TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024174552
公報種別
公開特許公報(A)
公開日
2024-12-17
出願番号
2023092436
出願日
2023-06-05
発明の名称
遠隔制御システム
出願人
日本電信電話株式会社
,
個人
代理人
個人
,
個人
,
個人
主分類
G05D
1/00 20240101AFI20241210BHJP(制御;調整)
要約
【課題】本開示の目的は、移動体を遠隔から制御するイベント駆動型の遠隔制御システムにおいて、制御性能を一定レベルに保ちつつ、制御情報の送受信に関わる通信トラヒックを削減可能にすることにある。
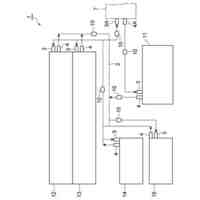
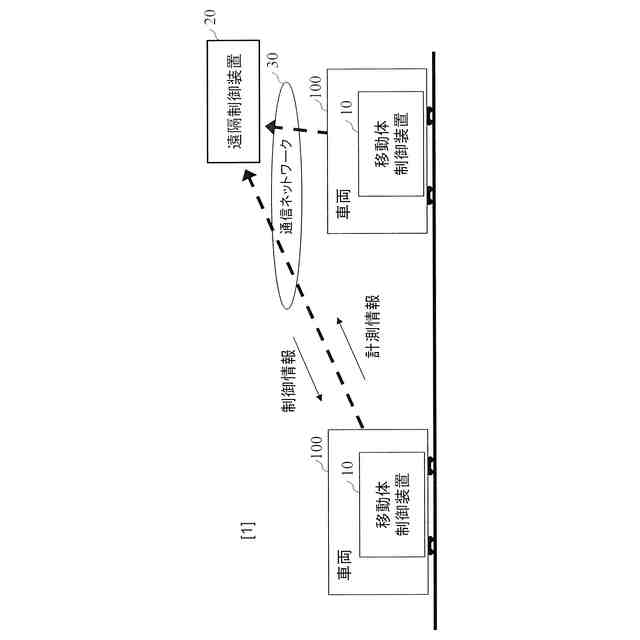
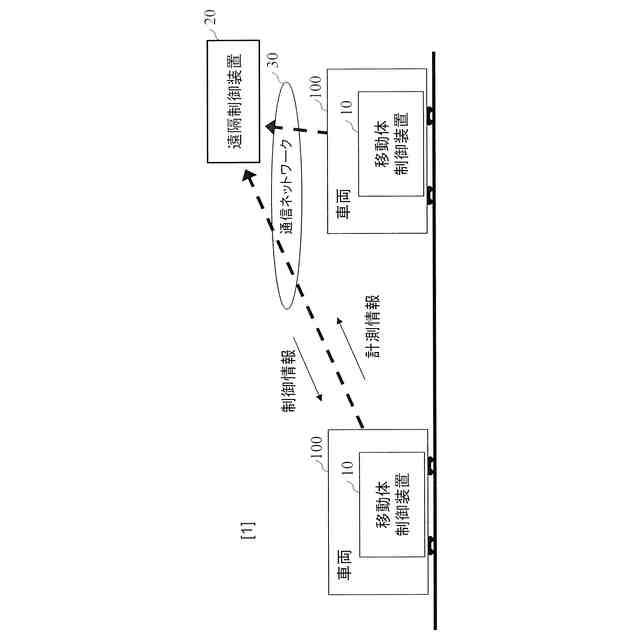
【解決手段】本開示は、移動体に搭載される1以上の移動体制御装置と、前記移動体を制御する制御情報を生成し、前記移動体制御装置へ送信する遠隔制御装置と、を備える遠隔制御システムであって、前記移動体制御装置は、制御情報を受信する受信部と、前記受信部で受信した制御情報に従って、前記移動体を制御する制御部と、前記移動体で計測された計測情報を送信する送信部と、を備え、前記送信部は、前記計測情報の情報鮮度に基づいて、前記計測情報を送信するか否かを判定する。
【選択図】図1
特許請求の範囲
【請求項1】
移動体を制御する制御情報を受信する受信部と、
前記受信部で受信した制御情報に従って、前記移動体を制御する制御部と、
前記移動体で計測された計測情報を送信する送信部と、
を備え、
前記送信部は、前記計測情報の情報鮮度に基づいて、前記計測情報を送信するか否かを判定する、
移動体制御装置。
続きを表示(約 770 文字)
【請求項2】
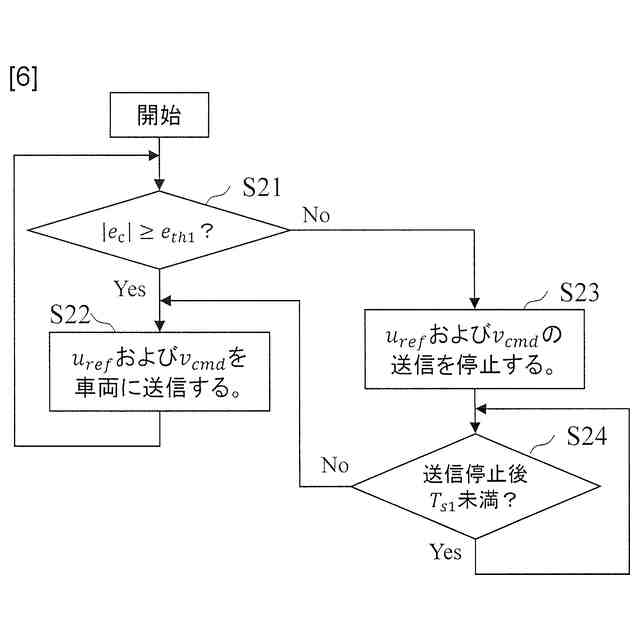
