TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024172038
公報種別
公開特許公報(A)
公開日
2024-12-12
出願番号
2023089458
出願日
2023-05-31
発明の名称
遠隔制御装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人明成国際特許事務所
主分類
G05D
1/00 20240101AFI20241205BHJP(制御;調整)
要約
【課題】モデルのマッチングによる移動体の位置検出にかかる処理時間を短縮させることができる技術を提供する。
【解決手段】遠隔制御装置は、測距装置を用いて測定された3次元点群データを取得する点群データ取得部と、3次元点群データに対して、移動体を示すテンプレート点群をマッチングさせることによって、3次元点群データにおける移動体の位置及び向きの少なくとも一方を推定する位置推定部と、位置推定部によって3次元点群データに対してテンプレート点群のマッチングが開始される開始位置を決定する開始位置決定部と、推定された移動体の位置及び向きの少なくとも一方を用いて、移動体を遠隔制御するための制御指令を生成して移動体に送信する遠隔制御部と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
遠隔制御装置であって、
測距装置を用いて測定された3次元点群データを取得する点群データ取得部と、
前記3次元点群データに対して、移動体を示すテンプレート点群をマッチングさせることによって、前記3次元点群データにおける前記移動体の位置及び向きの少なくとも一方を推定する位置推定部と、
前記位置推定部によって前記3次元点群データに対して前記テンプレート点群のマッチングが開始される開始位置を決定する開始位置決定部と、
推定された前記移動体の位置及び向きの少なくとも一方を用いて、前記移動体を遠隔制御するための制御指令を生成して前記移動体に送信する遠隔制御部と、を備える、
遠隔制御装置。
続きを表示(約 1,100 文字)
【請求項2】
前記開始位置決定部は、前記3次元点群データにおける前記移動体の位置に関する情報を用いて、前記開始位置を決定する、請求項1に記載の遠隔制御装置。
【請求項3】
請求項2に記載の遠隔制御装置であって
前記開始位置決定部は、
前回に前記3次元点群データと前記テンプレート点群とのマッチングが完了した前回マッチング位置を、前記移動体の位置に関する情報として取得し、
