TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024170654
公報種別
公開特許公報(A)
公開日
2024-12-10
出願番号
2024160892,2022546865
出願日
2024-09-18,2020-11-02
発明の名称
基板搬送ロボットシステム
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
H01L
21/677 20060101AFI20241203BHJP(基本的電気素子)
要約
【課題】配線の複雑化およびアームの大型化(基板搬送ロボットの大型化)を抑制することが可能な基板搬送ロボットシステムを提供する。
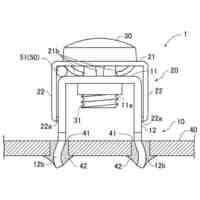
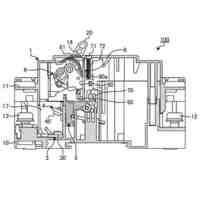
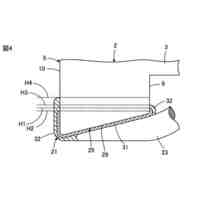
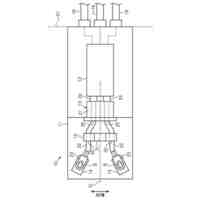
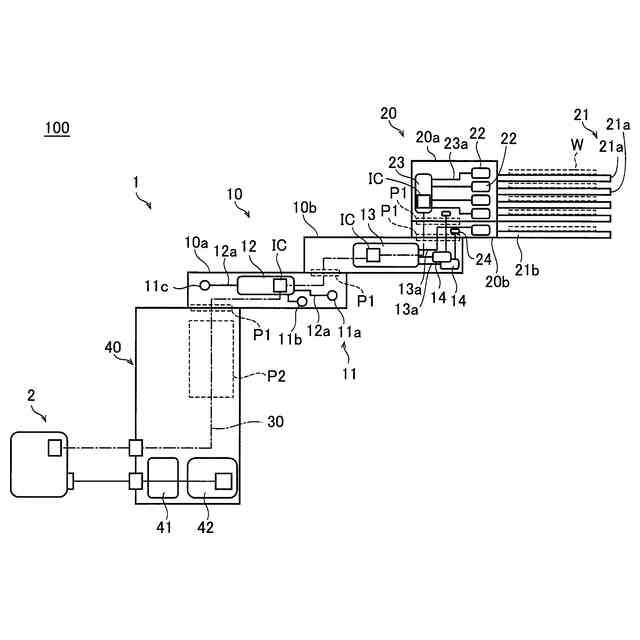
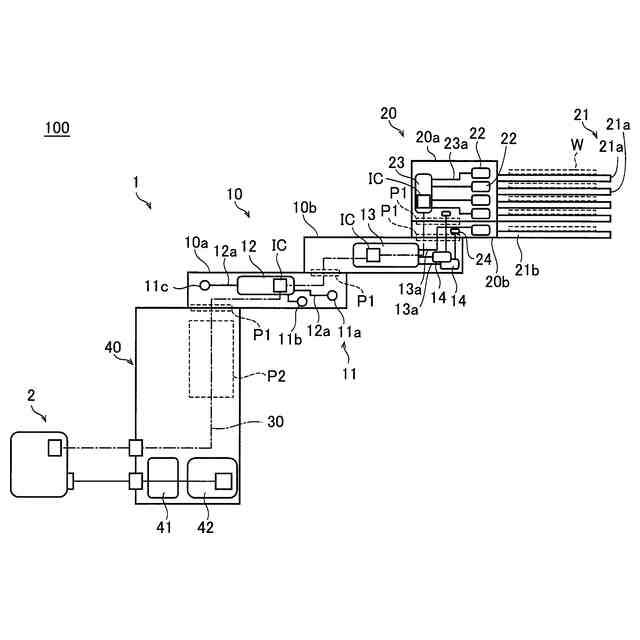
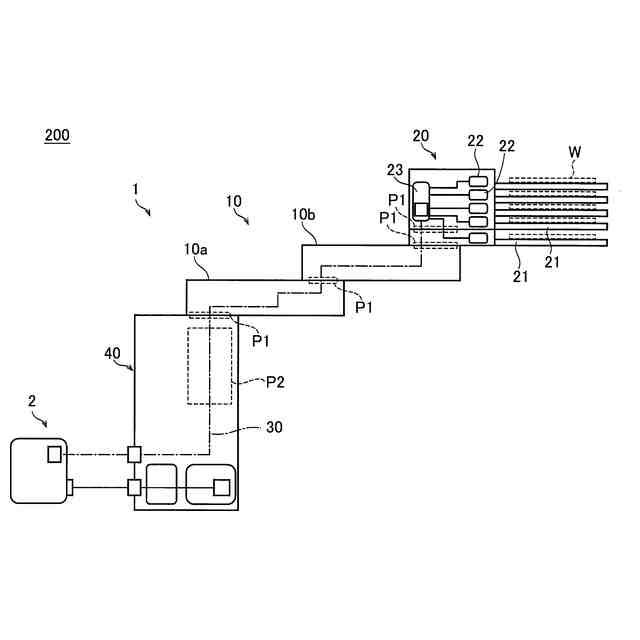
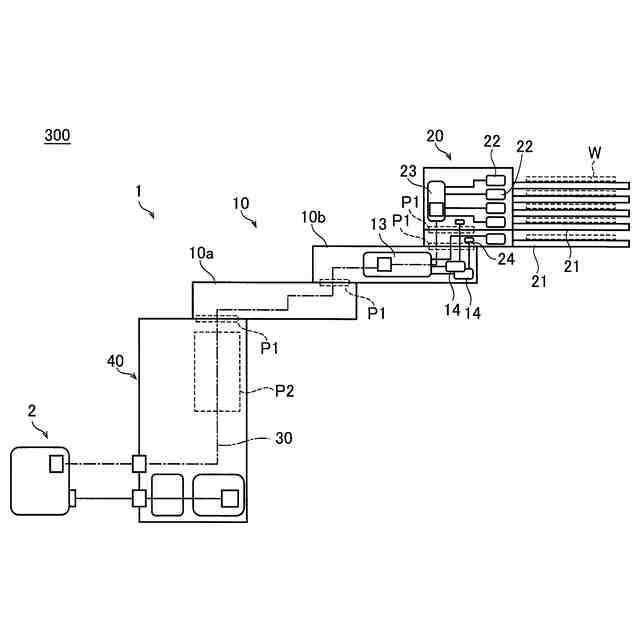
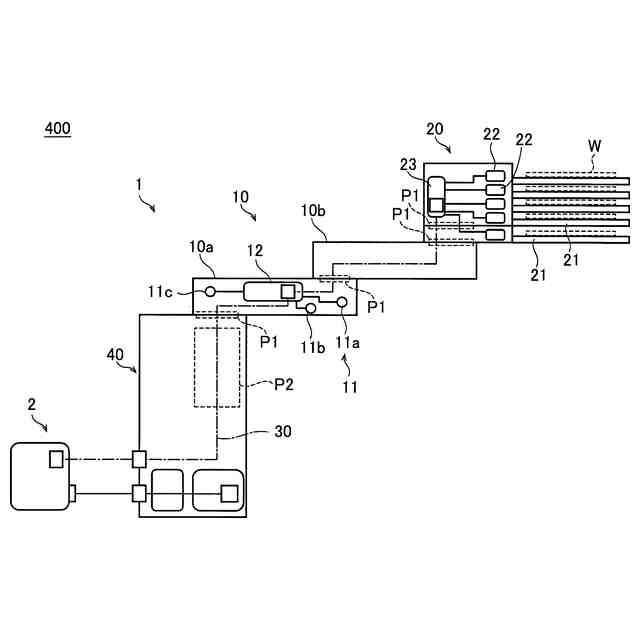
【解決手段】基板搬送ロボットシステム100において、基板搬送ロボット1は、基板保持ハンド20に設けられるハンド用センサ22と、基板保持ハンド20に設けられ、ハンド用センサ22に接続されるハンド回路基板23と、を含み、ロボット制御部2とハンド回路基板23との間は、アーム10内部のアーム回路基板12、13を介して、シリアル通信接続されている。
【選択図】図2
特許請求の範囲
【請求項1】
基板搬送ロボットと、
前記基板搬送ロボットを制御するロボット制御部とを備え、
前記基板搬送ロボットは、
アームと、
前記アームによって移動されるとともに前記アームに対して回動可能に接続され、基板を支持するブレードを含む基板保持ハンドと、
前記基板保持ハンドに設けられるハンド用センサと、
前記基板保持ハンドに設けられ、前記ハンド用センサに接続されるハンド回路基板と、を含み、
前記ロボット制御部と前記ハンド回路基板との間は、前記アームの内部、および、前記基板保持ハンドと前記アームとが相対的に可動する可動部に設けられた筒状の部材を介して、シリアル通信接続されている、基板搬送ロボットシステム。
続きを表示(約 1,100 文字)
【請求項2】
前記アームに設けられるアーム用センサと、