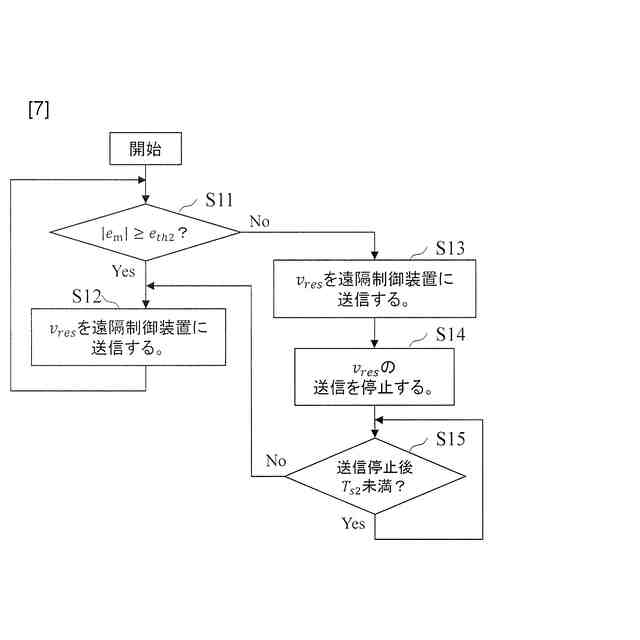
前記送信部は、前記計測情報の計測時からの経過時間を用いて定められる評価値を算出し、前記評価値が予め定められたしきい値に達したときに、前記計測情報を送信する、
請求項1に記載の移動体制御装置。
【請求項3】
前記送信部は、異なる時間に計測された複数の前記計測情報を用いて定められる評価値を算出し、前記評価値が予め定められたしきい値に達したときに、前記計測情報を送信する、
請求項1に記載の移動体制御装置。
【請求項4】
請求項1から3のいずれかに記載の移動体制御装置が搭載されている移動体。
【請求項5】
移動体に搭載される、請求項1から3のいずれかに記載の移動体制御装置と、
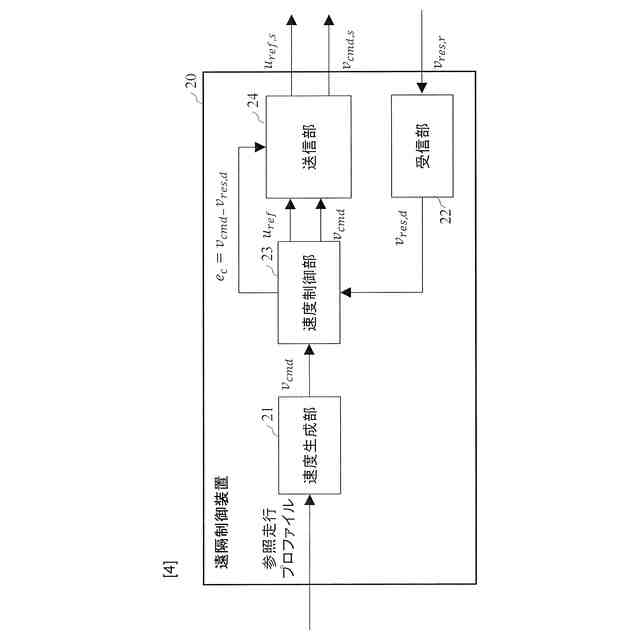
前記移動体を制御する制御情報を生成し、前記移動体制御装置へ送信する遠隔制御装置と、
を備える遠隔制御システムであって、
前記移動体制御装置は、前記制御情報を送信させる送信指示を、前記計測情報と共に送信し、
前記遠隔制御装置は、前記送信指示を受信すると、前記制御情報を前記移動体制御装置に送信する、
遠隔制御システム。
【請求項6】
受信部が、移動体を制御する制御情報を受信する手順と、
制御部が、前記受信部で受信した制御情報に従って、前記移動体を制御する手順と、
送信部が、前記移動体で計測された計測情報を送信する手順と、
を備え、
前記送信部は、前記計測情報の情報鮮度に基づいて、前記計測情報を送信するか否かを判定する、
方法。
【請求項7】
請求項1から3のいずれかに記載の移動体制御装置に備わる各機能部としてコンピュータを実現させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、移動体を遠隔から制御する遠隔制御システムに関する技術である。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
