TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024169655
公報種別
公開特許公報(A)
公開日
2024-12-05
出願番号
2024165878,2021120082
出願日
2024-09-25,2007-04-24
発明の名称
基板搬送ロボット
出願人
川崎重工業株式会社
代理人
個人
主分類
H01L
21/677 20060101AFI20241128BHJP(基本的電気素子)
要約
【課題】 位置決め精度を向上するとともに、外部の物体との干渉を防ぐことができる基板搬送ロボットを提供する。
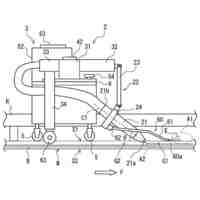
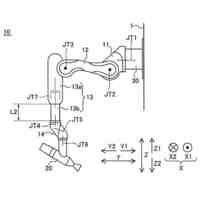
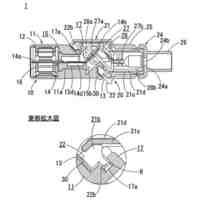
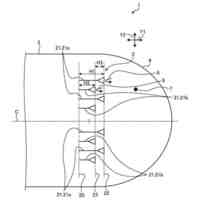
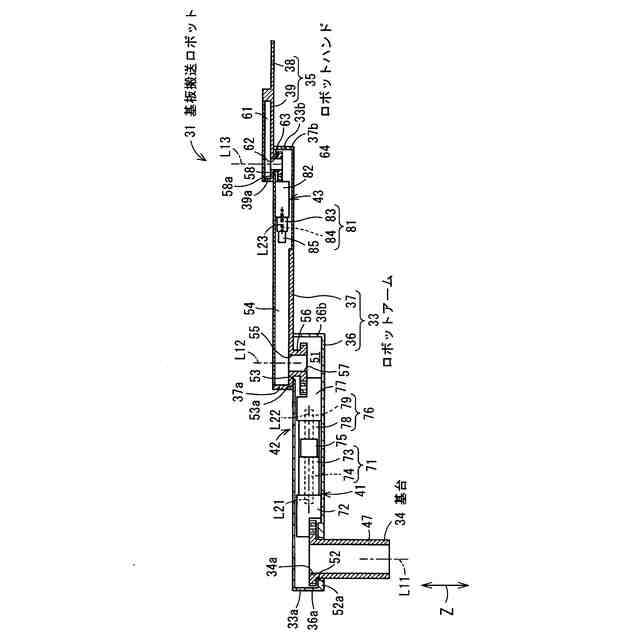
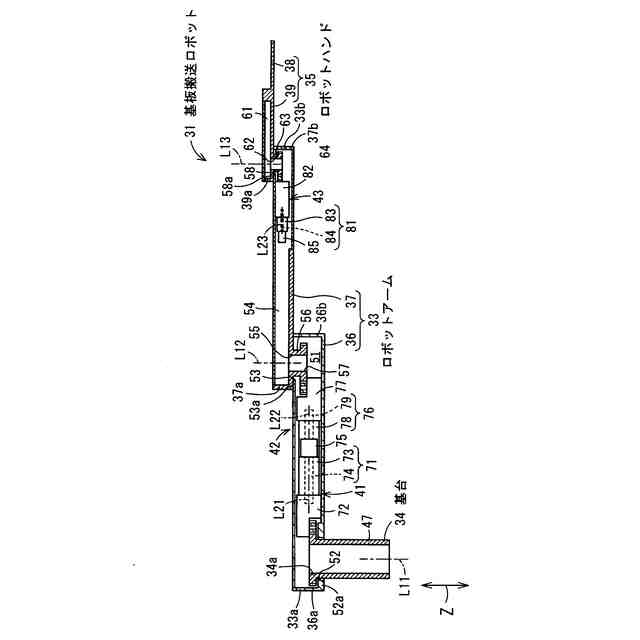
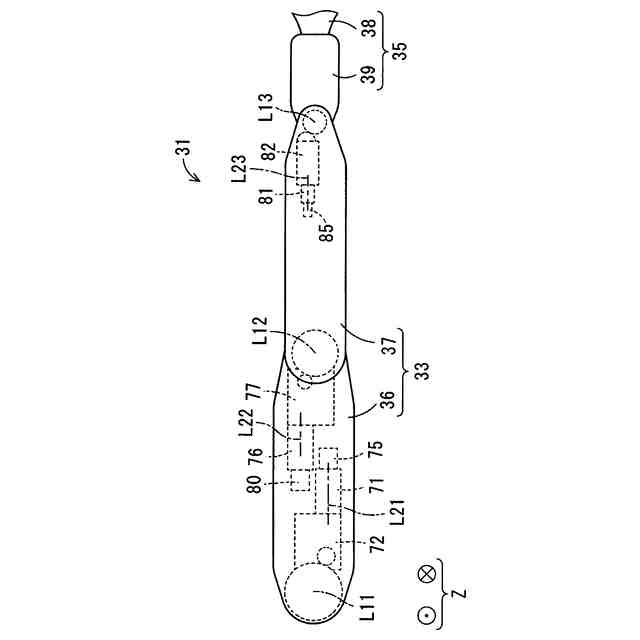
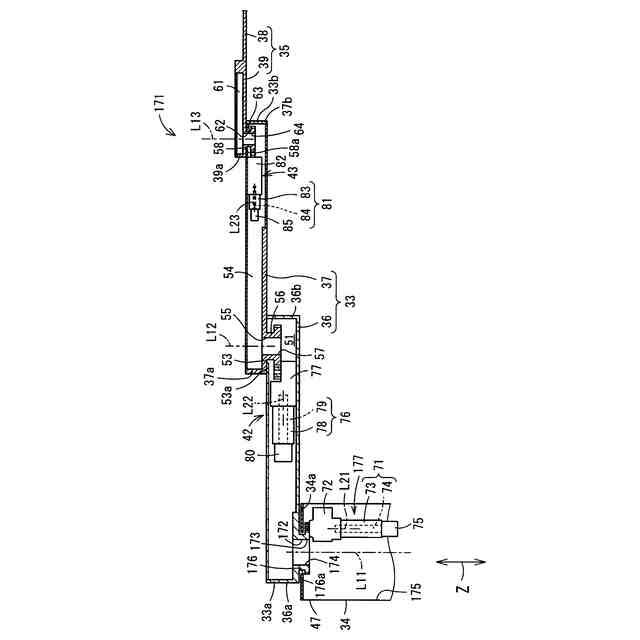
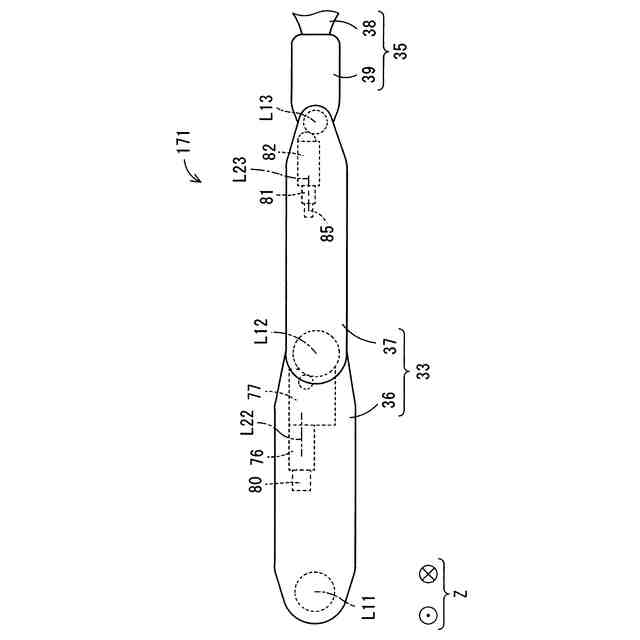
【解決手段】 第1および第2アーム部36,37は、互いに相対的に旋回可能に設けられる。第1および第2アーム部36,37間の関節には、第2旋回駆動手段42が設けられる。第2旋回駆動手段42は、第2モータ76と、第2動力伝達部77とを有する。第2モータ76は、第1アーム部36に固定される固定部78と、固定部78に対して、第1アーム部36の延在方向に略平行な回転軸線L22まわりに回転する回転部79とを有する。第2動力伝達部77は、第2モータ76と第2アーム部37との間に介在し、第2モータ76の動力を、第2モータ76の回転部79から第2アーム部37に伝達する。このような第2旋回駆動手段42によって、第1および第2アーム部36,37が互いに相対的に旋回駆動される。
