TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024172828
公報種別
公開特許公報(A)
公開日
2024-12-12
出願番号
2023090826
出願日
2023-06-01
発明の名称
走行制御装置
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
主分類
B60W
30/14 20060101AFI20241205BHJP(車両一般)
要約
【課題】先行車両を追従する制御を実行中に車線変更を開始する場合に、状況に応じて自車両を早期に加速させる走行制御装置を提供する。
【解決手段】走行制御装置は、先行車両に設けられたストップランプまたは方向指示器の点灯状態を検出した結果を取得する取得部と、先行車両を追従する制御を実行中において、自車両の方向指示器をオンにする検出結果を受けて自車両の減速を抑制または自車両を加速させる走行制御部と、を備える。走行制御部は、自車両の方向指示器をオンにする検出結果を受けて自車両の減速を抑制または自車両を加速させる場合に、先行車両のストップランプの点灯または自車両の車線変更の方向と同じ方向の先行車両の方向指示器の点灯を検出すると、自車両の加速または減速の抑制を停止する。
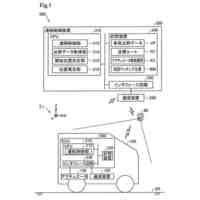
【選択図】図1
特許請求の範囲
【請求項1】
自車両の前方に位置する先行車両を追従する制御を実行可能な走行制御装置であって、
先行車両に設けられたストップランプまたは方向指示器の点灯状態を検出した結果を取得する取得部と、
先行車両を追従する制御を実行中に自車両の方向指示器をオンにする検出結果を受けると、自車両の減速を抑制または自車両を加速させる走行制御部と、を備え、
前記走行制御部は、自車両の方向指示器をオンにする検出結果を受けて自車両の減速を抑制または自車両を加速させる場合に、先行車両のストップランプの点灯または自車両の車線変更の方向と同じ方向の先行車両の方向指示器の点灯を検出すると、自車両の加速または減速の抑制を停止することを特徴とする走行制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、運転者の運転を支援する走行制御装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
特許文献1には、先行車両を追従対象として設定し、自車両の走行状態をその先行車両の走行状態に追従させる走行制御装置が開示されている。この走行制御装置は、先行車両が交通流阻害車両であると判定された場合に、その先行車両を追従対象から外す条件を緩和し、先行車両が交通の流れを阻害する交通流阻害車両であると判定された場合に、自車両が先行車両を追い越すことが可能であるか否かを判定する。
【先行技術文献】
【特許文献】
【0003】
