TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024170567
公報種別
公開特許公報(A)
公開日
2024-12-10
出願番号
2024153843,2020218045
出願日
2024-09-06,2020-12-25
発明の名称
作業車両の制御システム
出願人
井関農機株式会社
代理人
主分類
A01B
69/00 20060101AFI20241203BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】進入禁止領域を迂回しつつ作業開始点への移動の効率化を図り、作業効率を向上させること。
【解決手段】実施形態に係る作業車両の制御システムは、作業経路に沿って自律走行しながら作業を行うよう走行車体を制御する制御部を備え、制御部は走行車体の移動時の旋回半径と、圃場内の進入禁止領域と逸脱禁止領域を設定し、進入禁止領域と逸脱禁止領域の各頂点が凸状頂点か凹状頂点か判定し、走行車体の前記自己位置から前記作業開始点までの移動経路を設定し、移動経路が進入禁止領域に入る場合、進入禁止領域に進入する移動経路を、進入禁止領域の凸状頂点に設定した迂回円を経由するように修正し、移動経路が逸脱禁止領域から逸脱する場合、移動経路を、逸脱禁止領域の凹状頂点に設定した迂回円を経由するように修正し、迂回円は前記進入禁止領域の凹状頂点および前記逸脱禁止領域の凸状頂点には設定しない。
【選択図】図10
特許請求の範囲
【請求項1】
圃場内を走行可能な走行車体と、
前記走行車体の自己位置を取得する測位装置と、
前記走行車体の方位角を取得する方位角取得手段と、
前記圃場内の作業開始点を含む作業経路を生成し、生成した前記作業経路に沿って自律走行しながら作業を行うよう前記走行車体を制御する制御部とを備え、
前記制御部は、
前記走行車体の前記圃場内における移動時の旋回半径と、前記圃場内の閉じた多角形の内側領域として前記走行車体の進入を禁止する進入禁止領域とを予め設定し、
