TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024168941
公報種別
公開特許公報(A)
公開日
2024-12-05
出願番号
2023086016
出願日
2023-05-25
発明の名称
ピッキングシステムおよびピッキング制御方法
出願人
株式会社日立製作所
代理人
弁理士法人信友国際特許事務所
主分類
B65G
1/137 20060101AFI20241128BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】ロボットによるワークのピッキングが失敗した場合の対処が適切に行えるようにする。
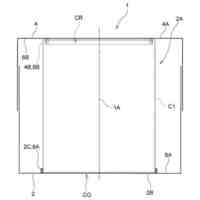
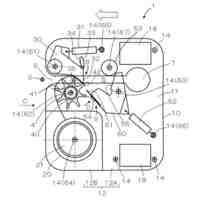
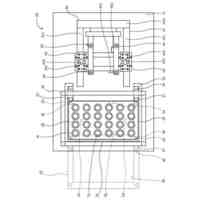
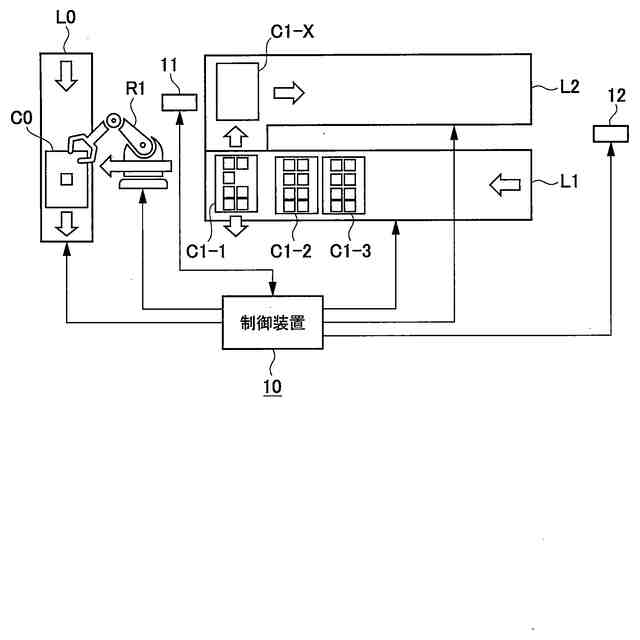
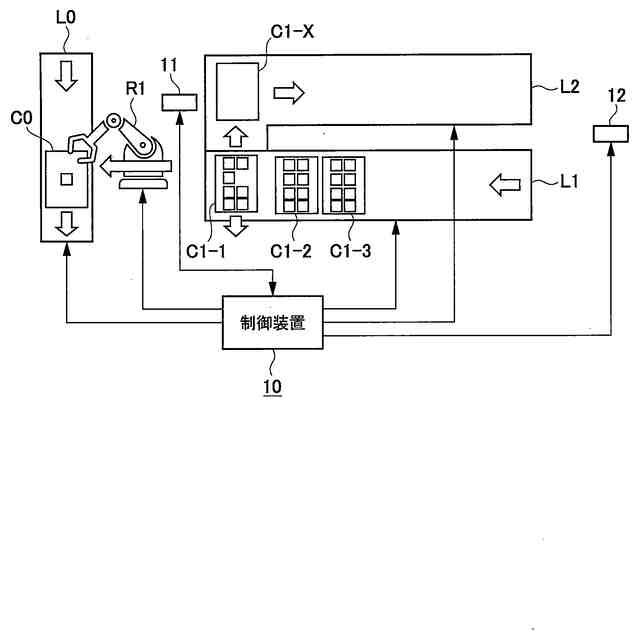
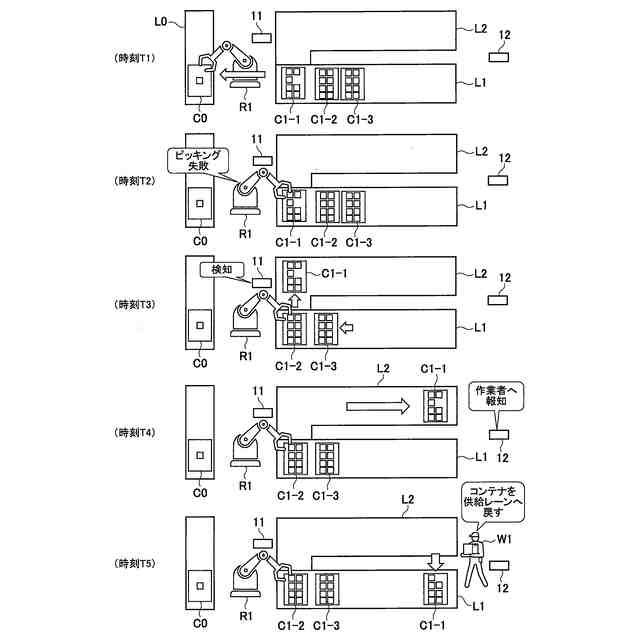
【解決手段】ピッキング対象のワークをロボットR1の配置箇所まで供給し、供給されたワークをロボットR1によりピッキングして、出荷コンテナにプレースするシステムである。ロボットR1の動作範囲までワークが入った供給コンテナを搬送する供給レーンL1と、ロボットがワークをピッキングした後に、供給コンテナC1を排除するコンテナ排除レーンL2と、コンテナ排除レーンL2が排除した供給コンテナC1の内部にワークが残っているかを検知する残ワーク検知部と、残ワーク検知部でワークが残っていることを検知した際に報知する作業指示部と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
ピッキング対象のワークをロボットの配置箇所まで供給し、供給されたワークを前記ロボットによりピッキングして、出荷コンテナにプレースするピッキングシステムであり、
前記ロボットの動作範囲までワークが入った供給コンテナを搬送する供給レーンと、
前記ロボットがワークをピッキングした後に、前記供給コンテナを排除するコンテナ排除レーンと、
前記コンテナ排除レーンが排除した供給コンテナの内部にワークが残っているかを検知する残ワーク検知部と、
前記残ワーク検知部でワークが残っていることを検知した際に報知する作業指示部と、を備える