取得された前記前回マッチング位置を用いて、前記開始位置を決定する、
遠隔制御装置。
【請求項4】
請求項3に記載の遠隔制御装置であって、
前記開始位置決定部は、
さらに、前回マッチングが完了した時点から今回マッチングを実行するまでの間に前記前回マッチング位置から移動した前記移動体の移動後の位置を推定し、
推定された前記移動後の位置を用いて前記開始位置を決定する、
遠隔制御装置。
【請求項5】
請求項2に記載の遠隔制御装置であって、
さらに、前記移動体の位置に関する情報である前記移動体の目標ルートを格納する記憶装置を備え、
前記開始位置決定部は、前記目標ルートのいずれかの位置を前記開始位置として決定する、
遠隔制御装置。
【請求項6】
請求項5に記載の遠隔制御装置であって、
前記開始位置決定部は、
前回に前記目標ルートにおいて前記3次元点群データと前記テンプレート点群とのマッチングが完了した前回マッチング位置を取得し、
取得された前記目標ルートにおける前記前回マッチング位置を用いて前記開始位置を決定する、
遠隔制御装置。
【請求項7】
請求項2に記載の遠隔制御装置であって、
前記開始位置決定部は、予め定められた物体検出手法によって前記3次元点群データから検出された前記移動体の位置と、前記3次元点群データの背景に対応する点群データと前記移動体に対応する点群データとの差分により検出された前記移動体の位置とのいずれかを、前記移動体の位置に関する情報として用いて、前記開始位置を決定する、
遠隔制御装置。
【請求項8】
請求項7に記載の遠隔制御装置であって、
前記開始位置決定部は、
前記移動体の位置が複数検出された場合に、
さらに、前記移動体を識別するための移動体識別情報を用いて、検出された複数の前記移動体の位置のうち、前記移動体識別情報に対応する前記移動体の位置を用いて、前記開始位置を決定する、
遠隔制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、遠隔制御装置に関する。
続きを表示(約 4,000 文字)
【背景技術】
【0002】
空間内の物体の位置を検出する技術が知られている。例えば、特許文献1では、カメラから取得された入力画像から車両の側面形状を示す2次元の投影像が生成され、生成された投影像に対して、メモリに格納された2次元モデルを、2次元の投影像の先頭位置に位置決めしてから順次に走査され、走査位置ごとにマッチングすることにより、車両の位置を認識する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開平11-259658号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の技術では、メモリに格納された2次元モデルを、2次元の投影像の先頭位置に位置決めしてから順次に走査するため、マッチングが完了するまでの時間が長くなるといった問題がある。