特開2009-143272号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示するように、自車両が先行車両を追従する制御を実行しているときに、状況によっては先行車両への追従を解除して車線変更を先行車両を追い越すことがある。この車線変更を完了して前方に他車両がいないことをセンサで認識して、加速を開始すると、加速のタイミングが遅くなるおそれがある。一方、車線変更時に早めに加速を開始すると、状況によっては自車両が先行車両に接近しすぎるおそれがある。
【0005】
本発明の目的は、先行車両を追従する制御を実行中に車線変更を開始する場合に、状況に応じて自車両を早期に加速させる走行制御装置を提供することにある。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明のある態様は、自車両の前方に位置する先行車両を追従する制御を実行可能な走行制御装置であって、先行車両に設けられたストップランプまたは方向指示器の点灯状態を検出した結果を取得する取得部と、先行車両を追従する制御を実行中において、自車両の方向指示器をオンにする検出結果を受けて自車両の減速を抑制または自車両を加速させる走行制御部と、を備える。走行制御部は、自車両の方向指示器をオンにする検出結果を受けて自車両の減速を抑制または自車両を加速させる場合に、先行車両のストップランプの点灯または自車両の車線変更の方向と同じ方向の先行車両の方向指示器の点灯を検出すると、自車両の加速または減速の抑制を停止する。
【発明の効果】
【0007】
本発明によれば、先行車両を追従する制御を実行中に車線変更を開始する場合に、状況に応じて自車両を早期に加速させる走行制御装置を提供できる。
【図面の簡単な説明】
【0008】
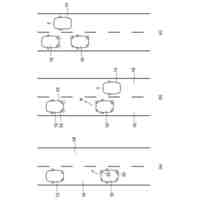
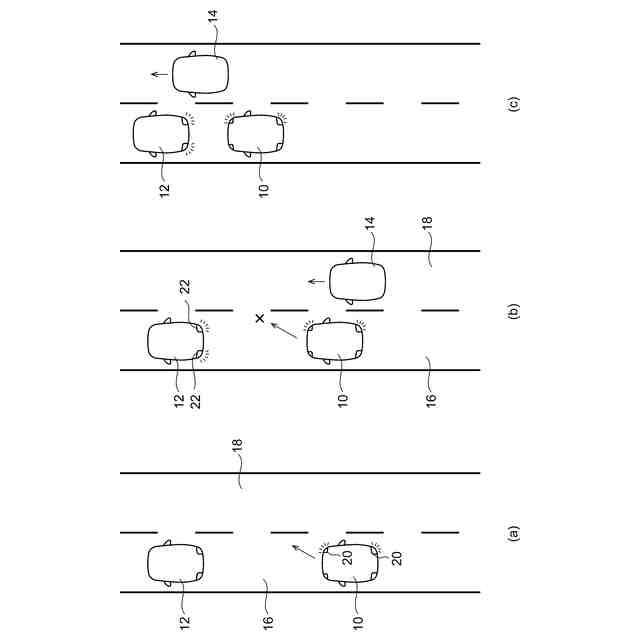
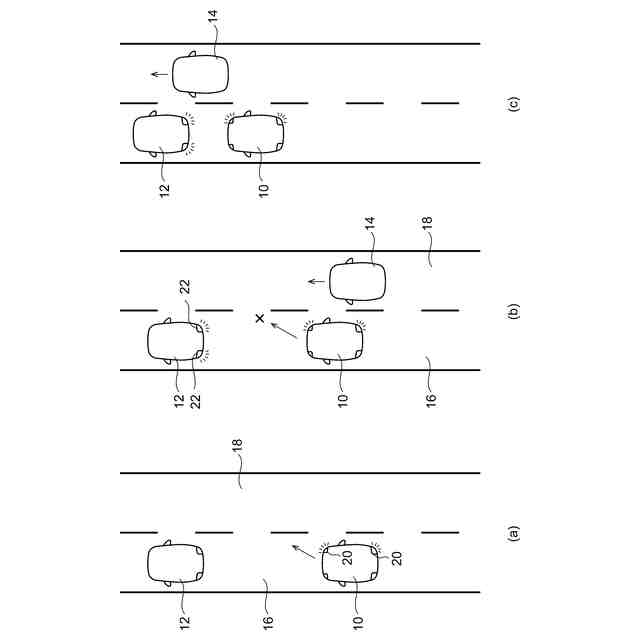
比較技術の走行制御方法について説明するための図である。
比較技術の別の走行制御方法について説明するための図である。
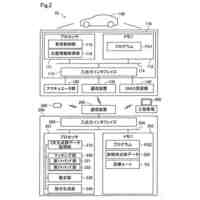
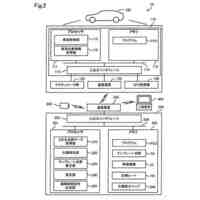
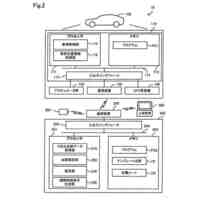
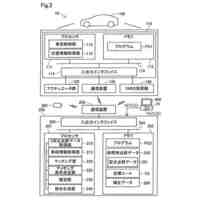
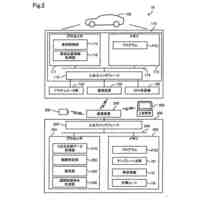
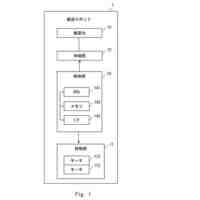
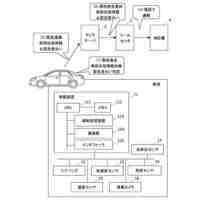
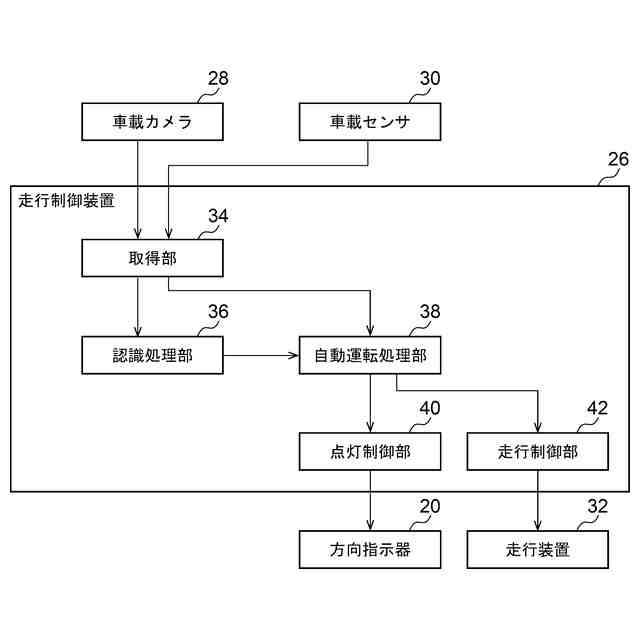
運転支援システムの機能構成を示す図である。
【発明を実施するための形態】
【0009】
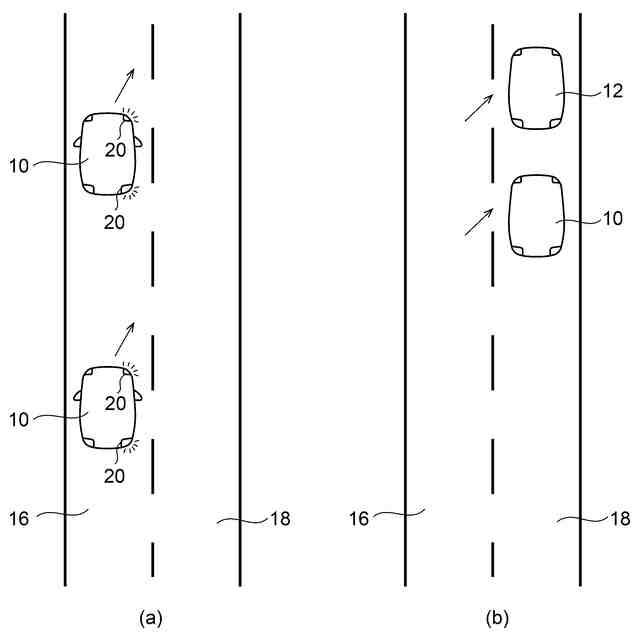