【選択図】 図1
特許請求の範囲
【請求項1】
基台と、
基板を把持するロボットハンドと、
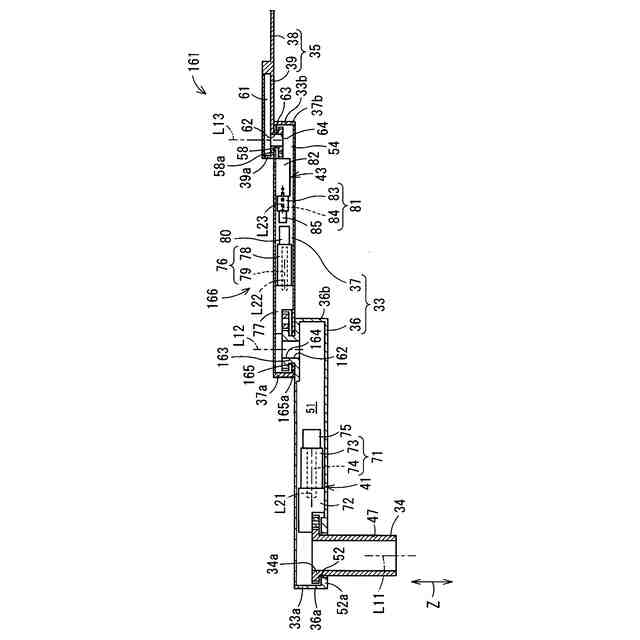
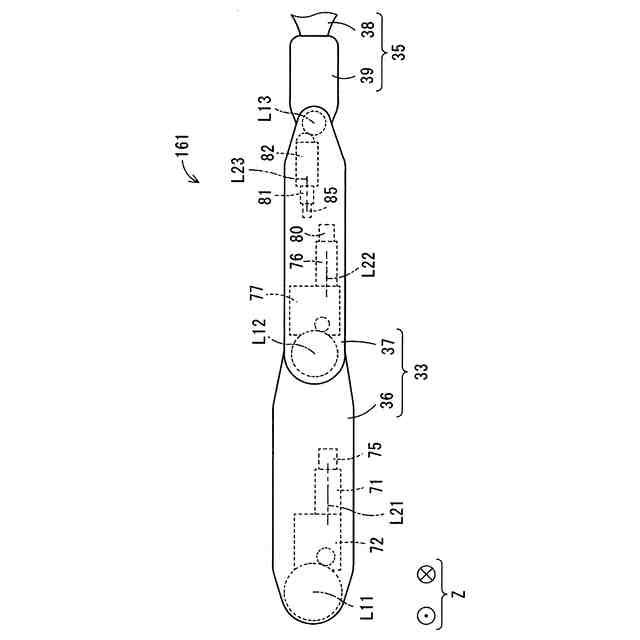
延在して形成される中空状の複数のアーム部を有し、各アーム部は一連に連結され、一端のアーム部は基台に連結され、他端のアーム部はロボットハンドに連結され、互い連結される2つのアーム部は互いに相対的に旋回可能に設けられるロボットアームと、
互いに連結される2つのアーム部間の関節毎に設けられ、互いに連結される2つのアーム部を互いに相対的に旋回駆動する旋回駆動手段とを含み、
旋回駆動手段は、
互いに連結される2つのアーム部の一方に固定される固定部と、固定部に対して、前記一方のアーム部の延在方向に略平行な回転軸線まわりに回転する回転部とを有し、前記一方のアーム部の内部空間に収容されるモータと、
前記一方のアーム部の内部空間に収容され、モータと前記互いに連結される2つのアーム部の他方との間に介在し、モータの動力を、モータの回転部から前記他方のアーム部に伝達する動力伝達部とを含むことを特徴とする基板搬送ロボット。
続きを表示(約 860 文字)
【請求項2】
前記一方のアーム部は、基台側のアーム部であることを特徴とする請求項1記載の基板搬送ロボット。
【請求項3】
動力伝達部は、モータの動力を、複数の歯車によって、モータの回転部から前記他方のアーム部に伝達することを特徴とする請求項1または2記載の基板搬送ロボット。
【請求項4】
動力伝達部は、
モータの回転部に、回転部の回転軸線と同軸に固定される第1歯車と、
前記他方のアーム部に、前記一方および他方のアーム部の旋回軸線と同軸に固定される第2歯車と、
第1および第2歯車間に介在する複数の中間歯車と、