ピッキングシステム。
続きを表示(約 800 文字)
【請求項2】
前記供給レーンと前記コンテナ排除レーンとを制御する制御装置を備え、
前記制御装置は、前記ロボットがワークのピッキングを行うロボットエリアの直前の前記供給レーンに複数の供給コンテナを滞留させ、前記ロボットによるワークのピッキングの終了で、前記ロボットエリアの供給コンテナを排出し、滞留した出荷コンテナを直ちに前記ロボットエリアに搬送させる
請求項1に記載のピッキングシステム。
【請求項3】
前記制御装置は、前記残ワーク検知部にて前記ロボットのピッキングの失敗を検出した際に、直ちに前記ロボットエリアの供給コンテナを前記コンテナ排除レーンに排除し、新しい供給コンテナを前記ロボットエリアまで供給する
請求項2に記載のピッキングシステム。
【請求項4】
前記残ワーク検知部でワークが残っている供給コンテナを検知した際に、前記作業指示部は、該当する供給コンテナの内部のワークの姿勢変更指示を行う
請求項1に記載のピッキングシステム。
【請求項5】
ピッキング対象のワークをロボットの配置箇所まで供給し、供給された前記ワークを前記ロボットによりピッキングして、出荷コンテナにプレースするピッキングシステムに適用されるピッキング制御方法であり、
前記ピッキングシステムは、前記ロボットの動作範囲までワークが入った供給コンテナを搬送する供給レーンと、
前記ロボットが前記ワークをピッキングした後に、前記供給コンテナを排除するコンテナ排除レーンと、を有し、
前記コンテナ排除レーンが排除した供給コンテナの内部にワークが残っているかを検知する残ワーク検知処理と、
前記残ワーク検知処理でワークが残っていることを検知した際に報知する作業指示処理と、を含む
ピッキング制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ピッキングシステムおよびピッキング制御方法に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
近年、人手不足や人件費の高騰により、物流倉庫での出荷時の搬送作業をロボットで自動化することが行われている。例えば出荷対象物であるワークを物流倉庫の在庫から必要量ピックして、出荷コンテナに入れるピッキング作業を、ピッキングロボットにより自動化することが進められている。
【0003】