前記アームに設けられ、前記アーム用センサと前記ハンド用センサとのうちの少なくとも一方に接続されるアーム回路基板とをさらに備え、
前記ロボット制御部と、前記アーム回路基板と、前記ハンド回路基板との間は、前記アームの内部を介して、デイジーチェーン接続によりシリアル通信接続されている、請求項1に記載の基板搬送ロボットシステム。
【請求項3】
前記ロボット制御部と、前記アーム回路基板と、前記ハンド回路基板との間は、前記アームの内部、および、前記基板保持ハンドと前記アームとが相対的に可動する前記可動部を介して、前記デイジーチェーン接続によりシリアル通信接続されている、請求項2に記載の基板搬送ロボットシステム。
【請求項4】
前記アームは、一方端部を回動中心として回動可能に構成された第1アームと、一方端部が前記第1アームの他方端部に回動可能に接続され、前記第1アームに対して回動可能に構成されるとともに前記基板保持ハンドが接続される第2アームとを含み、
前記アーム回路基板は、前記第1アームと前記第2アームとのうちの少なくとも一方に設けられている、請求項2に記載の基板搬送ロボットシステム。
【請求項5】
前記アーム回路基板は、前記第1アームに設けられる第1アーム回路基板と、前記第2アームに設けられる第2アーム回路基板とを含む、請求項4に記載の基板搬送ロボットシステム。
【請求項6】
前記アーム用センサは、アナログセンサを含み、
前記第1アーム回路基板と前記第2アーム回路基板とのうちの少なくとも一方は、前記アナログセンサからの信号が入力されるアナログ入力回路基板を含む、請求項5に記載の基板搬送ロボットシステム。
【請求項7】
前記アナログセンサは、前記アームの関節に設けられるモータの回転以外を検知するセンサである、請求項6に記載の基板搬送ロボットシステム。
【請求項8】
前記アナログセンサは、温度センサと、加速度センサと、圧力センサとのうちの少なくとも1つを含む、請求項7に記載の基板搬送ロボットシステム。
【請求項9】
前記第2アーム回路基板は、前記ハンド用センサに接続され前記ハンド用センサとの間で信号を送受信するデジタル入出力回路基板を含む、請求項5に記載の基板搬送ロボットシステム。
【請求項10】
前記第2アームに設けられ、前記デジタル入出力回路基板との間で信号を送受信し、前記基板保持ハンドに設けられるシリンダに送られる空気を調整する電磁バルブをさらに備える、請求項9に記載の基板搬送ロボットシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この発明は、基板搬送ロボットシステムに関し、特に、基板保持ハンドに設けられるハンド用センサを備える基板搬送ロボットシステムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来、基板搬送ハンドを備える基板搬送ロボットが知られている。このような、基板搬送ロボットは、たとえば、特開2013-69914号公報に開示されている。
