圧40Vバッテリ容量8Ahの第1バッテリパックを使用した場合の中速モードにおける出力部のトルクとモータ特性との関係を示すグラフの一例である。
図33は、実施形態に係る定格電圧40Vバッテリ容量2Ahの第2バッテリパックを使用した場合の中速モードにおける出力部のトルクとモータ特性との関係を示すグラフの一例である。
【発明を実施するための形態】
【0009】
1つ又はそれ以上の実施形態において、ドライバドリルは、ステータ及びロータを有するモータと、モータよりも前方に配置され、ロータから伝達された回転力に基づいて前後方向に延びる回転軸を中心に回転するスピンドルと、スピンドルに取り付けられるチャックと、を有する出力部と、ロータの回転を減速して、ロータよりも低い回転速度で出力部を回転させる減速機構と、を備えてもよい。出力部の最大締付トルクは、160Nm以上でもよい。
【0010】
上記の構成では、ドライバドリルの出力部が高トルク化される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社マキタ
衣服
14日前
株式会社マキタ
作業機
26日前
株式会社マキタ
作業機
26日前
株式会社マキタ
作業機
26日前
株式会社マキタ
運搬車
17日前
株式会社マキタ
作業機
10日前
株式会社マキタ
打撃工具
18日前
株式会社マキタ
打撃工具
18日前
株式会社マキタ
打撃工具
18日前
株式会社マキタ
清掃装置
4日前
株式会社マキタ
清掃装置
4日前
株式会社マキタ
電気機器
1か月前
株式会社マキタ
コアドリル
17日前
株式会社マキタ
往復動工具
18日前
株式会社マキタ
往復動工具
18日前
株式会社マキタ
電動作業機
26日前
株式会社マキタ
電動作業機
26日前
株式会社マキタ
電動作業機
17日前
株式会社マキタ
コアドリル
17日前
株式会社マキタ
電動作業機
10日前
株式会社マキタ
コアドリル
17日前
株式会社マキタ
携帯用切断機
10日前
株式会社マキタ
動力ユニット
4日前
株式会社マキタ
ネジ締め工具
17日前
株式会社マキタ
作業ロボット
4日前
株式会社マキタ
テーブルソー
17日前
株式会社マキタ
打ち込み工具
14日前
株式会社マキタ
携帯用切断機
10日前
株式会社マキタ
打ち込み工具
19日前
株式会社マキタ
ドライバドリル
25日前
株式会社マキタ
グリス吐出装置
14日前
株式会社マキタ
電動式打ち込み工具
17日前
株式会社マキタ
電動式打ち込み工具
17日前
株式会社マキタ
バッテリ駆動式機器
17日前
株式会社マキタ
電動工具用集塵システム
1か月前
株式会社マキタ
電動工具用集塵システム
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