TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024175308
公報種別
公開特許公報(A)
公開日
2024-12-18
出願番号
2023092992
出願日
2023-06-06
発明の名称
車両制御装置
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
B60W
30/08 20120101AFI20241211BHJP(車両一般)
要約
【課題】工事区間及び走行車線の区画線を跨ぐ停止車両を検出した場合に不要な減速制御の実行を抑制する。
【解決手段】自車両の走行する走行車線上で自車両の前方に停止車両を検出した場合に自車両の減速制御を行う車両制御装置であって、自車両の自動運転中に、走行車線に隣接する工事区間と走行車線との区画線を跨いで停止する車両を停止車両として検出した場合には、停止車両に対する減速制御を行わずに自車両のドライバーに手動運転の開始を求める運転操作交代要求を行う。
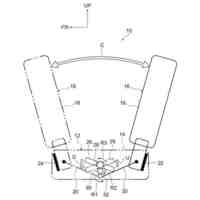
【選択図】図2
特許請求の範囲
【請求項1】
自車両の走行する走行車線上で前記自車両の前方に停止車両を検出した場合に前記自車両の減速制御を行う車両制御装置であって、
前記自車両の自動運転中に、前記走行車線に隣接する工事区間と前記走行車線との区画線を跨いで停止する車両を前記停止車両として検出した場合には、前記停止車両に対する前記減速制御を行わずに前記自車両のドライバーに手動運転の開始を求める運転操作交代要求を行う、車両制御装置。
続きを表示(約 460 文字)
【請求項2】
前記運転操作交代要求を行ってから前記ドライバーが運転操作を開始するまでの間、前記停止車両及び前記自車両の距離と前記自車両の車速とに基づいて緊急制動条件が満たされたか否かを判定し、
前記ドライバーが運転操作を開始しないまま前記緊急制動条件が満たされた場合には、前記停止車両に対する前記自車両の緊急制動制御を開始する、請求項1に記載の車両制御装置。
【請求項3】
自車両の走行する走行車線上で前記自車両の前方に停止車両を検出した場合に前記自車両の運転支援として減速制御を行う車両制御装置であって、