そのため、メモリに格納されたモデルのマッチングにより移動体の位置を検出する技術において、移動体の位置が検出されるまでの時間を短縮するための技術が望まれている。
【課題を解決するための手段】
【0005】
本開示は、以下の形態として実現することが可能である。
【0006】
(1)本開示の一形態によれば、遠隔制御装置が提供される。この遠隔制御装置は、測距装置を用いて測定された3次元点群データを取得する点群データ取得部と、前記3次元点群データに対して、移動体を示すテンプレート点群をマッチングさせることによって、前記3次元点群データにおける前記移動体の位置及び向きの少なくとも一方を推定する位置推定部と、前記位置推定部によって前記3次元点群データに対して前記テンプレート点群のマッチングが開始される開始位置を決定する開始位置決定部と、推定された前記移動体の位置及び向きの少なくとも一方を用いて、前記移動体を遠隔制御するための制御指令を生成して前記移動体に送信する遠隔制御部と、を備える。
この形態の遠隔制御装置によれば、マッチングの開始位置を移動体の近傍に決定することにより、移動体の位置を早期に検出することができ、テンプレートマッチングによる移動体の位置検出にかかる処理時間を短縮させることができる。
(2)上記形態の遠隔制御装置において、前記開始位置決定部は、前記3次元点群データにおける前記移動体の位置に関する情報を用いて、前記開始位置を決定してよい。
この形態の遠隔制御装置によれば、移動体の位置に関する情報を用いて、テンプレートマッチングの開始位置を決定することにより、移動体の位置を早期に検出することができ、テンプレートマッチングにかかる処理時間を短縮させることができる。
(3)上記形態の遠隔制御装置において、記開始位置決定部は、前回に前記3次元点群データと前記テンプレート点群とのマッチングが完了した前回マッチング位置を、前記移動体の位置に関する情報として取得してよく、取得された前記前回マッチング位置を用いて、前記開始位置を決定してよい。
この形態の遠隔制御装置によれば、今回のマッチング時における移動体の位置の近傍である可能性が高い前回マッチング位置を用いることにより、簡易な処理によりテンプレートマッチングにかかる処理時間を短縮させることができる。