鉄道車両の制御を効率的に実現する手法として、車両と地上装置との間の通信を利用するCBTC(Communication-Based Train Control)がある。CBTCを用いて車両の遠隔制御を実現する場合、通信ネットワークの品質(遅延、データ損失など)が制御性能に大きな影響を及ぼすことが知られている。また、データが取得されてからの経過時刻を表す情報の鮮度(AoI:Age of Information)はネットワーク遅延だけでなく装置内の情報処理遅延も含み、制御性能を維持する指標として重要となるため、CBTCシステムにおけるAoIの最適化手法が提案されている(例えば、非特許文献1参照。)。
【0003】
一方、CBTCでは車両数や各種アプリケーション数の増大により通信トラヒックの増大が見込まれる。通信トラヒックを削減する手法として、モータの遠隔制御システムにおいて制御誤差に基づいてデータの送信タイミングを制御するイベント駆動型の制御手法が提案されている(例えば、非特許文献2参照。)。
【先行技術文献】
【非特許文献】
【0004】
X. Wang, L. Liu, L. Zhu, and T. Tang, “Train -Centric CBTC Meets Age of Information in Train-to Train Communications,” IEEE Transactions on Intelligent Transportation Systems, Vol.21, No.10, pp. 4072-4085, Oct 2020.
T. Yamanaka, T. Iwai, and R. Kubo, “Quality of Performance Aware Data Transmission for Energy-Efficient Networked Control,” IEEE Access, Vol. 9, pp. 5769-5778, January 2021.