図1は、比較技術の走行制御方法について説明するための図である。図1(a)では、自車両10が自動運転制御によって先行車両12に追従している状態を示す。自車両10は、自律的に走行させる自動運転機能として、例えばクルーズコントロール、追従制御などを実行可能である。追従制御では、自車両10は先行車両12から所定間隔だけ離れて先行車両12を追従し、先行車両12の車速に合わせて走行する。クルーズコントロールでは、自車両10は設定された速度で自動で走行する。自車両10は、追従制御とクルーズコントロールとを切り替えることが可能である。自動運転制御において、自車両10は、自車両10と同一車線で所定間隔内に先行車両12が存在していなければ、クルーズコントロールで走行し、所定間隔内に先行車両12が存在していれば追従制御で走行する。
【0010】
図1(a)では、自車両10の右側の方向指示器20が点灯しており、先行車両12への追従制御を解除して、自車両10が第1車線16から右側の第2車線18に車線変更を企図としている状態を示す。自車両10が方向指示器20を出して隣接車線へ車線変更をする場合に、車線変更を完了して前方に他車両がいないことをセンサで認識して、加速を開始すると、加速のタイミングが遅くなるおそれがある。そこで、自車両10は、方向指示器20を点灯したことをトリガーとして加速を開始する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
今日
トヨタ自動車株式会社
電動車
今日
トヨタ自動車株式会社
電動車
今日
トヨタ自動車株式会社
蓄電セル
今日
トヨタ自動車株式会社
推定装置
今日
トヨタ自動車株式会社
二次電池
今日
トヨタ自動車株式会社
蓄電セル
今日
トヨタ自動車株式会社
推定装置
今日
トヨタ自動車株式会社
制御装置
今日
トヨタ自動車株式会社
制御装置
今日
トヨタ自動車株式会社
制御装置
今日
トヨタ自動車株式会社
制御装置
今日
トヨタ自動車株式会社
差動装置
今日
トヨタ自動車株式会社
駆動装置
今日
トヨタ自動車株式会社
プレス装置
今日
トヨタ自動車株式会社
ブラケット
今日
トヨタ自動車株式会社
運転診断装置
今日
トヨタ自動車株式会社
搬送システム
今日
トヨタ自動車株式会社
配送システム
今日
トヨタ自動車株式会社
運転支援装置
今日
トヨタ自動車株式会社
短絡検知方法
今日
トヨタ自動車株式会社
情報処理装置
今日
トヨタ自動車株式会社
情報処理装置
今日
トヨタ自動車株式会社
走行制御装置
今日
トヨタ自動車株式会社
遠隔制御装置
今日
トヨタ自動車株式会社
電源システム
今日
トヨタ自動車株式会社
車両制御装置
今日
トヨタ自動車株式会社
情報処理装置
今日
トヨタ自動車株式会社
情報処理装置
今日
トヨタ自動車株式会社
配達支援装置
今日
トヨタ自動車株式会社
電源システム
今日
トヨタ自動車株式会社
車両制御装置
今日
トヨタ自動車株式会社
情報処理方法
今日
トヨタ自動車株式会社
情報管理装置
今日
トヨタ自動車株式会社
給電制御装置
今日
トヨタ自動車株式会社
電源システム
今日
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