(4)上記形態の遠隔制御装置において、前記開始位置決定部は、さらに、前回マッチングが完了した時点から今回マッチングを実行するまでの間に前記前回マッチング位置から移動した前記移動体の移動後の位置を推定してよく、推定された前記移動後の位置を用いて前記開始位置を決定してよい。
この形態の遠隔制御装置によれば、移動後の移動体の位置を推定することにより、マッチングの開始位置を、今回のマッチング時における移動体の位置により近い位置に設定することができ、テンプレートマッチングにかかる処理時間をさらに短縮させることができる。
(5)上記形態の遠隔制御装置において、さらに、前記移動体の位置に関する情報である前記移動体の目標ルートを格納する記憶装置を備えてよく、前記開始位置決定部は、前記目標ルートのいずれかの位置を前記開始位置として決定してよい。
この形態の遠隔制御装置によれば、移動体が存在する可能性が高い目標ルート上の位置を開始位置に設定することにより、移動体の位置を早期に検出することができ、テンプレートマッチングにかかる処理時間を短縮させることができる。
(6)上記形態の遠隔制御装置において、前記開始位置決定部は、前回に前記目標ルートにおいて前記3次元点群データと前記テンプレート点群とのマッチングが完了した前回マッチング位置を取得してよく、取得された前記目標ルートにおける前記前回マッチング位置を用いて前記開始位置を決定してよい。
この形態の遠隔制御装置によれば、移動体が存在する可能性がより高い目標ルート上の前回マッチング位置を用いることにより、移動体の位置をより早期に検出することができる。
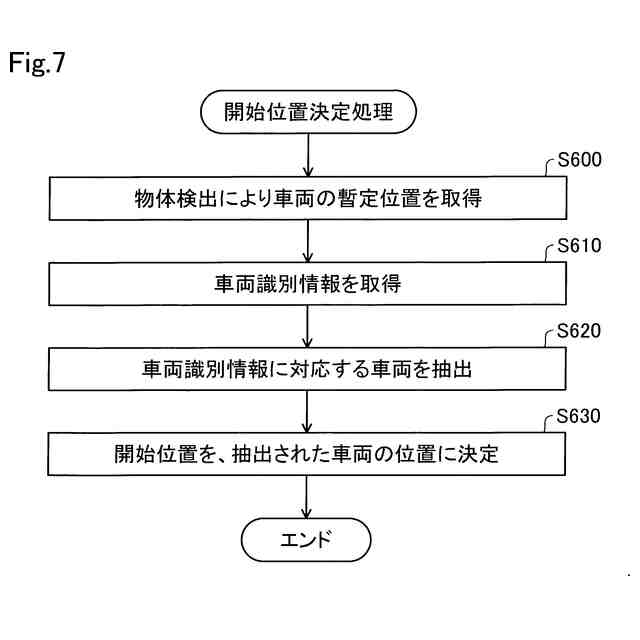
(7)上記形態の遠隔制御装置において、前記開始位置決定部は、予め定められた物体検出手法によって前記3次元点群データから検出された前記移動体の位置と、前記3次元点群データの背景に対応する点群データと前記移動体に対応する点群データとの差分により検出された前記移動体の位置とのいずれかを、前記移動体の位置に関する情報として用いて、前記開始位置を決定してよい。
この形態の遠隔制御装置によれば、物体検出を利用して移動体の暫定位置を抽出することができ、簡易な方法により、移動体の位置を早期に検出することができ、テンプレートマッチングにかかる処理時間を短縮させることができる。
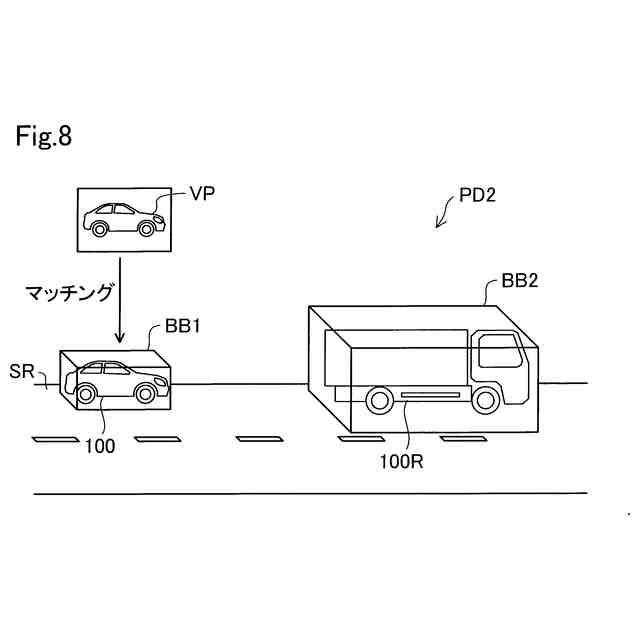
