TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024174572
公報種別
公開特許公報(A)
公開日
2024-12-17
出願番号
2023092465
出願日
2023-06-05
発明の名称
遠隔車両制御システム
出願人
日本電信電話株式会社
,
個人
代理人
個人
,
個人
,
個人
主分類
B61L
27/16 20220101AFI20241210BHJP(鉄道)
要約
【課題】所望の制御性能を維持しつつ、通信トラヒックの削減も実現できる遠隔制御装置、遠隔車両制御システム、及び遠隔車両制御方法を提供することを目的とする。
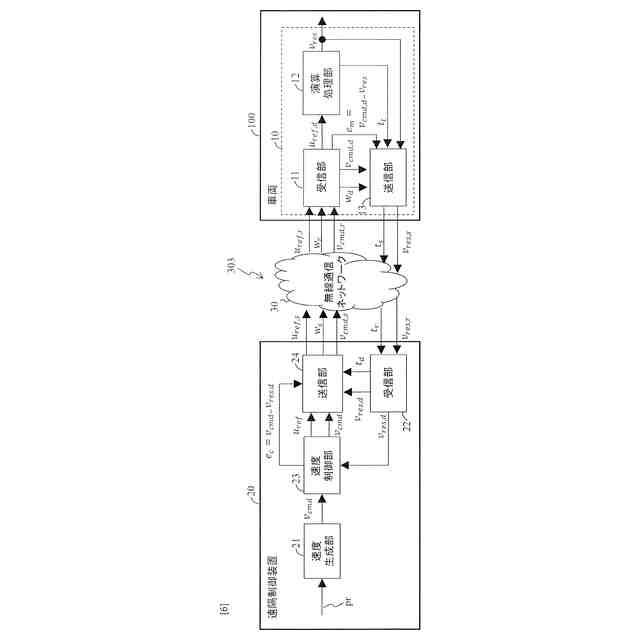
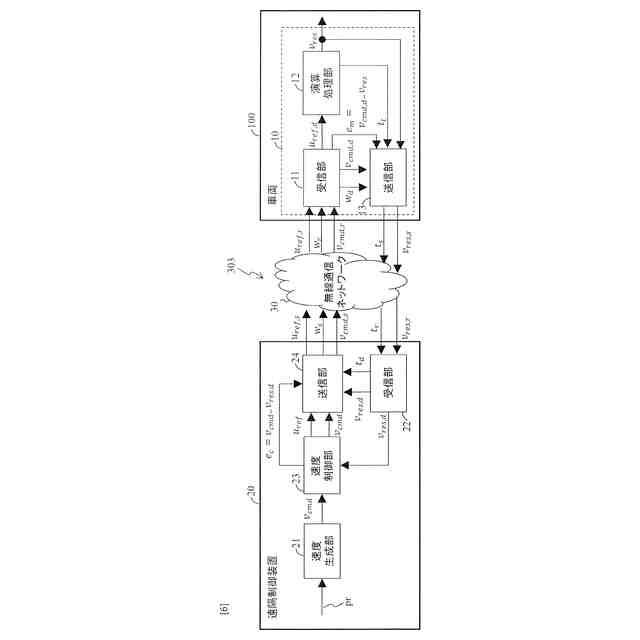
【解決手段】本発明に係る遠隔制御装置は、車両100の走行に関する計測情報(車両速度応答v
res
)を車両100から受信する受信部22と、前記計測情報と目標値(目標速度v
cmd
)とから、車両100の走行が前記目標値に近づくように車両100を駆動する制御情報(目標速度と制御入力u
ref
)を生成する制御部23と、前記制御情報及び前記車両に前記計測情報を送信させる送信指示(w)を車両100に送信する送信部24と、を備える。送信部24は、前記計測情報と前記目標値との差分である制御誤差(e
c
)、及び前記計測情報の情報鮮度(A
1
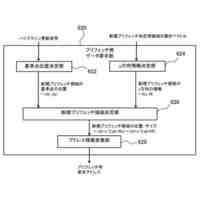
)に基づいて、前記制御情報及び前記送信指示を車両100に送信するか否かを判定することを特徴とする。
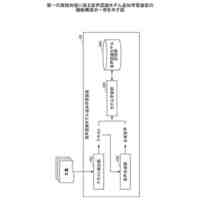
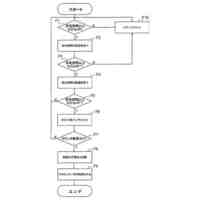
【選択図】図6
特許請求の範囲
【請求項1】
目標値に基づいて単数又は複数の車両の走行を遠隔制御する遠隔制御装置であって、