前記走行車線に隣接する工事区間と前記走行車線との区画線を跨いで停止する車両を前記停止車両として検出した場合には、前記停止車両に対する前記減速制御の減速開始タイミングを遅延させ、遅延中に前記停止車両をロストしたときには前記停止車両に対する前記減速制御を行わず、前記停止車両をロストせずに前記減速開始タイミングに至ったときには前記停止車両に対する前記減速制御を実行する、車両制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両制御装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来、車両制御装置に関する技術文献として、特開2022―060074号公報が知られている。この公報には、車線区画線上に設置されたパイロンが、車線区画線からはみ出している量に応じて仮想の車線を設定し、目標走行路を設定する運転支援装置が示されている。
【先行技術文献】
【特許文献】
【0003】
特開2022―060074号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
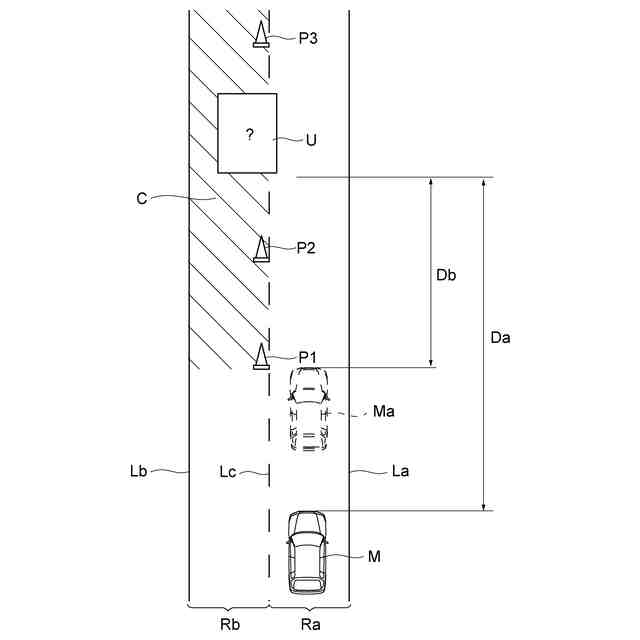
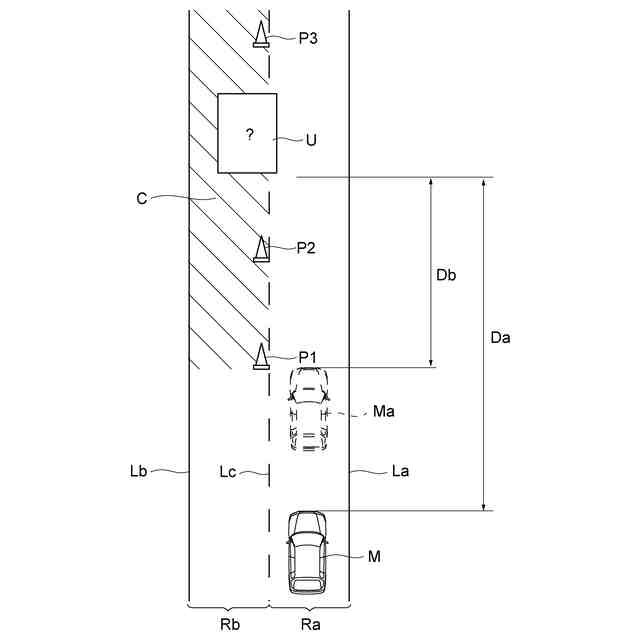
しかしながら、自車両の走行する走行車線に隣接する工事区間において、走行車線及び工事区間の区画線上に配置されたパイロンなどの工事関連用具と工事区間内の停止車両とが近接している場合、遠方の自車両からでは停止車両が区画線を跨いで存在しているように検出されることがある。この場合において、誤って自車両の減速制御が行われることで自車両のドライバーに違和感を与えるおそれがあった。
【課題を解決するための手段】
【0005】
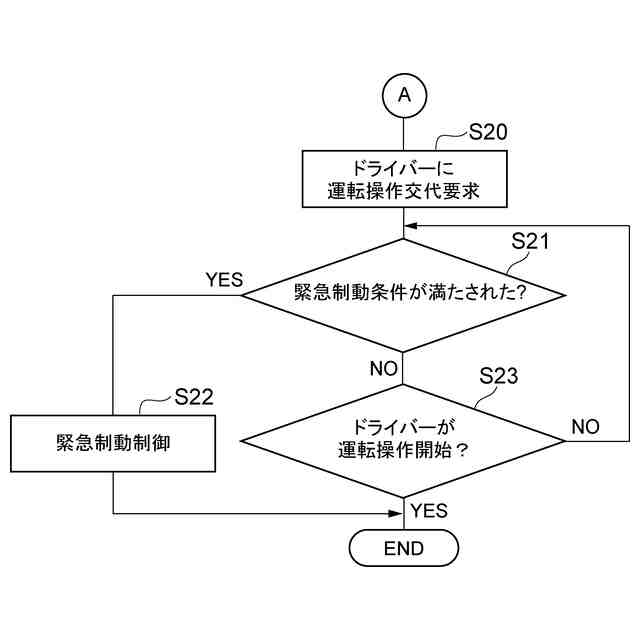
本発明の一態様は、自車両の走行する走行車線上で自車両の前方に停止車両を検出した場合に自車両の減速制御を行う車両制御装置であって、自車両の自動運転中に、走行車線に隣接する工事区間と走行車線との区画線を跨いで停止する車両を停止車両として検出した場合には、停止車両に対する減速制御を行わずに自車両のドライバーに手動運転の開始を求める運転操作交代要求を行う。
【0006】
本発明の一態様に係る車両制御装置において、運転操作交代要求を行ってからドライバーが運転操作を開始するまでの間、停止車両及び自車両の距離と自車両の車速とに基づいて緊急制動条件が満たされたか否かを判定し、ドライバーが運転操作を開始しないまま緊急制動条件が満たされた場合には、停止車両に対する自車両の緊急制動制御を開始してもよい。
【0007】
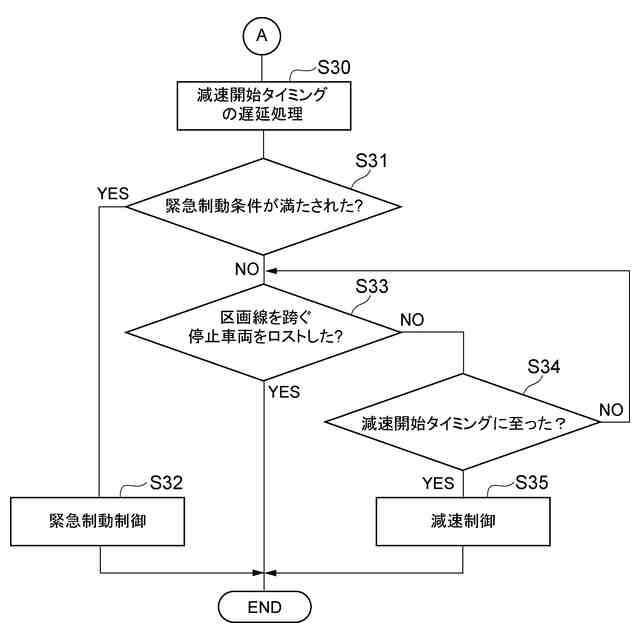