(8)上記形態の遠隔制御装置において、前記開始位置決定部は、前記移動体の位置が複数検出された場合に、さらに、前記移動体を識別するための移動体識別情報を用いて、検出された複数の前記移動体の位置のうち、前記移動体識別情報に対応する前記移動体の位置を用いて、前記開始位置を決定してよい。
この形態の遠隔制御装置によれば、物体検出によって複数の移動体の暫定位置が検出された場合であっても、移動体識別情報を用いることにより、制御対象の移動体の位置を抽出することができる。
本開示は、遠隔制御装置以外の種々の形態で実現することも可能である。例えば、遠隔制御システム、移動体の移動方法、移動体の製造方法、移動体の検出方法、移動体検出装置、遠隔制御システムの制御方法、遠隔制御装置の制御方法、これらの制御方法を実現するコンピュータプログラム、そのコンピュータプログラムを記録した一時的でない記録媒体等の形態で実現することができる。
【図面の簡単な説明】
【0007】
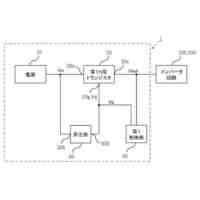
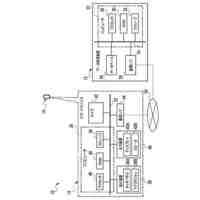
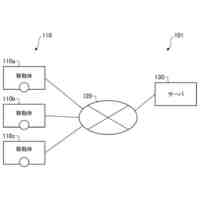
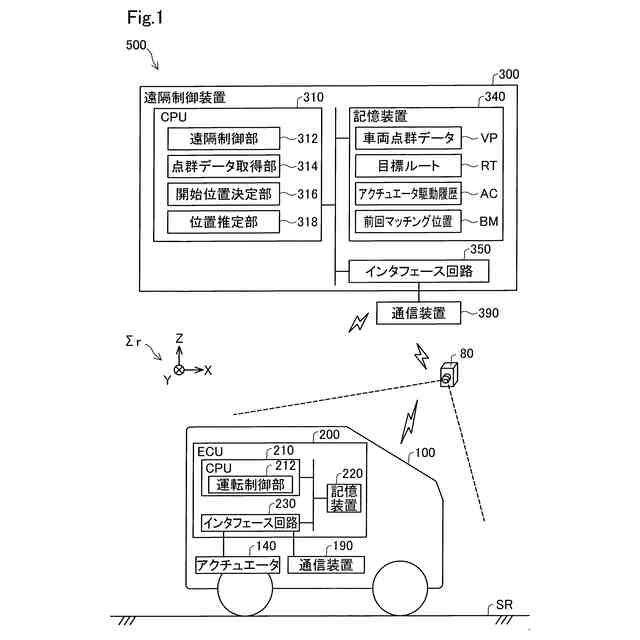
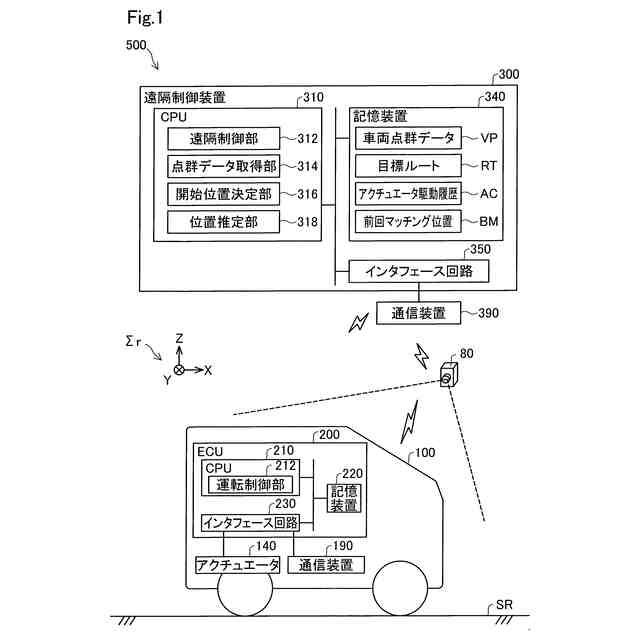
遠隔制御システムの概略構成を示す説明図。
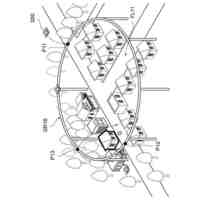
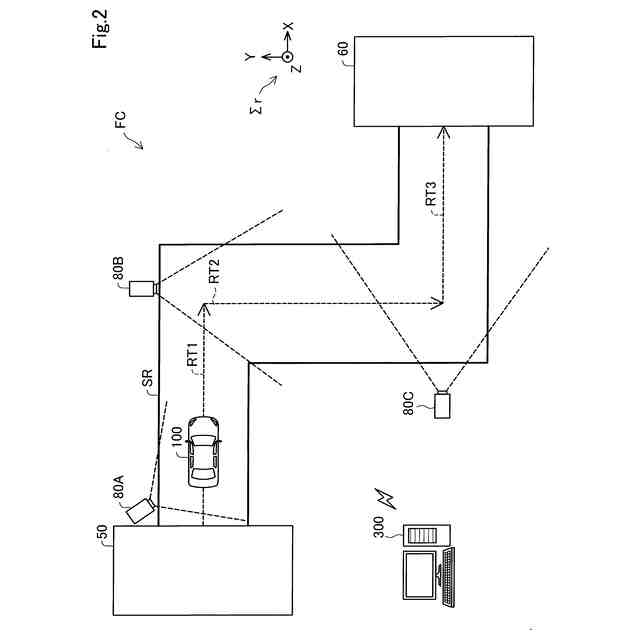
車両の走行方法を模式的に示す説明図。
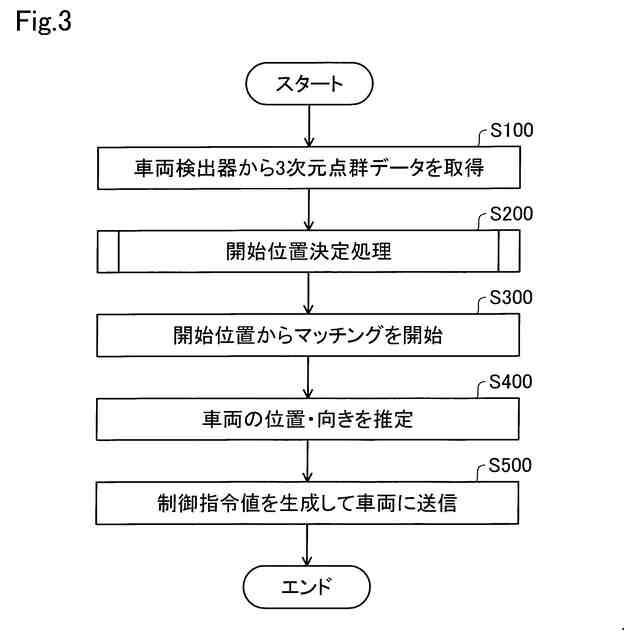
遠隔制御による車両の走行処理の処理ルーチンを示すフローチャート。
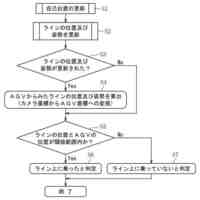
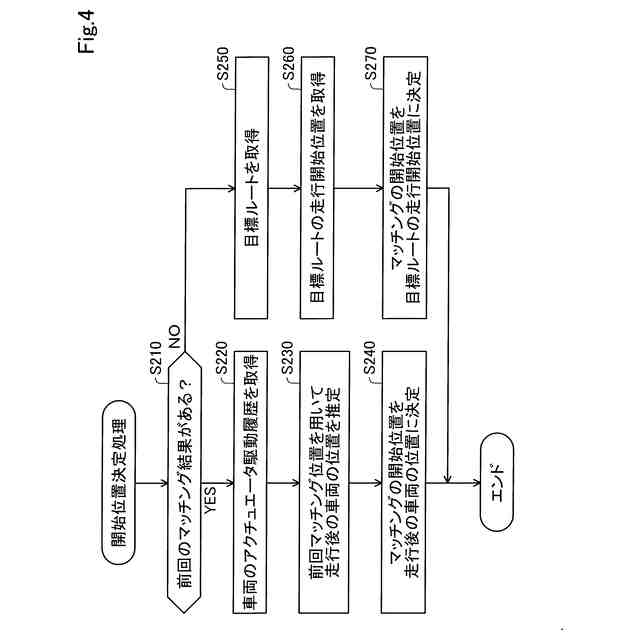
第1実施形態に係る開始位置決定処理の処理ルーチンを示すフローチャート。
前回マッチング位置からの走行後の車両の推定位置を示す説明図。
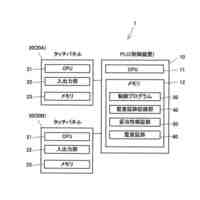
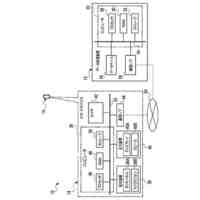
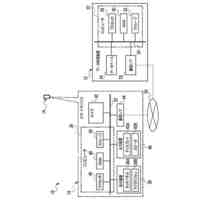
第2実施形態に係る遠隔制御装置の内部機能性を示すブロック図。
第2実施形態に係る開始位置決定処理を示すフローチャート。
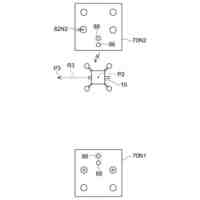