前記一方のアーム部に固定され、各中間歯車が、各中間歯車の回転軸線まわりに回転可能な状態で収容される歯車収容箱とを有することを特徴とする請求項3記載の基板搬送ロボット。
【請求項5】
ロボットハンドが前記一端のアーム部に対して相対的に旋回可能に設けられる基板搬送ロボットであって、
ロボットハンドを前記一端のアーム部に対して相対的に旋回駆動する他の旋回駆動手段を含み、
他の旋回駆動手段は、
前記一端のアーム部に設けられる固定部と、固定部に対して、前記一端のアーム部の延在方向に略平行な回転軸線まわりに回転する回転部とを有し、前記一端のアーム部の内部空間に収容される他のモータと、
前記一端のアーム部の内部空間に収容され、他のモータとロボットハンドとの間に介在し、他のモータの動力を、他のモータの回転部からロボットハンドに伝達する他の動力伝達部とを含むことを特徴とする請求項1~4のいずれか1つに記載の基板搬送ロボット。
【請求項6】
基板として半導体ウェハを搬送する基板搬送ロボットであって、
半導体ウェハが収容される容器と半導体ウェハを処理する処置装置との間で、半導体ウェハを搬送することを特徴とする請求項1~5のいずれか1つに記載の基板搬送ロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ウェハなどの基板を搬送するための基板搬送ロボットに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
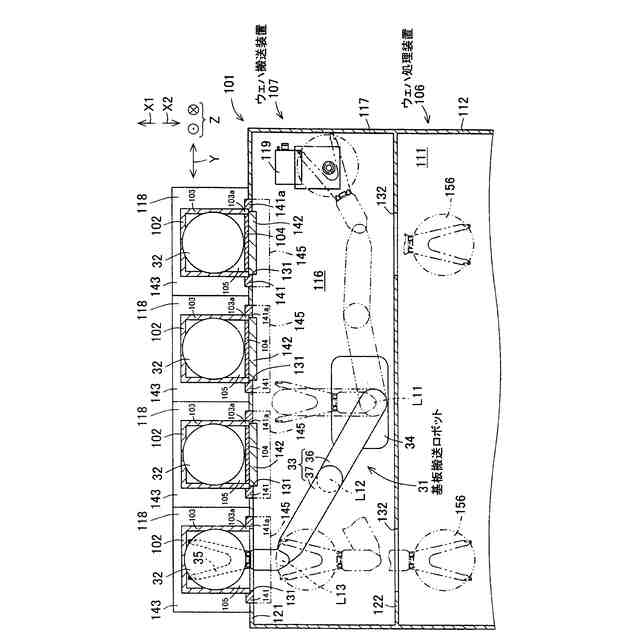
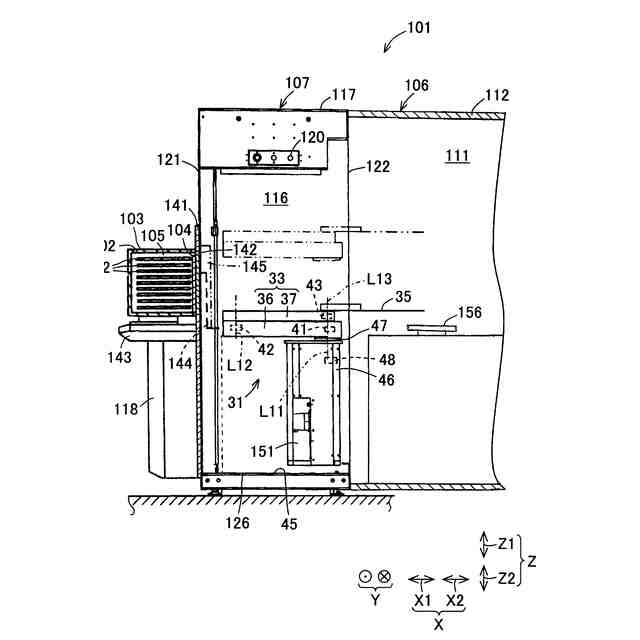
基板処理設備である半導体処理設備は、基板である半導体ウェハ(以下、単に「ウェハ」という)を処理する基板処理装置であるウェハ処理装置と、ウェハを収容する容器であるフープとウェハ処理装置との間でウェハを搬送する基板搬送装置であるウェハ搬送装置とを含む。フープには、処理前または処理後のウェハが収容される。ウェハに対する処理としては、熱処理、不純物導入処理、薄膜形成処理、リソグラフィー処理、洗浄処理および平坦化処理などのプロセス処理が想定される。