【0003】
特開2013-69914号公報には、水平多関節ロボットから構成される基板搬送ロボットが開示されている。この基板搬送ロボットは、基台と、基台に接続され水平面内において回転するアームと、アームに接続され水平面内で回転する基板搬送ハンドとを備えている。また、基板搬送ロボットには、制御装置が接続されている。制御装置は、基板搬送ロボットの起動や停止の動作を制御する。これにより、基板搬送ロボットによって基板が搬送される。
【0004】
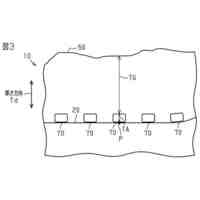
また、特開2013-69914号公報には明記されていないが、特開2013-69914号公報に記載のような従来の基板搬送ロボットでは、基板搬送ハンドに保持された基板を検知するためのセンサが基板搬送ハンドに設けられている場合がある。この場合、センサからの信号は、アームの内部を介する配線によって制御装置に送信される。
【先行技術文献】
【特許文献】
【0005】
特開2013-69914号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上記センサが設けられている基板搬送ロボットにおいて、センサの各々からアームの内部を介してロボット制御部と通信する場合、センサの数の分の配線が、基板保持ハンドからアームの内部を介して制御装置側に挿通される。このため、配線が複雑化するとともに、アームの内部を比較的大きくする必要があり、基板搬送ロボットが大型化するという問題点がある。
【0007】
この発明は、上記のような課題を解決するためになされたものであり、この発明の1つの目的は、配線の複雑化およびアームの大型化(基板搬送ロボットの大型化)を抑制することが可能な基板搬送ロボットシステムを提供することである。
【課題を解決するための手段】
【0008】
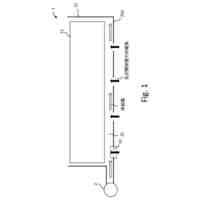
上記目的を達成するために、この発明の一の局面による基板搬送ロボットシステムは、基板搬送ロボットと、基板搬送ロボットを制御するロボット制御部とを備え、基板搬送ロボットは、アームと、アームによって移動されるとともにアームに対して回動可能に接続され、基板を支持するブレードを含む基板保持ハンドと、基板保持ハンドに設けられるハンド用センサと、基板保持ハンドに設けられ、ハンド用センサに接続されるハンド回路基板と、を含み、ロボット制御部とハンド回路基板との間は、アームの内部、および、基板保持ハンドとアームとが相対的に可動する可動部に設けられた筒状の部材を介して、シリアル通信接続されている。
【0009】