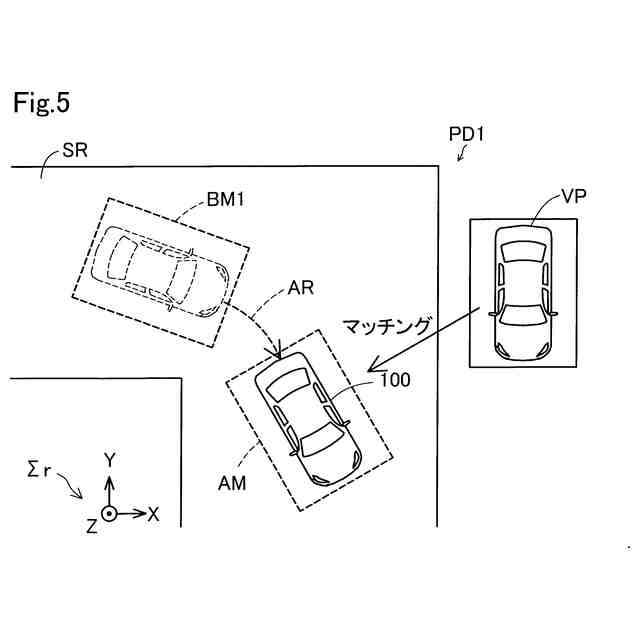
第2実施形態に係る開始位置決定処理におけるテンプレートマッチングを示す説明図。
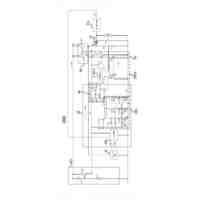
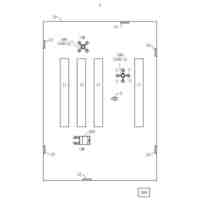
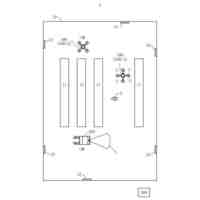
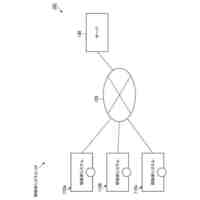
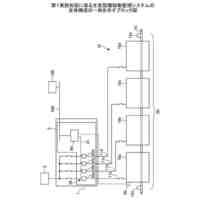
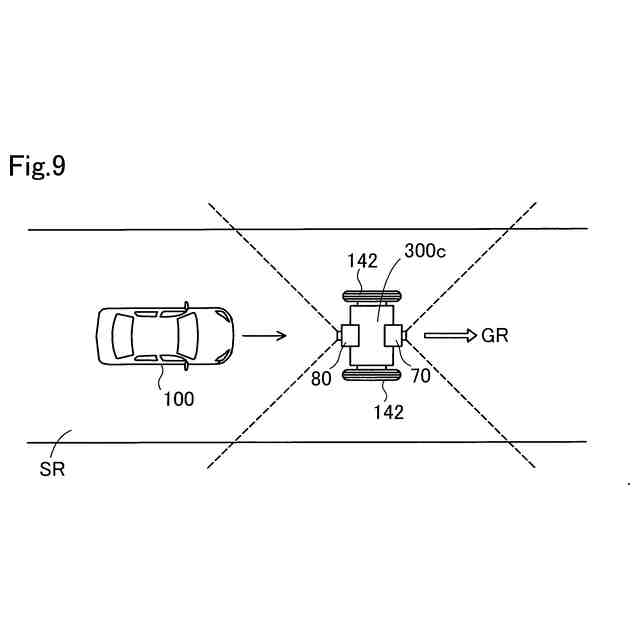
第3実施形態に係る遠隔制御装置の全体構成の例を上面視で示す説明図。
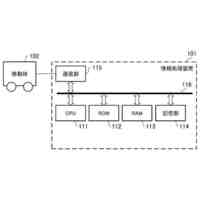
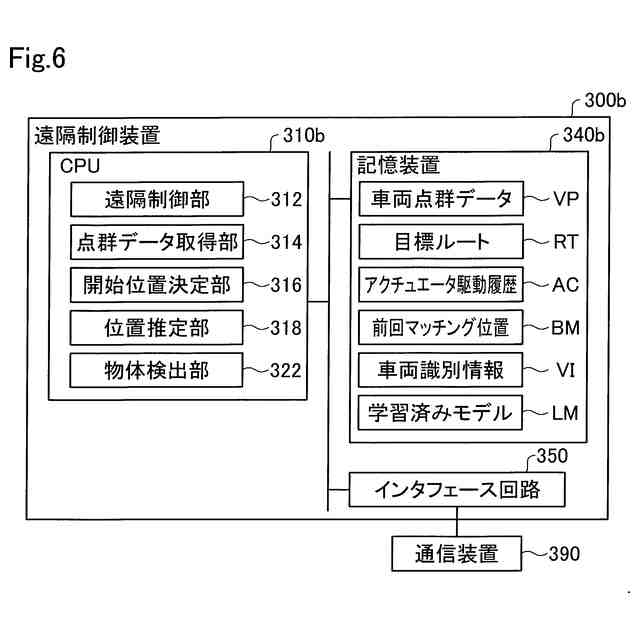
第3実施形態に係る遠隔制御装置の内部機能構成を示すブロック図。
【発明を実施するための形態】
【0008】
A.第1実施形態:
図1は、本開示の第1実施形態に係る遠隔制御装置300を含む遠隔制御システム500の概略構成を示す説明図である。遠隔制御装置300は、遠隔制御によって車両100を自動走行させるための制御指令を生成して車両100に送信する。遠隔制御システム500は、例えば、遠隔制御によって走行可能な車両100を製造する工場で用いられる。
【0009】
車両100は、例えば、乗用車、トラック、バス、ならびに工事用車両などである。車両100は、電気自動車(BEV:Battery Electric Vehicle)であることが好ましい。なお、車両100は、電気自動車に限られず、例えば、ガソリン自動車や、ハイブリッド自動車や、燃料電池自動車でもよい。車両100は、車両通信装置190と、アクチュエータ140と、ECU(Electronic Control Unit)200とを備えている。
【0010】
ECU200は、車両100に搭載され、車両100の各種の制御を実行する。ECU200は、HDD(ハードディスクドライブ)、SSD(ソリッドステートドライブ)、光記録媒体、半導体メモリ等の記憶装置220と、中央演算処理装置としてのCPU210と、インタフェース回路230とを備えている。CPU210と、記憶装置220と、インタフェース回路230とは、内部バスを介して、双方向に通信可能に接続されている。インタフェース回路230には、アクチュエータ140、車両通信装置190が接続されている。車両通信装置190は、工場内のアクセスポイント等を介して、遠隔制御装置300など、ネットワークに接続された車両100の外部の装置との無線通信を行う。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業車