前記車両の走行に関する計測情報を前記車両から受信する受信部と、
前記計測情報と前記目標値とから、前記車両の走行が前記目標値に近づくように前記車両を駆動する制御情報を生成する制御部と、
前記制御情報及び前記車両に前記計測情報を送信させる送信指示を前記車両に送信する送信部と、
を備え、
前記送信部は、前記計測情報と前記目標値との差分である制御誤差、及び前記計測情報の情報鮮度に基づいて、前記制御情報及び前記送信指示を前記車両に送信するか否かを判定すること
を特徴とする遠隔制御装置。
続きを表示(約 1,200 文字)
【請求項2】
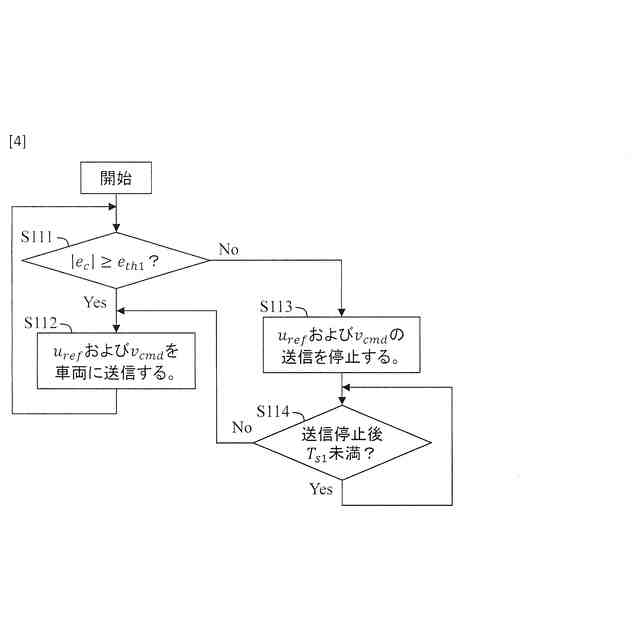
前記送信部は、前記制御誤差が閾値未満の場合、前記制御情報及び前記送信指示の送信を停止すること
を特徴とする請求項1に記載の遠隔制御装置。
【請求項3】
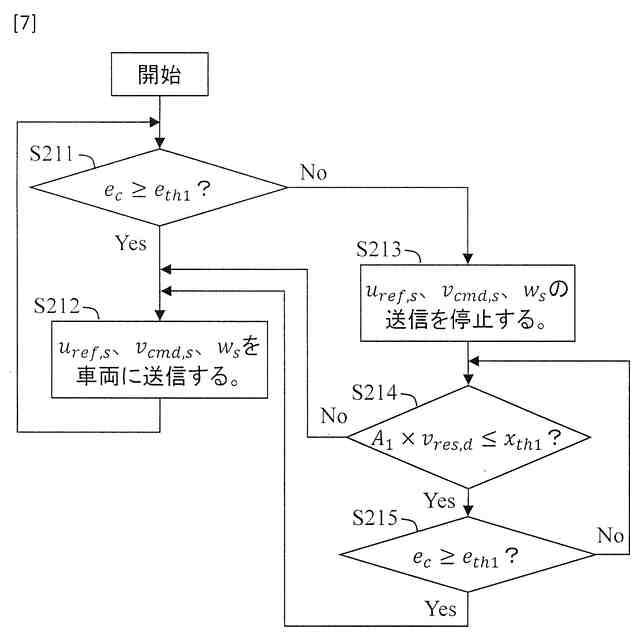
前記送信部は、前記情報鮮度と前記計測情報との積が所定の判定値より大きくなったとき、又は前記制御誤差が閾値以上となったときに、前記制御情報及び前記送信指示の送信を再開すること
を特徴とする請求項2に記載の遠隔制御装置。
【請求項4】
前記送信部は、前記制御情報及び前記送信指示の送信を停止してから一定期間経過後に前記制御情報及び前記送信指示の送信を行うことを特徴とする請求項2に記載の遠隔制御装置。
【請求項5】
請求項1から4のいずれかに記載の遠隔制御装置と、
前記車両に搭載される車両制御部と、
を備える遠隔車両制御システムであって、
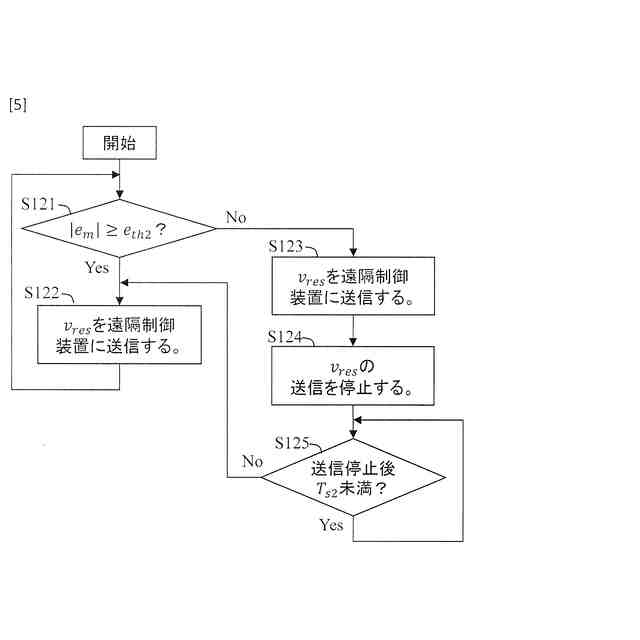
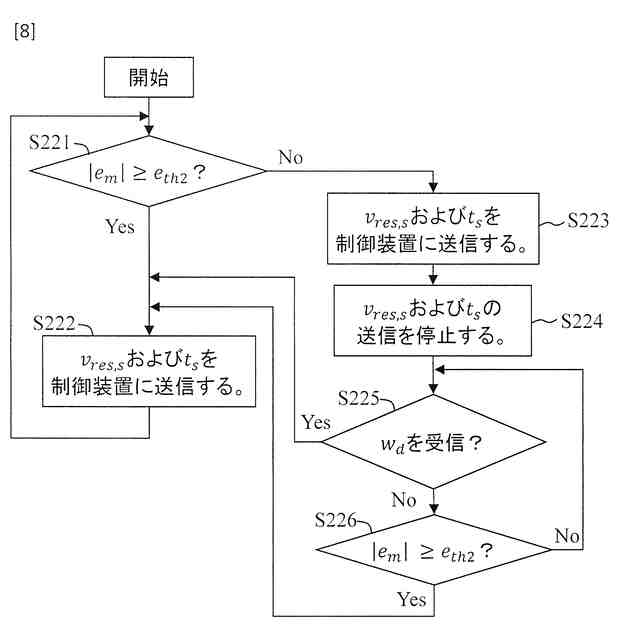
前記車両制御部は、前記遠隔制御装置から受信した前記目標値と前記車両が計測した前記計測情報との差分である車両側制御誤差が車両側閾値未満の場合、前記計測情報と前記計測情報の測定時刻を前記遠隔制御装置へ送信することを停止すること