【発明の概要】
【発明が解決しようとする課題】
【0005】
CBTCの通信トラヒック削減に前記イベント駆動型の制御手法を用い、制御誤差に基づいてデータの送信タイミングを制御することが考えられる。しかしながら、フィードバック制御ループ内に通信ネットワークが存在するネットワーク化制御システムにおいて制御誤差に基づいたしきい値を用いてデータを送信するか否かを判定する場合、フィードバック経路のデータ送信が停止されている状態では遠隔制御装置側でリアルタイムに制御誤差が計算できずに、制御性能が劣化してしまうという課題があった。
【0006】
本開示は、このような問題点に鑑みてなされたものであり、本開示の目的は、移動体を遠隔から制御するイベント駆動型の遠隔制御システムにおいて、制御性能を一定レベルに保ちつつ、制御情報の送受信に関わる通信トラヒックを削減可能にすることにある。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本開示の遠隔制御システムは、1以上の移動体を遠隔制御装置が制御する遠隔制御システムにおいて、AoIに基づいてフィードバック制御ループのデータ送信を行う。
【0008】
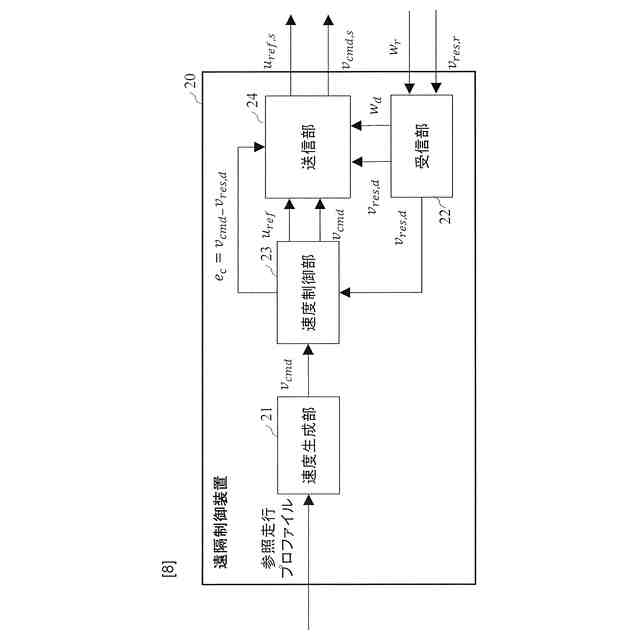
本開示の遠隔制御システムは、前記移動体を制御する移動体制御装置を備えていてもよい。この場合、本開示の遠隔制御システムは、1以上の移動体に搭載される1以上の移動体制御装置と、前記移動体を制御する制御情報を生成し、前記移動体制御装置へ送信する遠隔制御装置と、を備える遠隔制御システムにおいて、前記移動体制御装置及び前記遠隔制御装置の少なくともいずれかが、AoIに基づいてフィードバック制御ループのデータ送信を行う。
【0009】
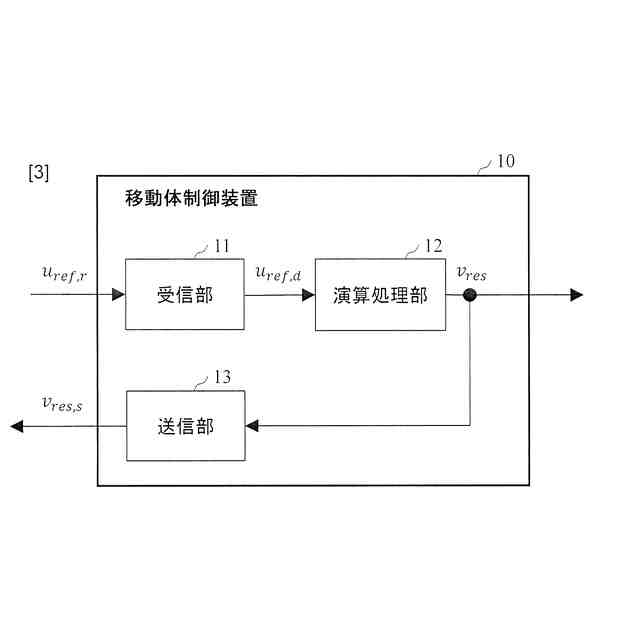
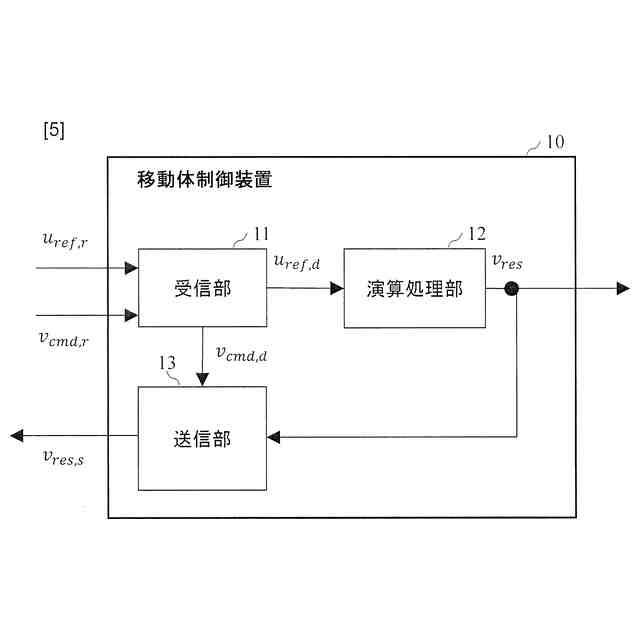
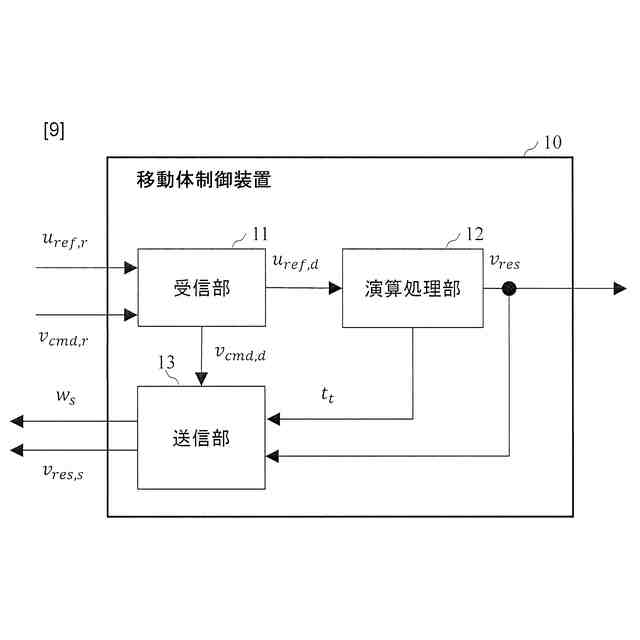
本開示の移動体制御装置は、移動体に搭載される移動体制御装置であって、
移動体を制御する制御情報を受信する受信部と、
前記受信部で受信した制御情報に従って、前記移動体を制御する制御部と、
前記移動体で計測された計測情報を送信する送信部と、
を備え、
前記送信部は、前記計測情報の情報鮮度に基づいて、前記計測情報を送信するか否かを判定する。