【0003】
ウェハ搬送装置は、準備空間が形成される準備空間形成部と、フープオープナと、基板搬送ロボットとを含む。準備空間は、清浄度の高い雰囲気気体で満たされる。フープオープナは、フープおよび準備空間形成部に設けられる各ドアを開閉する。基板搬送ロボットは、準備空間に配置され、フープとウェハ処理装置とにわたってウェハを搬送する。
【0004】
図13は、第1の従来技術である基板搬送ロボット1の構成を簡略化して示す図である。この従来技術に類似する技術は、特許文献1に開示される。基板搬送ロボット1は、スカラ形の水平多関節ロボットによって実現される。基板搬送ロボット1は、ロボットアーム2と、ロボットアーム2の基端部が連結される基台3と、ロボットアーム2の先端部が連結され、ウェハを把持するロボットハンド4とを含む。ロボットアーム2は、第1および第2アーム部5,6を有する。
【0005】
基台3には、第1アーム部5が第1旋回軸線L1まわりに旋回可能に設けられ、第1アーム部5には、第2アーム部6が第2旋回軸線L2まわりに旋回可能に設けられ、第2アーム部6には、ロボットハンド4が第3旋回軸線L3まわりに旋回可能に設けられる。第2アーム部6は、第1モータ7によって旋回駆動される。第1アーム部5およびロボットハンド4は、第2モータ8によって旋回駆動される。第1および第2モータ7,8は、基台3に設けられる。
【0006】
第2アーム部6と第1モータ7との間には、ベルト9などを有する動力伝達部10が介在し、動力伝達部10を介して、第1モータ7の動力がロボットハンド4に伝達され、これによって第2アーム部6が旋回駆動される。またロボットハンド4と第2モータ8との間には、他のベルト11などを有する他の動力伝達部12が介在し、他の動力伝達部12を介して、第2モータ8の動力がロボットハンド4に伝達され、これによってロボットハンド4が旋回駆動される。ベルト9および他のベルト11に代えて、多数の歯車が用いられる場合もある。
【0007】