を特徴とする遠隔車両制御システム。
【請求項6】
前記車両制御部は、前記車両側制御誤差が前記車両側閾値以上となったとき、又は前記遠隔制御装置から前記送信指示を受信したときに、前記計測情報と前記計測情報の測定時刻を前記遠隔制御装置へ送信することを再開すること
を特徴とする請求項5に記載の遠隔車両制御システム。
【請求項7】
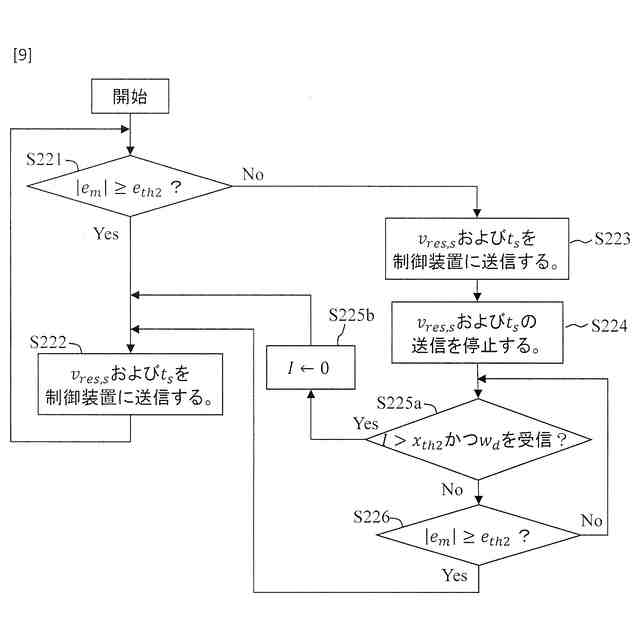
前記車両制御部は、
前記計測情報と前記計測情報の測定時刻を前記遠隔制御装置へ送信することを停止してからの前記計測情報の積分値を計算しており、
前記車両側制御誤差が前記車両側閾値以上となったとき、又は前記遠隔制御装置から前記送信指示を受信したとき且つ前記積分値が規定値より大きいときに、前記計測情報と前記計測情報の測定時刻を前記遠隔制御装置へ送信することを再開すること
を特徴とする請求項5に記載の遠隔車両制御システム。
【請求項8】
目標値に基づいて単数又は複数の車両の走行を遠隔制御する遠隔車両制御方法であって、
前記車両の走行に関する計測情報を前記車両から受信すること、
前記計測情報と前記目標値とから、前記車両の走行が前記目標値に近づくように前記車両を駆動する制御情報を生成すること、及び
前記制御情報及び前記車両に前記計測情報を送信させる送信指示を前記車両に送信すること、
を行っており、
前記制御情報及び前記送信指示を前記車両に送信するか否かを、前記計測情報と前記目標値との差分である制御誤差、及び前記計測情報の情報鮮度に基づいて判定すること
を特徴とする遠隔車両制御方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、遠隔車両制御システムのデータ送信技術に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
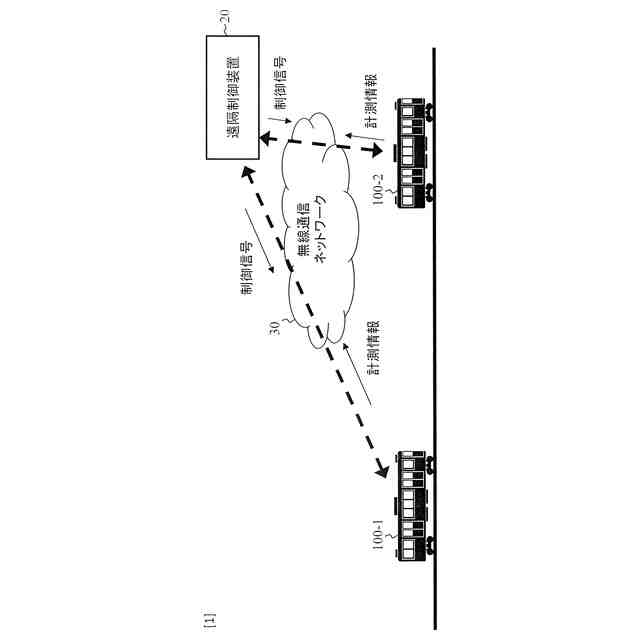