前記進入禁止領域の外側領域に逸脱禁止領域を設定し、
前記進入禁止領域の各頂点が凸状頂点か凹状頂点か判定し、
前記逸脱禁止領域の各頂点が凸状頂点か凹状頂点か判定し、
前記走行車体の前記自己位置から前記作業開始点までの移動経路を設定し、
前記移動経路が前記進入禁止領域に入る場合、
前記進入禁止領域に進入する移動経路を、進入禁止領域の凸状頂点に設定した迂回円を経由するように修正し、
前記移動経路が前記逸脱禁止領域から逸脱する場合、前記移動経路を、前記逸脱禁止領域の凹状頂点に設定した迂回円を経由するように修正し、
迂回円は前記進入禁止領域の凹状頂点および前記逸脱禁止領域の凸状頂点には設定しないこと
を特徴とする作業車両の制御システム。
続きを表示(約 140 文字)
【請求項2】
前記進入禁止領域の各頂点は順番が指定されており、前記移動経路の修正は指定された順番に基づいて、前記作業開始点に隣接する凸状頂点から昇順または降順に順次前記迂回円を経由するように修正していくこと
を特徴とする請求項1に記載の作業車両の制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両の制御システムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
従来、自律走行が可能な農業用トラクタなどの作業車両において、作業車両を自律走行させる作業経路を設定する場合、作業車両が自律走行を開始可能な自律走行候補経路を特定する特定部によって、候補特定用領域を設定し、候補特定用領域に含まれる作業経路を自律走行候補経路として特定可能とする技術が知られている(たとえば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2018-147163号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