【0010】
本開示の方法は、移動体に搭載される移動体制御装置が実行する方法であって、
受信部が、移動体を制御する制御情報を受信する手順と、
制御部が、前記受信部で受信した制御情報に従って、前記移動体を制御する手順と、
送信部が、前記移動体で計測された計測情報を送信する手順と、
を備え、
前記送信部は、前記計測情報の情報鮮度に基づいて、前記計測情報を送信するか否かを判定する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
方向検出器
2か月前
ugo株式会社
移動体
2か月前
村田機械株式会社
産業機械
6日前
株式会社ダイヘン
移動体
1か月前
株式会社ダイヘン
移動体
1か月前
神港テクノス株式会社
制御装置
1か月前
トヨタ自動車株式会社
自律移動体
6日前
トヨタ自動車株式会社
自律移動体
2か月前
株式会社クボタ
作業車
6日前
トヨタ自動車株式会社
配送システム
1か月前
株式会社フジキン
流体制御装置
1か月前
株式会社明電舎
車両
6日前
アズビル株式会社
パラメータ調整装置
15日前
トヨタ自動車株式会社
自律移動システム
2か月前
トヨタ自動車株式会社
ロボットシステム
6日前
トヨタ自動車株式会社
位置推定システム
2か月前
トヨタ自動車株式会社
ロボットシステム
14日前
株式会社ダイフク
搬送設備
1か月前
株式会社FUJI
工作機械の操作システム
2か月前
ローム株式会社
電源回路
1か月前
ローム株式会社
電源回路
1か月前
キヤノン株式会社
情報処理装置
14日前
株式会社ダイフク
物品搬送設備
1か月前
村田機械株式会社
搬送車システム
1か月前
トヨタ自動車株式会社
群制御システム及び方法
1か月前
旭精機工業株式会社
監視データ処理装置
今日
東フロコーポレーション株式会社
流量制御装置
1か月前
株式会社ダイフク
情報表示システム
1か月前
ブラザー工業株式会社
数値制御装置及び工作機械
6日前
ローム株式会社
リニア電源
1か月前
株式会社日立製作所
移動体制御システム
1か月前
ローム株式会社
放電回路および電源システム
1か月前
ローム株式会社
リニア電源
1か月前
株式会社ディスコ
搬送車
14日前
花王株式会社
物品の製造方法
1か月前
ローム株式会社
定電圧生成回路
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