ところで、ロボットによるワークのピッキング作業は、ワークの形状などが原因となって失敗する可能性がある。すなわち、液体が封入された洗剤などの袋や、形状が複雑なスプレーボトルのような物品は、ロボットアームで正しく掴むことが困難であり、ピッキングに失敗することが多々ある。また、掴みやすい形状のワークであっても、コンテナ内に多数のワークが入れられたことで、ロボットアームが掴む箇所がないために、ピッキングに失敗することある。
【0004】
特許文献1には、ロボットによるピッキング作業を行う場合に、制御装置にピッキングの結果を送信して、制御装置がピッキングの失敗を判断することができる技術が記載されている。
【先行技術文献】
【特許文献】
【0005】
特開2023-24559号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上述したようにロボットによるワークのピッキングは失敗する可能性があるが、失敗時には、出荷レーンにおける搬送などを一時的に停止させて、手作業でワークを出荷コンテナに入れるなどの作業を行う必要がある。したがって、ロボットによるワークのピッキングに失敗するごとに、ロボットによるピッキング作業が中断して、ロスタイムが生じてしまうという問題が発生する。
【0007】
本発明は、かかる点に鑑み、ロボットによるワークのピッキングが失敗した場合の対処を適切に行うことができるピッキングシステムおよびピッキング制御方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記課題を解決するために、例えば請求の範囲に記載の構成を採用する。
本願は、上記課題を解決する手段を複数含んでいるが、その一例を挙げるならば、ピッキングシステムとして、ピッキング対象のワークをロボットの配置箇所まで供給し、供給されたワークをロボットによりピッキングして、出荷コンテナにプレースするものに適用される。
そして、ピッキングシステムは、ロボットの動作範囲までワークが入った供給コンテナを搬送する供給レーンと、ロボットがワークをピッキングした後に、供給コンテナを排除するコンテナ排除レーンと、コンテナ排除レーンが排除した供給コンテナの内部にワークが残っているかを検知する残ワーク検知部と、残ワーク検知部でワークが残っていることを検知した際に報知する作業指示部と、を備える。
ピッキングシステム。
【発明の効果】
【0009】
本発明によれば、ロボットでのピッキングが失敗したとき、該当する供給コンテナが排除レーンに排除されると共に、直ちに作業者に報知されて、他のピッキング作業を停止させることなく、失敗したワークの対処が可能になる。