鉄道車両の制御を効率的に実現する手法として、車両と地上装置(制御装置)との間の通信を利用する無線式列車制御システム(CBTC:Communication-Based Train Control)がある。CBTCを用いて車両の遠隔制御を実現する場合、通信ネットワークの品質(遅延、データ損失など)が制御性能に大きな影響を及ぼすことが知られている。
【0003】
また、データが取得されてからの経過時刻を表す情報の鮮度(AoI:Age of Information)はネットワーク遅延だけでなく装置内の情報処理遅延も含み、制御性能を維持する指標として重要となるため、CBTCシステムにおけるAoIの最適化手法が提案されている(例えば、非特許文献1を参照。)。
【0004】
一方、CBTCでは車両数や各種アプリケーション数の増大により通信トラヒックの増大が見込まれる。通信トラヒックを削減する手法として、モータの遠隔制御システムにおいて制御誤差に基づいてデータの送信タイミングを制御するイベント駆動型の制御手法が提案されている(例えば、非特許文献2を参照。)。
【先行技術文献】
【非特許文献】
【0005】
X. Wang, L. Liu, L. Zhu, and T. Tang, “Train -Centric CBTC Meets Age of Information in Train-to Train Communications,” IEEE Transactions on Intelligent Transportation Systems, Vol.21, No.10, pp. 4072-4085, Oct 2020.
T. Yamanaka, T. Iwai, and R. Kubo, “Quality of Performance Aware Data Transmission for Energy-Efficient Networked Control,” IEEE Access, Vol. 9, pp. 5769-5778, January 2021.