2日前
ローム株式会社
半導体集積回路
7日前
株式会社ダイフク
搬送車
2日前
トヨタ自動車株式会社
工作機械の制御装置
1日前
トヨタ自動車株式会社
工作機械の制御装置
今日
株式会社ダイフク
物品搬送設備
今日
オルガノ株式会社
運転管理方法及び運転管理装置
2日前
ローム株式会社
バイアス回路
1日前
ミツミ電機株式会社
多方向入力装置
5日前
ミツミ電機株式会社
多方向入力装置
5日前
ミツミ電機株式会社
多方向入力装置
5日前
ミツミ電機株式会社
多方向入力装置
5日前
ミツミ電機株式会社
多方向入力装置
5日前
ダイハツ工業株式会社
無人搬送車の制御方法
今日
ローム株式会社
電源起動監視回路
今日
ローム株式会社
レギュレータ回路
6日前
岩井ファルマテック株式会社
監査証跡の管理システム
8日前
新電元工業株式会社
レギュレータ回路及びインバータ回路
5日前
ソフトバンクグループ株式会社
システム
6日前
三菱ロジスネクスト株式会社
防衛システム
6日前
三菱ロジスネクスト株式会社
防衛システム
6日前
ソフトバンクグループ株式会社
システム
6日前
トヨタ自動車株式会社
車両用ペダル装置
6日前
ソフトバンクグループ株式会社
システム
6日前
ソフトバンクグループ株式会社
システム
2日前
キヤノン株式会社
情報処理装置、方法、及びプログラム
今日
キヤノン株式会社
情報処理装置、制御方法及びプログラム
5日前
三共木工株式会社
遠隔操作システム、遠隔操作装置、及び遠隔操作対象
5日前
有限会社村上不動産鑑定士事務所
無人航空機管理システム
5日前
株式会社日立製作所
状態検知装置
1日前
トヨタ自動車株式会社
制御装置および制御方法
12日前
ローム株式会社
半導体装置、電源装置、および車両
5日前
キヤノン株式会社
移動体、制御方法、及びコンピュータプログラム
7日前
ローム株式会社
制御装置、コントローラおよび電子制御装置
7日前
富士電機機器制御株式会社
生産設備稼働監視システム及びデータ処理装置
8日前
キヤノン株式会社
情報処理方法、情報処理システムおよびプログラム
今日
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