本発明の他の態様は、自車両の走行する走行車線上で自車両の前方に停止車両を検出した場合に自車両の運転支援として減速制御を行う車両制御装置であって、走行車線に隣接する工事区間と走行車線との区画線を跨いで停止する車両を停止車両として検出した場合には、停止車両に対する減速制御の減速開始タイミングを遅延させ、遅延中に停止車両をロストしたときには停止車両に対する減速制御を行わず、停止車両をロストせずに減速開始タイミングに至ったときには停止車両に対する減速制御を実行する。
【発明の効果】
【0008】
本発明の各態様によれば、工事区間及び走行車線の区画線を跨ぐ停止車両を検出した場合に不要な減速制御の実行を抑制することができる。
【図面の簡単な説明】
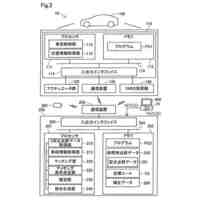
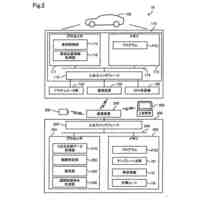
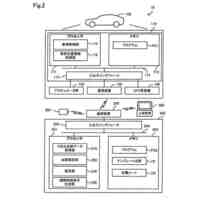
【0009】
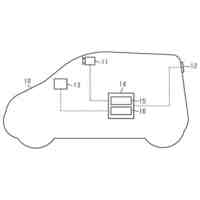
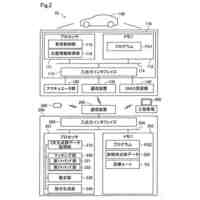
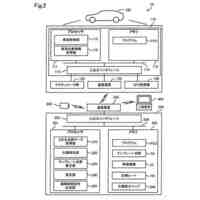
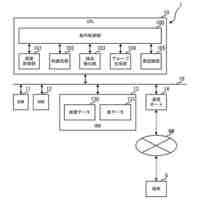
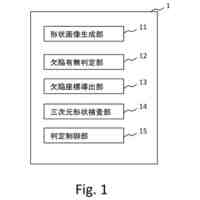
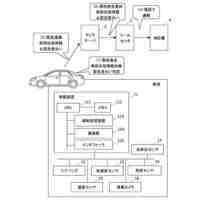
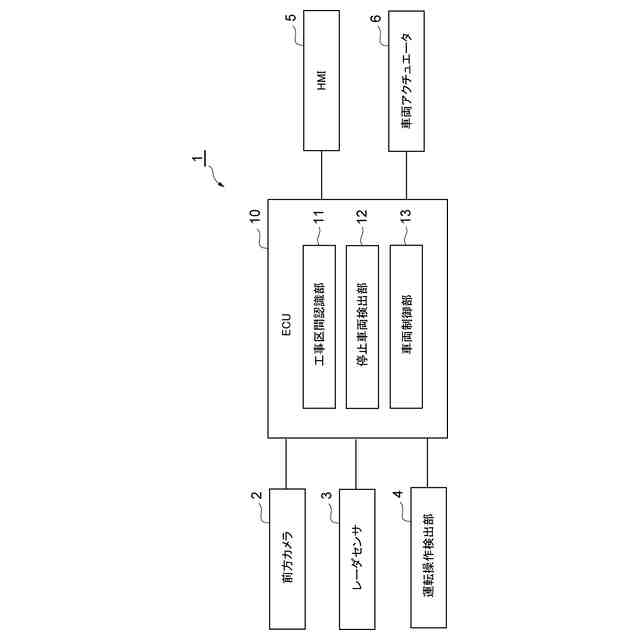
一実施形態に係る車両制御装置を示すブロック図である。
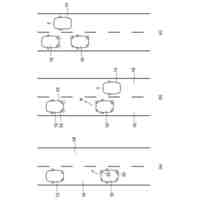
走行車線と工事区間との区画線を跨ぐ停止車両の存在を検出した状況の一例を示す平面図である。
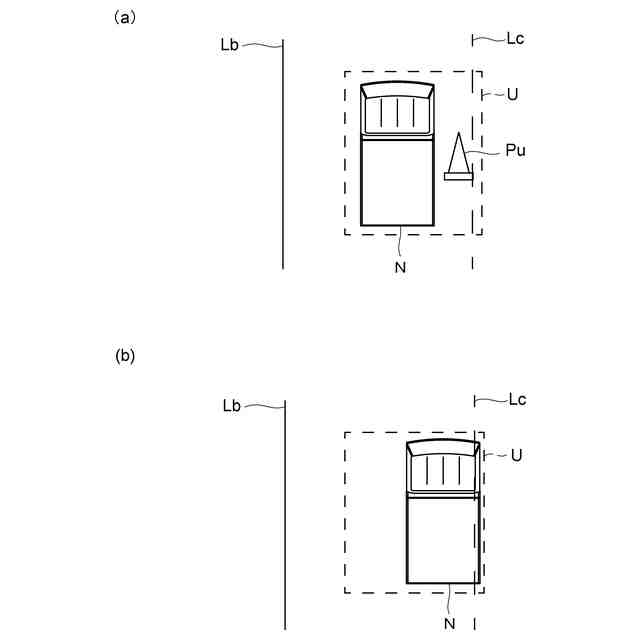
(a)走行車線と工事区間との区画線を跨ぐ停止車両が誤検出であった場合の一例を示す図である。(b)走行車線と工事区間との区画線を跨ぐ停止車両が正確に検出された場合の一例を示す図である。
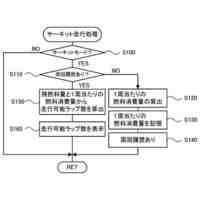
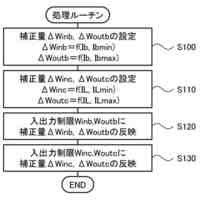
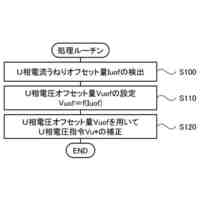
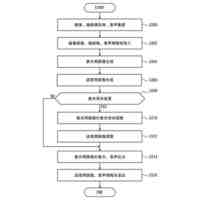