記したような従来技術では、作業車両が自律走行を開始する位置(作業を開始する位置であり、以下、作業開始点という)が予め決定している場合に作業開始点への適切な移動経路を生成することができないため、作業開始点まで移動する際の効率化を図ることはできなかった。また、たとえば、作業開始点まで移動する際に進入したくない領域(進入禁止領域)があっても、進入禁止領域を迂回しつつ効率のよい移動経路を設定することはできなかった。すなわち、上記したような従来技術には、作業効率を向上させる点についてさらなる改善の余地があった。
【0005】
本発明は、上記に鑑みてなされたものであって、進入禁止領域を迂回しつつ作業開始点への移動の効率化を図ることができ、作業効率を向上させることができる作業車両の制御システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上述した課題を解決し、目的を達成するために、実施形態に係る作業車両の制御システムは、圃場内を走行可能な走行車体と、前記走行車体の自己位置を取得する測位装置と、前記走行車体の方位角を取得する方位角取得手段と、前記圃場内の作業開始点を含む作業経路を生成し、生成した前記作業経路に沿って自律走行しながら作業を行うよう前記走行車体を制御する制御部とを備え、前記制御部は、前記走行車体の前記圃場内における移動時の旋回半径と、前記圃場内の閉じた多角形の内側領域として前記走行車体の進入を禁止する進入禁止領域とを予め設定し、
前記進入禁止領域の外側領域に逸脱禁止領域を設定し、前記進入禁止領域の各頂点が凸状頂点か凹状頂点か判定し、前記逸脱禁止領域の各頂点が凸状頂点か凹状頂点か判定し、
前記走行車体の前記自己位置から前記作業開始点までの移動経路を設定し、前記移動経路が前記進入禁止領域に入る場合、
