TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024172377
公報種別
公開特許公報(A)
公開日
2024-12-12
出願番号
2023090051
出願日
2023-05-31
発明の名称
搬送システム
出願人
トヨタ自動車株式会社
代理人
個人
主分類
B65G
1/04 20060101AFI20241205BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】載置台を昇降させる伸縮部の寿命を向上する搬送システムを実現する。
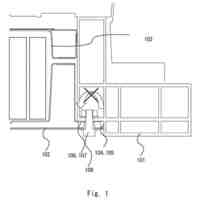
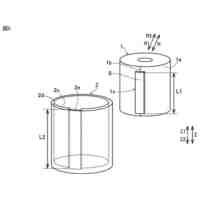
【解決手段】本開示の一形態に係る搬送システムは、移動可能な移動部11と、移動部11上に設けられた鉛直方向に伸縮可能な伸縮部12と、伸縮部12の先端に取り付けられた載置台13と、載置台13と棚2の間で荷物を移載する際の移動部11から見た棚2の方向を、伸縮部12に蓄積される応力負荷が伸縮部12の周方向で平準化されるように選択する制御部14とを備える
【選択図】図1
特許請求の範囲
【請求項1】
移動可能な移動部と、
前記移動部に設けられ、上下方向に伸縮する伸縮部と、
前記伸縮部の先端に取り付けられた載置台と、
前記載置台と棚の間で荷物を移載する際の前記移動部から見た前記棚の方向である移載方向を、前記伸縮部に蓄積される応力負荷が前記伸縮部の周方向で平準化されるように選択する制御部と
を備える搬送システム。
続きを表示(約 360 文字)
【請求項2】
前記制御部は、前記制御部によって過去に選択された移載方向を示す方向履歴に基づいて前記移載方向を選択する
請求項1に記載の搬送システム。
【請求項3】
前記制御部は、過去に前記載置台と前記棚の間で移載された荷物の重量を示す重量履歴にさらに基づいて前記移載方向を選択する
請求項2に記載の搬送システム。
【請求項4】
前記制御部は、過去に前記載置台と前記棚の間で荷物を移載したときの前記載置台と前記棚の間の距離を示す距離履歴にさらに基づいて前記移載方向を選択する
請求項2または3のいずれかに記載の搬送システム。
【請求項5】
前記制御部は、複数の方向の中から前記移載方向をランダムに選択する
請求項1に記載の搬送システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、搬送システムに関し、特に搬送ロボットと棚の間で荷物を移載する技術に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
特許文献1は、荷物載置部との間で荷物を移載可能な搬送車に関する技術を開示している。搬送車は、搬送車に移載された荷物の走行方向へのずれ量を検出した後、荷物を荷物載置部に移載し、ずれ量に応じた補償量走行し、荷物載置部から収納部へ荷物を移載する。
【先行技術文献】
【特許文献】
【0003】
特許第5104558号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
棚と載置台の間で荷物を移載する際、載置台に偏った荷重がかかる。したがって、載置台を昇降させる伸縮部に応力負荷が蓄積し、伸縮部の耐久性が低下する恐れがある。
【0005】
本開示は、このような問題点に鑑みてなされたものであり、載置台を昇降させる伸縮部の寿命を向上する搬送システムを実現する。
【課題を解決するための手段】
【0006】
本開示の一態様の搬送システムは、
移動可能な移動部と、
前記移動部上に設けられ、上下方向に伸縮する伸縮部と、
前記伸縮部の先端に取り付けられた載置台と、
前記載置台と棚の間で荷物を移載する際の前記移動部から見た前記棚の方向である移載方向を、前記伸縮部に蓄積される応力負荷が前記伸縮部の周方向で平準化されるように選択する制御部と
を備える。
【発明の効果】
【0007】
本開示によれば、載置台を昇降させる伸縮部の寿命を向上する搬送システムを実現することができる。