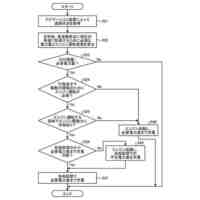
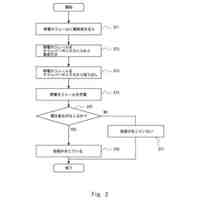
減速制御の前段処理の一例を示すフローチャートである。
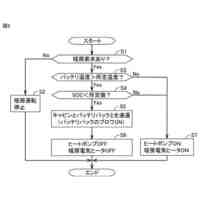
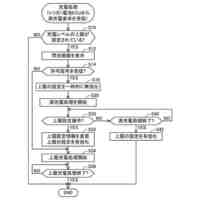
自動運転中の減速制御の後段処理の一例を示すフローチャートである。
運転支援中の減速制御の後段処理の一例を示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、本発明の実施形態について図面を参照して説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
車両
7日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
電動車
2日前
トヨタ自動車株式会社
モータ
2日前
トヨタ自動車株式会社
八方弁
1日前
トヨタ自動車株式会社
電動車
7日前
トヨタ自動車株式会社
電動車
2日前
トヨタ自動車株式会社
電動車
7日前
トヨタ自動車株式会社
駆動装置
1日前
トヨタ自動車株式会社
制御装置
1日前
トヨタ自動車株式会社
推定装置
7日前
トヨタ自動車株式会社
制御装置
7日前
トヨタ自動車株式会社
制御装置
7日前
トヨタ自動車株式会社
端末装置
2日前
トヨタ自動車株式会社
制御装置
7日前
トヨタ自動車株式会社
制御装置
7日前
トヨタ自動車株式会社
差動装置
7日前
トヨタ自動車株式会社
推定装置
7日前
トヨタ自動車株式会社
二次電池
7日前
トヨタ自動車株式会社
締結構造
1日前
トヨタ自動車株式会社
表認識装置
2日前
トヨタ自動車株式会社
シール構造
1日前
トヨタ自動車株式会社
プレス装置
7日前
トヨタ自動車株式会社
情報処理装置
2日前
トヨタ自動車株式会社
情報処理装置
2日前
トヨタ自動車株式会社
情報処理装置
2日前
トヨタ自動車株式会社
車両用シート
2日前
トヨタ自動車株式会社
電池検査装置
2日前
トヨタ自動車株式会社
車両制御装置
2日前
トヨタ自動車株式会社
情報処理装置
7日前
トヨタ自動車株式会社
走行制御装置
7日前
トヨタ自動車株式会社
短絡検知方法
7日前
トヨタ自動車株式会社
搬送システム
2日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