このような基板搬送ロボット1では、第1および第2アーム部5,6間の関節から第1モータ7までの距離が長くなり、したがって動力伝達部10の部品点数が多くなり、動力伝達部10における誤差の累積が大きくなる。これによってロボットアーム2の先端部の位置決め精度が低下し、ひいてはロボットハンド4の位置決め精度が低下するという問題が生じる。また第2アーム部6およびロボットハンド4間の関節から第2モータ8までの距離が長くなり、したがって他の動力伝達部12の部品点数が多くなり、他の動力伝達部12における誤差の累積が大きくなる。これによってロボットハンド4の姿勢の精度が低下するという問題が生じる。
【0008】
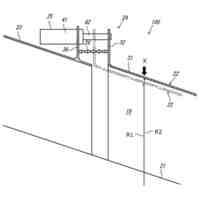
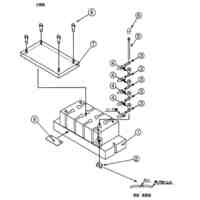
図14は、第2の従来技術である基板搬送ロボット16の構成を簡略化して示す図である。この基板搬送ロボット16は、前述の基板搬送ロボット1に類似するので、対応する部分には同一の符号を付し、異なる点についてだけ説明する。
【0009】
第1アーム部5は、第1モータ17によって旋回駆動される。第1モータ17は、基台3に設けられる。第2アーム部6は、第2モータ18によって旋回駆動される。第2モータ18は、第1アーム部5に設けられる。ロボットハンド4は、第3モータ19によって旋回駆動される。第3モータ19は、第2アーム部6に設けられる。
【0010】
第1モータ17は、基台3に固定される固定部と、固定部に対して、第1旋回軸線L1に平行な回転軸線L5まわりに回転する回転部とを有する。第1アーム部5と第1モータ17との間には、減速ユニットとなる第1動力伝達部20が介在し、第1動力伝達部20を介して、第1モータ17の動力が、第1アーム部5に伝達され、これによって第1アーム部5が旋回駆動される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
加工機
1日前
川崎重工業株式会社
ロボット
8日前