【図面の簡単な説明】
【0008】
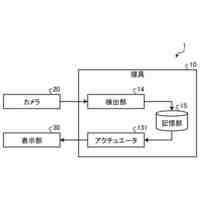
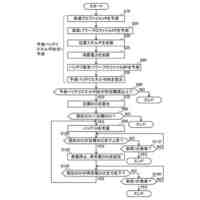
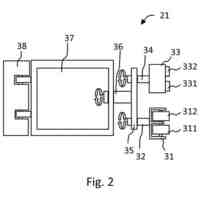
実施形態1にかかる搬送ロボットの機能構成を説明する図である。
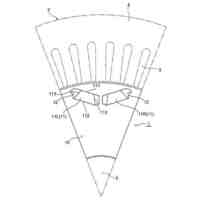
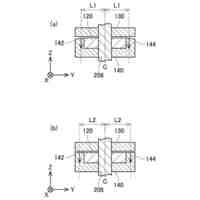
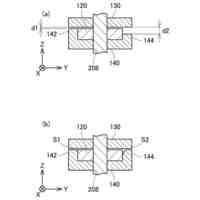
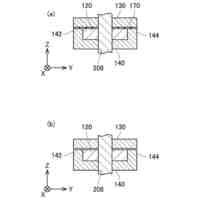
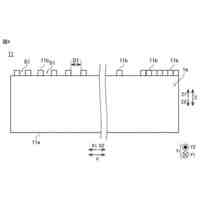
実施形態1にかかる搬送ロボットの側面図および上面図である。
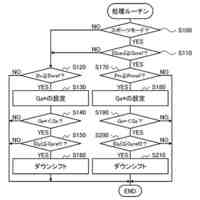
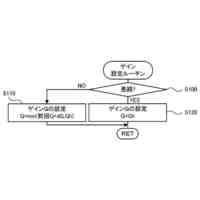
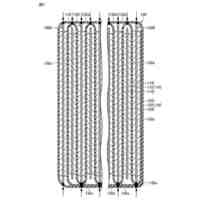
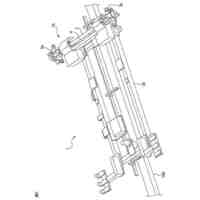
実施形態1にかかる搬送ロボットの動作を説明する図である。
実施形態1にかかる搬送ロボットの動作を説明する図である。
【発明を実施するための形態】
【0009】
以下、本開示を適用した具体的な実施の形態について、図面を参照しながら詳細に説明する。但し、本開示が以下の実施の形態に限定される訳ではない。また、説明を明確にするため、以下の記載及び図面は、適宜、簡略化されている。
【0010】
実施形態1
以下、図面を参照して実施形態1にかかる搬送システムについて説明する。搬送システムは、荷物を搬送する搬送ロボットを備える。搬送システムは、搬送ロボットによる荷物の搬送を管理するサーバをさらに備えていてもよい。この場合、実施形態1にかかる搬送ロボットが備える機能の一部は、サーバに備えられていてもよい。なお、搬送ロボットにおいて処理が完結したシステムも、実施形態1にかかる搬送システムには含まれ得る。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
13日前
トヨタ自動車株式会社
車両
14日前
トヨタ自動車株式会社
車両
7日前
トヨタ自動車株式会社
車両
今日
トヨタ自動車株式会社
寝具
21日前
トヨタ自動車株式会社
車両
15日前
トヨタ自動車株式会社
車両
20日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
車両
20日前
トヨタ自動車株式会社
方法
13日前
トヨタ自動車株式会社
ロータ
14日前
トヨタ自動車株式会社
自動車
今日
トヨタ自動車株式会社
サーバ
13日前
トヨタ自動車株式会社
電極体
20日前
トヨタ自動車株式会社
移動体
20日前
トヨタ自動車株式会社
電動車
今日
トヨタ自動車株式会社
電動車
今日
トヨタ自動車株式会社
自動車
20日前
トヨタ自動車株式会社
電動車
1日前
トヨタ自動車株式会社
ドリル
15日前
トヨタ自動車株式会社
リレー
今日
トヨタ自動車株式会社
電動車
21日前
トヨタ自動車株式会社
サーバ
14日前
トヨタ自動車株式会社
リレー
今日
トヨタ自動車株式会社
リレー
今日
トヨタ自動車株式会社
搬送装置
今日
トヨタ自動車株式会社
搬送装置
15日前
トヨタ自動車株式会社
充電装置
7日前
トヨタ自動車株式会社
蓄電セル
8日前
トヨタ自動車株式会社
蓄電セル
8日前
トヨタ自動車株式会社
蓄電セル
6日前
トヨタ自動車株式会社
制御装置
8日前
トヨタ自動車株式会社
差動装置
今日
トヨタ自動車株式会社
固体電池
14日前
トヨタ自動車株式会社
蓄電セル
8日前
トヨタ自動車株式会社
算出装置
14日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