【発明の概要】
【発明が解決しようとする課題】
【0006】
CBTCの通信トラヒック削減のためには、前述のイベント駆動型の制御手法を用い、制御誤差とそのしきい値に基づいてデータの送信タイミングを制御することが有効と考えられる。しかし、フィードバック制御ループ内に通信ネットワークが存在するネットワーク化制御システムでは、通信トラヒック削減のためにフィードバック経路へのデータ送信も停止される時間が発生することがある。このような時間には、制御装置はリアルタイムに制御誤差を計算することができず、制御誤差のしきい値を用いてデータを送信するか否かの判定が困難となる。このように、CBTCにおけるイベント駆動型の制御手法には、通信トラヒック削減との兼ね合い上、所望の制御性能を維持することが困難という課題があった。
【0007】
そこで、本発明は、前記課題を解決するために、本発明は、所望の制御性能を維持しつつ、通信トラヒックの削減も実現できる遠隔制御装置、遠隔車両制御システム、及び遠隔車両制御方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明に係る遠隔制御装置は、イベント駆動型の制御に使用する制御誤差に加え、車両からフィードバックされる車両速度情報と当該車両速度情報の情報鮮度にも基づいてデータ送信タイミングを決定することとした。なお、情報鮮度(AoI:Age of Information)とは、データが取得されてからの経過時刻である。
【0009】
具体的には、本発明に係る遠隔制御装置は、目標値に基づいて単数又は複数の車両の走行を遠隔制御する遠隔制御装置であって、
前記車両の走行に関する計測情報を前記車両から受信する受信部と、
前記計測情報と前記目標値とから、前記車両の走行が前記目標値に近づくように前記車両を駆動する制御情報を生成する制御部と、
前記制御情報及び前記車両に前記計測情報を送信させる送信指示を前記車両に送信する送信部と、
を備え、
前記送信部は、前記計測情報と前記目標値との差分である制御誤差、及び前記計測情報の情報鮮度に基づいて、前記制御情報及び前記送信指示を前記車両に送信するか否かを判定すること
を特徴とする。
【0010】
また、本発明に係る遠隔車両制御方法は、目標値に基づいて単数又は複数の車両の走行を遠隔制御する遠隔車両制御方法であって、
前記車両の走行に関する計測情報を前記車両から受信すること、
前記計測情報と前記目標値とから、前記車両の走行が前記目標値に近づくように前記車両を駆動する制御情報を生成すること、及び
前記制御情報及び前記車両に前記計測情報を送信させる送信指示を前記車両に送信すること、
を行っており、
前記制御情報及び前記送信指示を前記車両に送信するか否かを、前記計測情報と前記目標値との差分である制御誤差、及び前記計測情報の情報鮮度に基づいて判定すること
を特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本電信電話株式会社
モード間損失差補償器
2日前
日本電信電話株式会社
光ファイバ特性解析装置
1日前
日本電信電話株式会社
光ファイバ特性解析装置
1日前
日本電信電話株式会社
モード回転子及びモード合分波器
今日
日本電信電話株式会社
解析装置、解析方法および解析プログラム
今日
日本電信電話株式会社
図形配置装置、図形配置方法及びプログラム
6日前
東日本電信電話株式会社
制御システム、制御方法、および制御プログラム
今日
日本電信電話株式会社
音響システム
今日
富士通株式会社
リソース割当て装置、リソース割当て方法、およびリソース割当てプログラム
今日
日本電信電話株式会社
参照画像キャッシュメモリ、プリフェッチ用データ要求方法、及びプリフェッチ用データ要求プログラム
6日前
NTTテクノクロス株式会社
音声認識モデル追加学習装置、音声認識モデル追加学習方法、及びプログラム
今日
日本電信電話株式会社
単語対応装置、学習装置、単語対応方法、学習方法、及びプログラム
今日
個人
コンテナ輸送システム
7か月前
日本信号株式会社
検査装置
3か月前
東光産業株式会社
電動台車
9か月前
株式会社新陽社
発車標
7か月前
コイト電工株式会社
暖房装置
8か月前
コイト電工株式会社
暖房装置
8か月前
コイト電工株式会社
座席装置
9か月前
日本信号株式会社
ホーム柵装置
6日前
日本車輌製造株式会社
鉄道車両
7か月前
日本車輌製造株式会社
鉄道車両
7か月前
近畿車輌株式会社
鉄道車両の床構造
4か月前
保線機器整備株式会社
保線用カート
2か月前
カヤバ株式会社
鉄道車両用制振装置
3か月前
カヤバ株式会社
鉄道車両用制振装置
8か月前
近畿車輌株式会社
鉄道車両の床構造
4か月前
川崎車両株式会社
鉄道車両用パネル
1か月前
近畿車輌株式会社
鉄道車両の床構造
4か月前
日本信号株式会社
物体検知装置
3日前
日本信号株式会社
踏切道監視システム
4か月前
日本信号株式会社
ホーム安全システム
7日前
シャープ株式会社
表示装置
5か月前
株式会社ダイフク
搬送設備
6か月前
ヤマハ発動機株式会社
無人搬送車
6日前
株式会社ダイフク
搬送設備
9か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