川崎重工業株式会社
ガスタービンエンジン
1日前
川崎重工業株式会社
ガスタービンエンジンの軸受構造
1日前
川崎重工業株式会社
液化ガスの荷役方法および荷役装置
1日前
川崎重工業株式会社
塗装ロボットシステムおよびロボット
8日前
川崎重工業株式会社
エネルギーマネジメントシステム及び方法
2日前
川崎重工業株式会社
発電機及びこれを備えるガスタービンエンジン
1日前
川崎重工業株式会社
情報処理方法、情報処理装置、及びプログラム
3日前
川崎重工業株式会社
溶接器具の冷却システムおよびロボットシステム
9日前
川崎重工業株式会社
溶接器具の冷却システムおよびロボットシステム
9日前
川崎重工業株式会社
始動システムの制御器および始動システムの制御方法
8日前
川崎重工業株式会社
始動システムの制御器および始動システムの制御方法
8日前
川崎重工業株式会社
発電システムの制御器および発電システムの制御方法
8日前
川崎重工業株式会社
ロボット用吸着ハンド、ロボットおよび廃棄物処理システム
9日前
川崎重工業株式会社
加工機および加工方法
1日前
個人
電波吸収体
10日前
東レ株式会社
二次電池
1日前
個人
タワー式増設端子台
23日前
愛知電機株式会社
変圧器
8日前
電建株式会社
端子金具
15日前
SMK株式会社
コネクタ
15日前
株式会社カネカ
接着加工装置
10日前
三菱電機株式会社
端子カバー
1日前
三菱電機株式会社
回路遮断器
15日前
株式会社水素パワー
接続構造
10日前
太陽誘電株式会社
全固体電池
10日前
富士電機株式会社
半導体装置
15日前
株式会社カネカ
接着加工装置
10日前
桑野工業株式会社
同軸プラグ
28日前
日本特殊陶業株式会社
保持装置
15日前
三菱電機株式会社
アンテナ装置
29日前
TDK株式会社
電子部品
22日前
トヨタ自動車株式会社
二次電池
15日前
個人
電波散乱方向制御板
1日前
日機装株式会社
半導体発光装置
8日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