前記進入禁止領域に進入する移動経路を、進入禁止領域の凸状頂点に設定した迂回円を経由するように修正し、前記移動経路が前記逸脱禁止領域から逸脱する場合、前記移動経路を、前記逸脱禁止領域の凹状頂点に設定した迂回円を経由するように修正し、迂回円は前記進入禁止領域の凹状頂点および前記逸脱禁止領域の凸状頂点には設定しないこと
を特徴とする。
【発明の効果】
【0007】
実施形態に係る作業車両によれば、進入禁止領域を迂回しつつ作業開始点への移動の効率化を図ることができ、作業効率を向上させることができる。
【図面の簡単な説明】
【0008】
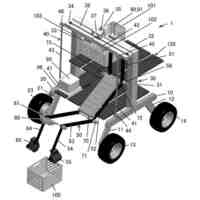
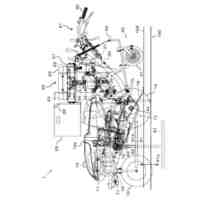
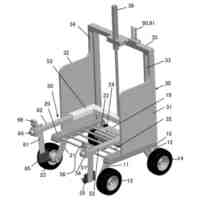
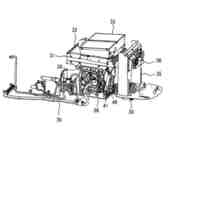
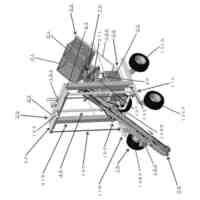
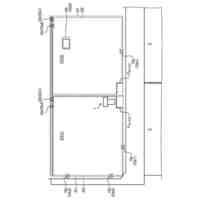
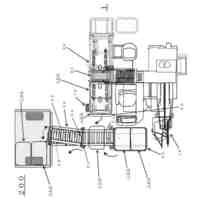
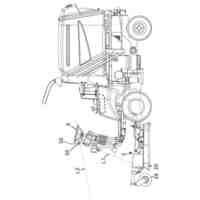
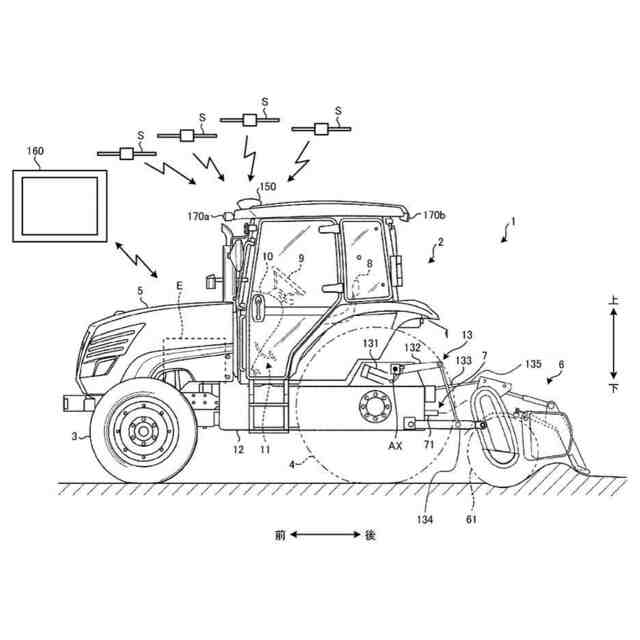
図1は、実施形態に係る作業車両を示す概略左側面図である。
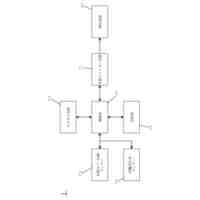
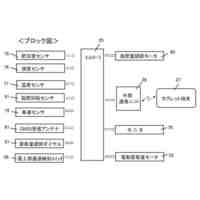
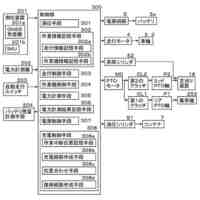
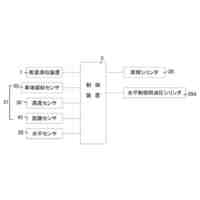
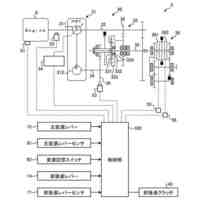
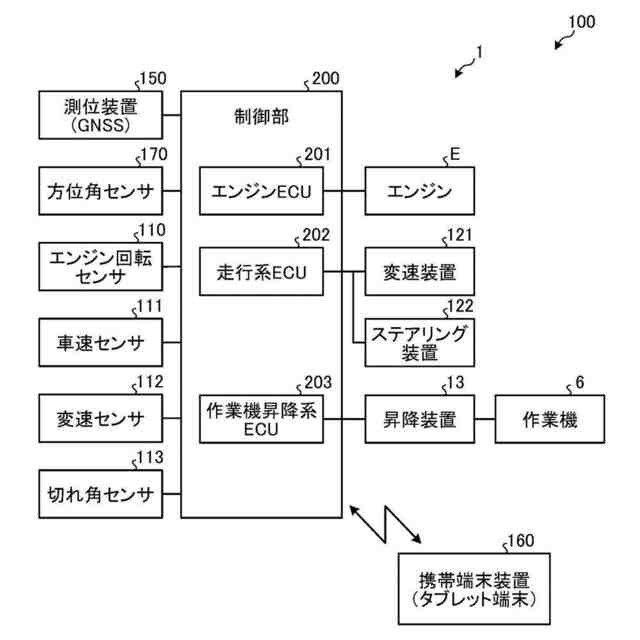
図2は、実施形態に係る作業車両の制御システムを示すブロック図である。
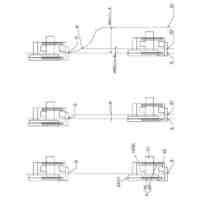
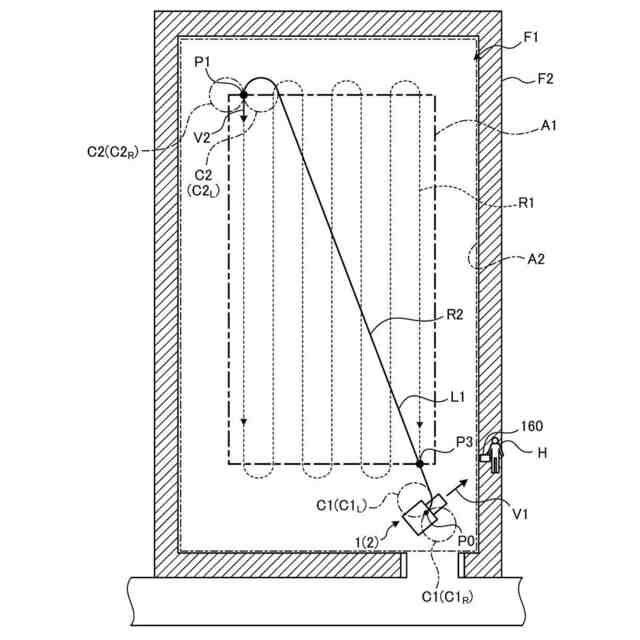
図3は、圃場内における自律走行の説明図(その1)である。
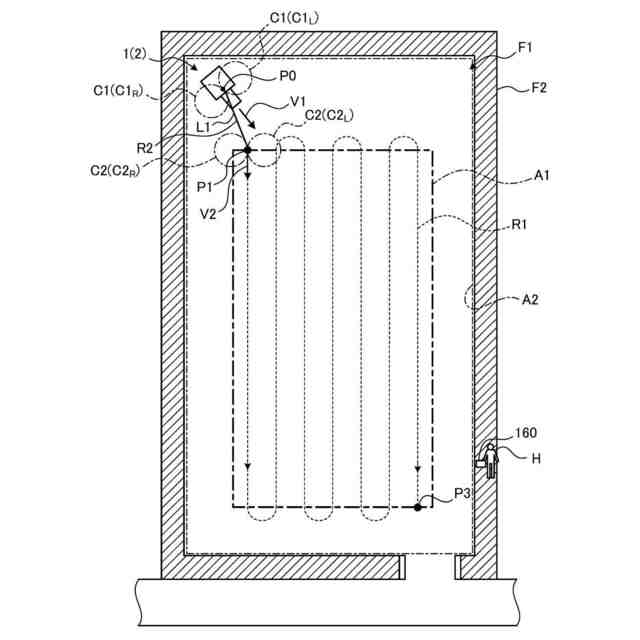
図4は、圃場内における自律走行の説明図(その2)である。
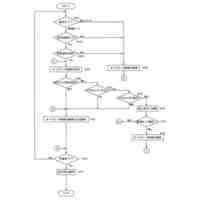
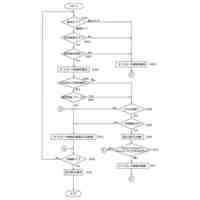
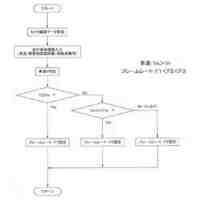
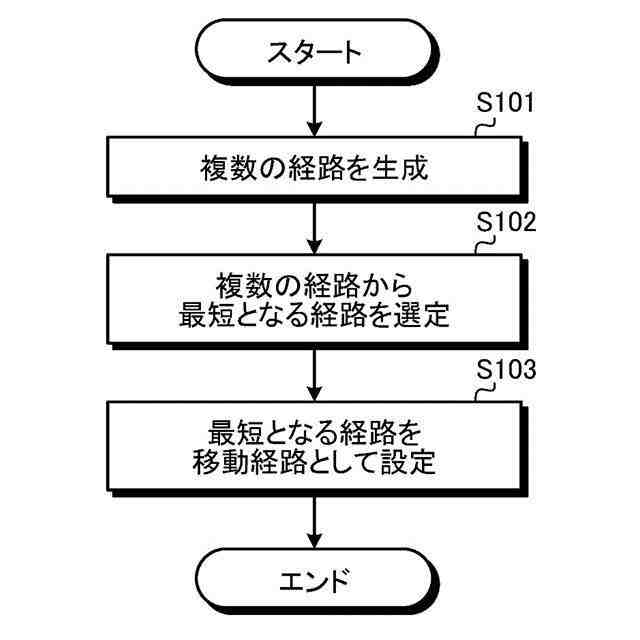
図5は、移動経路設定の処理を示すフローチャート(その1)である。
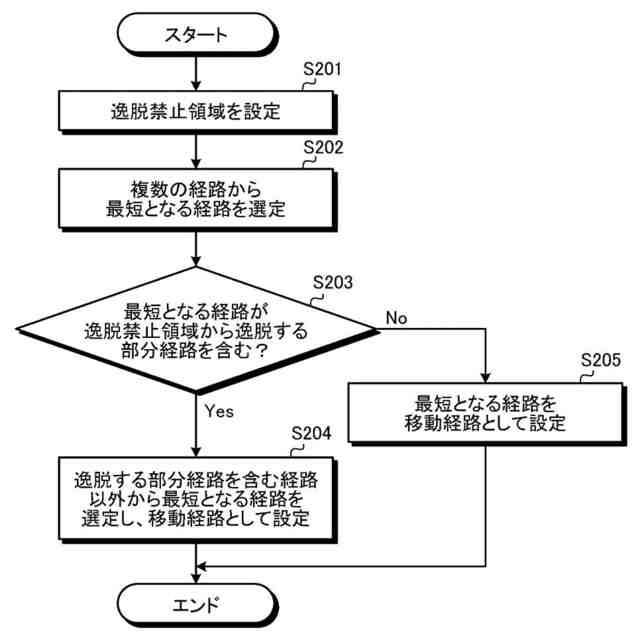
図6は、移動経路設定の処理を示すフローチャート(その2)である。
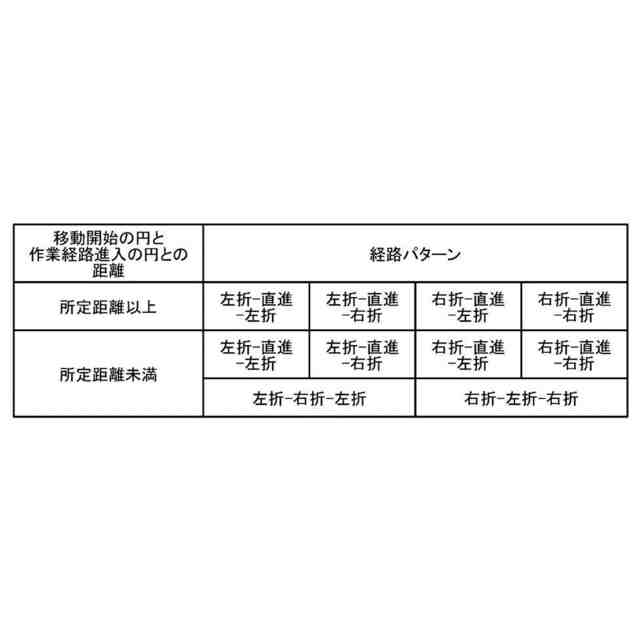
図7は、移動経路の経路パターンの説明図である。
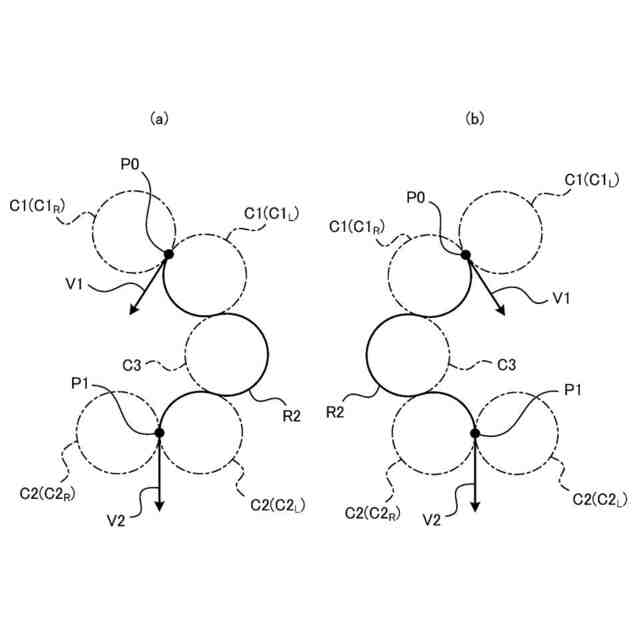
図8は、(a)左折-右折-左折の経路パターンの説明図であり、(b)右折-左折-右折の経路パターンの説明図である。
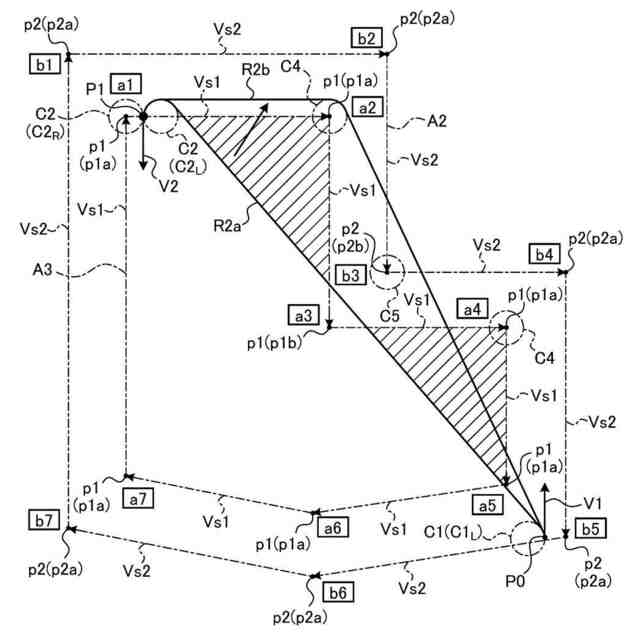
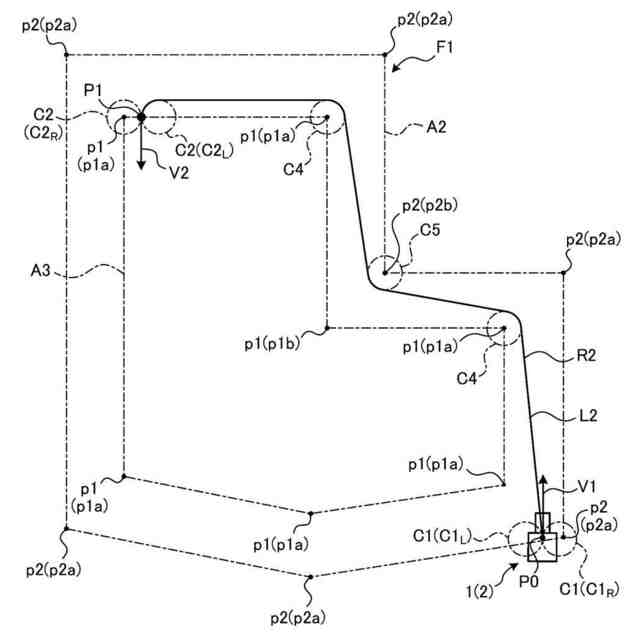
図9は、進入禁止領域や逸脱禁止領域を迂回する移動経路の説明図である。
図10は、進入禁止領域の迂回経路設定の説明図(その1)である。
図11は、進入禁止領域の迂回経路設定の説明図(その2)である。
図12は、逸脱禁止領域の迂回経路設定の説明図(その1)である。