上記した以外の課題、構成および効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
【0010】
本発明の第1の実施の形態例に係るピッキングシステムの例を示す構成図である。
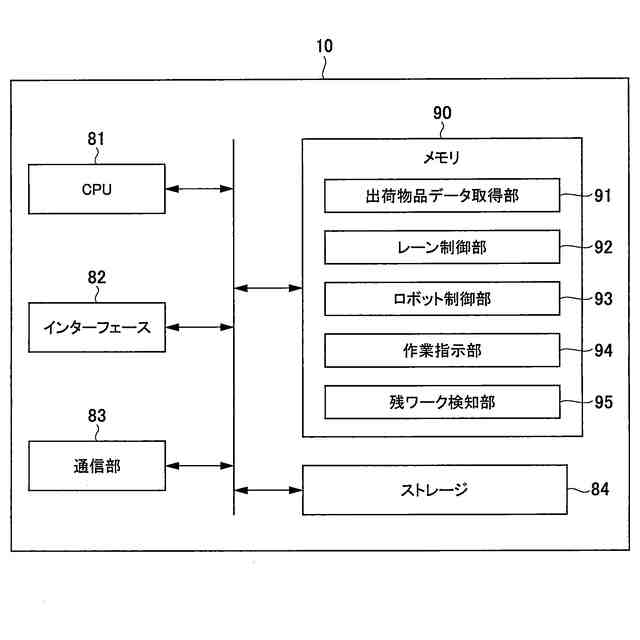
本発明の第1の実施の形態例に係るピッキングシステムの制御装置の構成例を示すブロック図である。
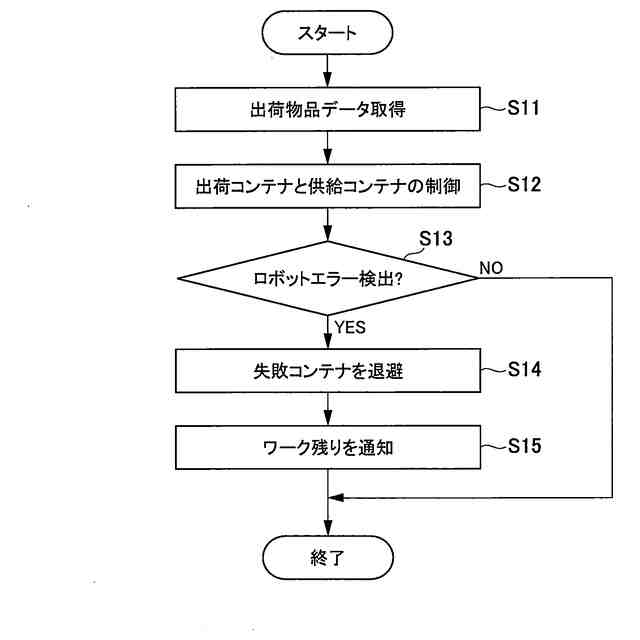
本発明の第1の実施の形態例に係るピッキングシステムの搬送制御処理の例を示すフローチャートである。
本発明の第1の実施の形態例に係るピッキングシステムの時刻ごとの処理動作の例を示す図である。
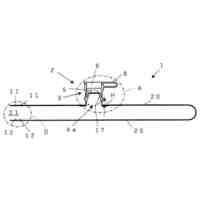
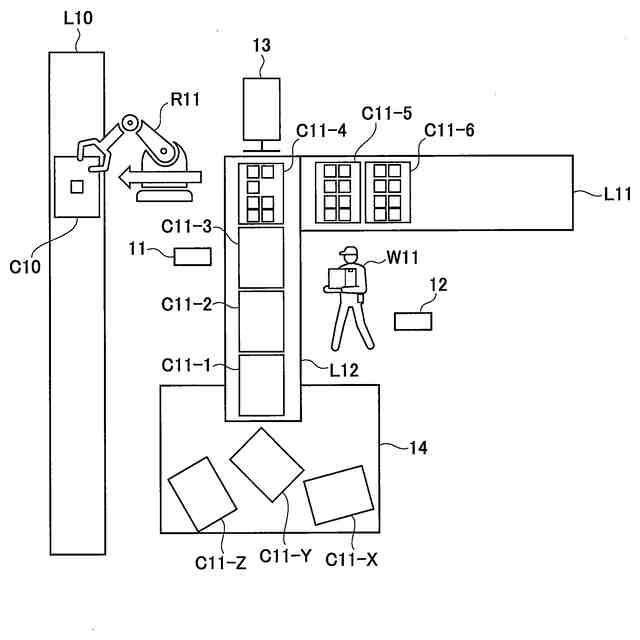
本発明の第2の実施の形態例に係るピッキングシステムの例を示す構成図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
箱
4か月前
個人
包装体
5か月前
個人
ゴミ箱
4か月前
個人
容器
1か月前
個人
物品収納具
8か月前
個人
土嚢運搬器具
19日前
個人
パウチ補助具
4か月前
個人
折り畳み水槽
5か月前
個人
ダンボール宝箱
5か月前
個人
コード類収納具
11日前
個人
閉塞装置
2か月前
個人
圧縮収納袋
5か月前
株式会社和気
包装用箱
1か月前
個人
ゴミ処理機
1か月前
株式会社イシダ
包装装置
4か月前
個人
粘着テープ切断装置
7か月前
個人
粘着テープ剥がし具
6か月前
三甲株式会社
容器
7か月前
株式会社イシダ
箱詰装置
7か月前
個人
塗料容器用蓋
5か月前
三甲株式会社
容器
7か月前
三甲株式会社
蓋体
1日前
株式会社新弘
容器
4か月前
株式会社新弘
容器
4か月前
三甲株式会社
蓋体
1か月前
個人
包装箱
2か月前
積水樹脂株式会社
接着剤
4か月前
日東精工株式会社
供給装置
1か月前
個人
水切りネットの保持具
1か月前
三菱製紙株式会社
包装用紙
6か月前
個人
ゴミ箱用ゴミ袋保持具
4か月前
株式会社シプソル
梱包装置
2か月前
個人
蓋付結束バンド
6か月前
株式会社デュプロ
包装装置
4か月前
日東精工株式会社
検査装置
8か月前
三甲株式会社
パレット
4か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