この発明の一の局面による基板搬送ロボットシステムでは、上記のように、ロボット制御部と、ハンド用センサに接続されるハンド回路基板との間は、アームの内部を介して、シリアル通信接続されている。これにより、ロボット制御部とハンド回路基板とをシリアル通信接続するための比較的少ない数の配線によって、ハンド用センサとロボット制御部との通信を行うことができる。なお、ハンド用センサが複数設けられた場合でも、複数のハンド用センサとハンド回路基板との間は、複数の配線によって接続される一方、ロボット制御部とハンド回路基板との間は、比較的少ない数の配線によって通信される。その結果、配線が少ない分、配線の複雑化およびアームの大型化(基板搬送ロボットの大型化)を抑制することができる。
【0010】
また、ハンド用センサとハンド回路基板との間の配線の長さが比較的短くなるので、配線が長くなることに起因して外部からのノイズの影響が大きくなるのを抑制することができる。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
電波吸収体
10日前
東レ株式会社
二次電池
1日前
愛知電機株式会社
変圧器
8日前
電建株式会社
端子金具
15日前
SMK株式会社
コネクタ
15日前
株式会社カネカ
接着加工装置
10日前
太陽誘電株式会社
全固体電池
10日前
富士電機株式会社
半導体装置
15日前
三菱電機株式会社
回路遮断器
15日前
株式会社水素パワー
接続構造
10日前
株式会社カネカ
接着加工装置
10日前
三菱電機株式会社
端子カバー
1日前
TDK株式会社
電子部品
22日前
トヨタ自動車株式会社
二次電池
15日前
日本特殊陶業株式会社
保持装置
15日前
日機装株式会社
半導体発光装置
8日前
株式会社村田製作所
コイル部品
8日前
個人
電波散乱方向制御板
1日前
日本電気株式会社
波長可変レーザ
14日前
三洋化成工業株式会社
高分子固体電解質
10日前
住友電装株式会社
コネクタ
1日前
株式会社島津製作所
X線撮影装置
15日前
株式会社ダイヘン
搬送装置
15日前
株式会社三桂製作所
耐火コネクタ
21日前
三菱製紙株式会社
熱暴走抑制耐火シート
9日前
日新イオン機器株式会社
イオン注入装置
3日前
トヨタ自動車株式会社
セルケース
15日前
日本電気株式会社
半導体光増幅素子
14日前
株式会社村田製作所
電子部品
22日前
トヨタ自動車株式会社
短絡検知方法
15日前
マクセル株式会社
扁平形電池
8日前
三菱電機株式会社
半導体装置
22日前
富士電機株式会社
半導体装置
1日前
マクセル株式会社
全固体電池
15日前
トヨタ自動車株式会社
電池温調装置
1日前
ローム株式会社
信号伝達装置
15日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