図13は、逸脱禁止領域の迂回経路設定の説明図(その2)である。
【発明を実施するための形態】
【0009】
以下、添付図面を参照して本願の開示する作業車両の制御システムの実施形態を詳細に説明する。なお、以下に示す実施形態によりこの発明が限定されるものではない。
【0010】
<作業車両(トラクタ)の概要>
まず、図1を参照して実施形態に係る作業車両1の概要について説明する。図1は、実施形態に係る作業車両1を示す概略左側面図である。なお、以下では、作業車両1としてトラクタを例に説明する。また、作業車両であるトラクタ1は、自走しながら圃場で農作業を行う農業用トラクタである。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
井関農機株式会社
田植機
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
苗移植機
5日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
農作業機
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
5日前
井関農機株式会社
農作業車
1か月前
井関農機株式会社
作業車両
13日前
井関農機株式会社
作業車両
26日前
井関農機株式会社
作業車両
26日前
井関農機株式会社
作業車両
5日前
井関農機株式会社
作業車両
13日前
井関農機株式会社
作業車両
5日前
井関農機株式会社
エンジン
5日前
井関農機株式会社
作業車両
5日前
井関農機株式会社
乗用芝刈機
1か月前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
水田作業機
28日前
井関農機株式会社
圃場作業機
18日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