TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024168843
公報種別
公開特許公報(A)
公開日
2024-12-05
出願番号
2023085845
出願日
2023-05-25
発明の名称
移動体の検査方法
出願人
トヨタ自動車株式会社
代理人
弁理士法人明成国際特許事務所
主分類
G01M
17/007 20060101AFI20241128BHJP(測定;試験)
要約
【課題】遠隔制御によって移動可能な移動体の検査において、検査結果が異常となる要因を特定できる技術を提供する。
【解決手段】遠隔制御によって移動可能な移動体の検査方法は、遠隔制御装置から検査対象の移動体に対して、移動体の移動に関する出力値が予め定められた目標値となるように駆動させる指示を与える第一工程と、移動体を検査する検査装置を用いて出力値を測定し、測定値を取得する第二工程と、目標値と測定値との差があらかじめ定められた第一範囲以内ではない場合に、検査対象とは異なる正常な移動体であって出力値が正常な移動体について、第一工程および第二工程を実行する補助検査工程と、補助検査工程において、正常な移動体における目標値と測定値との差が予め定められた第二範囲外である場合に、遠隔制御装置に異常がある旨の出力を行う第三工程と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
遠隔制御によって移動可能な移動体の検査方法であって、
遠隔制御装置から検査対象の移動体に対して、前記移動体の移動に関する出力値が予め定められた目標値となるように駆動させる指示を与える第一工程と、
前記移動体を検査する検査装置を用いて前記出力値を測定し、測定値を取得する第二工程と、
前記目標値と前記測定値との差があらかじめ定められた第一範囲以内ではない場合に、前記検査対象とは異なる正常な移動体であって、前記出力値が正常な移動体について、前記第一工程および前記第二工程を実行する補助検査工程と、
前記補助検査工程において、前記正常な移動体における前記目標値と前記測定値との差が予め定められた第二範囲外である場合に、前記遠隔制御装置に異常がある旨の出力を行う第三工程と、を備える、
検査方法。
続きを表示(約 1,000 文字)
【請求項2】
請求項1に記載の検査方法であって、
前記補助検査工程において、前記正常な移動体における前記目標値と前記測定値との差が前記第二範囲以内である場合に、さらに、前記検査対象および前記正常な移動体とは異なる複数の移動体について、前記第一工程および前記第二工程を実行する後続検査工程と、
前記後続検査工程において、前記複数の移動体のうちすべての移動体における前記目標値と前記測定値との差が予め定められた第三範囲以内である場合に、前記検査対象に異常がある旨の出力を行う第四工程と、を備える、
検査方法。
【請求項3】
前記正常な移動体とは、手動操作によって移動させた状態における前記検査装置の検査により異常なしと判定された移動体と、前記検査装置とは異なる検査装置により前記第一工程および前記第二工程を実行して異常なしと判定された移動体とのうち少なくともいずれかの移動体である、請求項1に記載の検査方法。
【請求項4】
前記遠隔制御装置に異常がある旨の出力が行われた場合に、前記遠隔制御装置の異常を前記遠隔制御装置の管理者に報知する、請求項1に記載の検査方法。
【請求項5】
遠隔制御によって移動と移動の停止とが可能な移動体の検査方法であって、
遠隔制御装置から検査対象の移動体に対して、前記移動体の停止部による制動力が予め定められた目標値となるように動作させて前記移動体の移動動作を停止させる指示を与える停止指示工程と、
前記移動体を検査する検査装置を用いて、前記移動体に前記移動動作をさせるための外力を段階的に上げながら前記検査対象に付与し、前記停止部によって前記移動動作が停止された状態から移動動作する状態へと切り替わるタイミングの前記外力を取得する外力取得工程と、
前記タイミングで取得された前記外力と前記目標値に対応する外力との差が予め定められた目標外力範囲以内ではない場合に、前記検査対象とは異なる正常な移動体であって、前記制動力が正常な移動体について、前記停止指示工程および前記外力取得工程を実行する補助検査工程と、
前記補助検査工程において、前記正常な移動体における前記タイミングで取得された前記外力と前記目標値に対応する外力との差があらかじめ定められた補助目標外力範囲外である場合に、前記遠隔制御装置に異常がある旨の出力を行う異常出力工程と、を備える、
検査方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、移動体の検査方法に関する。
続きを表示(約 3,500 文字)
【背景技術】
【0002】
例えば、特許文献1には、作業者が車両をローラ装置上で走行させて、車両の車速センサによって取得されるセンサ車速と、ローラ装置によって取得されるローラ車速とを用いて、車両のスピードメータの異常を検査する検査システムが開示されている。この検査システムでは、ローラ車速が予め定められた基準範囲以内でない場合には、車両のスピードメータの異常と判定する。
【先行技術文献】
【特許文献】
【0003】
特開2020-60459号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、検査装置を用いて異常を検出した場合であっても、必ずしも車両の異常であるとは限らず、例えば、検査装置の異常である可能性もある。また、遠隔制御によって車両を走行させた状態で検査を行う場合では、遠隔制御を実行する遠隔制御装置の異常である可能性もある。従来の技術では、異常が発生した場合に、異常の要因が車両と、検査装置と、遠隔制御装置とのいずれであるのかを特定することができないといった問題がある。
【課題を解決するための手段】
【0005】
本開示は、以下の形態として実現することが可能である。
【0006】
(1)本開示の一形態によれば、遠隔制御によって移動可能な移動体の検査方法が提供される。この検査方法は、遠隔制御装置から検査対象の移動体に対して、前記移動体の移動に関する出力値が予め定められた目標値となるように駆動させる指示を与える第一工程と、前記移動体を検査する検査装置を用いて前記出力値を測定し、測定値を取得する第二工程と、前記目標値と前記測定値との差があらかじめ定められた第一範囲以内ではない場合に、前記検査対象とは異なる正常な移動体であって、前記出力値が正常な移動体について、前記第一工程および前記第二工程を実行する補助検査工程と、前記補助検査工程において、前記正常な移動体における前記目標値と前記測定値との差が予め定められた第二範囲外である場合に、前記遠隔制御装置に異常がある旨の出力を行う第三工程と、を備える。
この形態の検査方法によれば、遠隔制御によって移動可能な移動体の移動に関する検査において、補助検査を実行することにより、異常の要因が、検査対象と、検査装置と、遠隔制御装置とのうち遠隔制御装置であることを特定することができる。
(2)上記形態の検査方法において、前記補助検査工程において、前記正常な移動体における前記目標値と前記測定値との差が前記第二範囲以内である場合に、さらに、前記検査対象および前記正常な移動体とは異なる複数の移動体について、前記第一工程および前記第二工程を実行する後続検査工程と、前記後続検査工程において、前記複数の移動体のうちすべての移動体における前記目標値と前記測定値との差が予め定められた第三範囲以内である場合に、前記検査対象に異常がある旨の出力を行う第四工程と、を備えてよい。
この形態の検査方法によれば、遠隔制御によって移動可能な移動体の検査において、後続検査を実行することにより、異常の要因が、検査対象と検査装置とのうち検査対象であることを特定することができる。
(3)上記形態の検査方法において、前記正常な移動体とは、手動操作によって移動させた状態における前記検査装置の検査により異常なしと判定された移動体と、前記検査装置とは異なる検査装置により前記第一工程および前記第二工程を実行して異常なしと判定された移動体とのうち少なくともいずれかの移動体であってよい。
この形態の検査方法によれば、正常な車両を簡易な方法により準備することができる。
(4)上記形態の検査方法において、前記遠隔制御装置に異常がある旨の出力が行われた場合に、前記遠隔制御装置の異常を前記遠隔制御装置の管理者に報知してもよい。
この形態の検査方法によれば、異常の要因の特定結果を報知することにより、遠隔制御装置を早期に修理させることができる。
(5)本開示の他の形態によれば、遠隔制御によって移動と移動の停止とが可能な移動体の検査方法が提供される。この検査方法は、遠隔制御装置から検査対象の移動体に対して、前記移動体の停止部による制動力が予め定められた目標値となるように動作させて前記移動体の移動動作を停止させる指示を与える停止指示工程と、前記移動体を検査する検査装置を用いて、前記移動体に前記移動動作をさせるための外力を段階的に上げながら前記検査対象に付与し、前記停止部によって前記移動動作が停止された状態から移動動作する状態へと切り替わるタイミングの前記外力を取得する外力取得工程と、前記タイミングで取得された前記外力と前記目標値に対応する外力との差が予め定められた目標外力範囲以内ではない場合に、前記検査対象とは異なる正常な移動体であって、前記制動力が正常な移動体について、前記停止指示工程および前記外力取得工程を実行する補助検査工程と、前記補助検査工程において、前記正常な移動体における前記タイミングで取得された前記外力と前記目標値に対応する外力との差があらかじめ定められた補助目標外力範囲外である場合に、前記遠隔制御装置に異常がある旨の出力を行う異常出力工程と、を備える。
この形態の検査方法によれば、遠隔制御によって移動可能な移動体の停止部に関する検査において、補助検査を実行することにより、異常の要因が、検査対象と、検査装置と、遠隔制御装置とのうち遠隔制御装置であることを特定することができる。
本開示は、検査方法以外の種々の形態で実現することも可能である。例えば、移動体の検査システム、検査装置、移動体の製造方法、検査システムの制御方法、検査装置の制御方法、その制御方法を実現するコンピュータプログラム、そのコンピュータプログラムを記録した一時的でない記録媒体等の形態で実現することができる。
【図面の簡単な説明】
【0007】
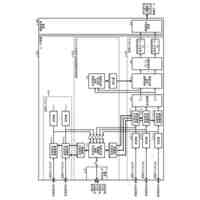
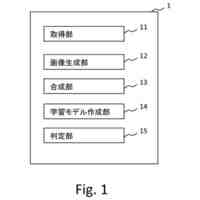
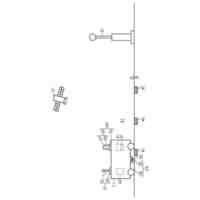
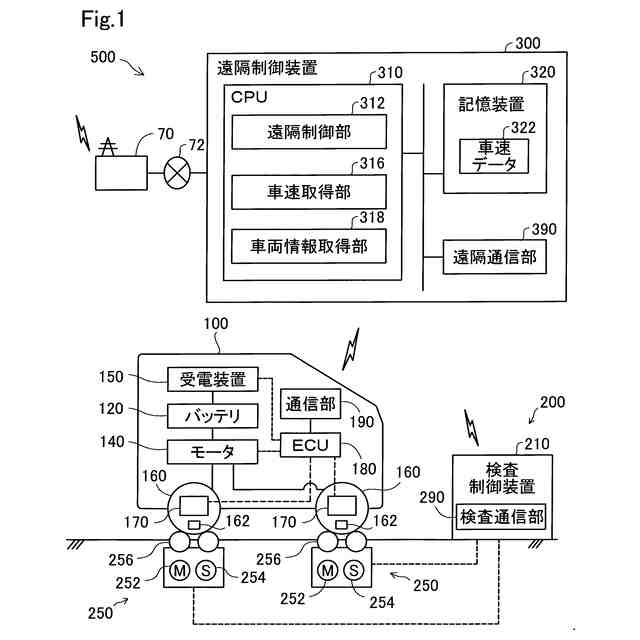
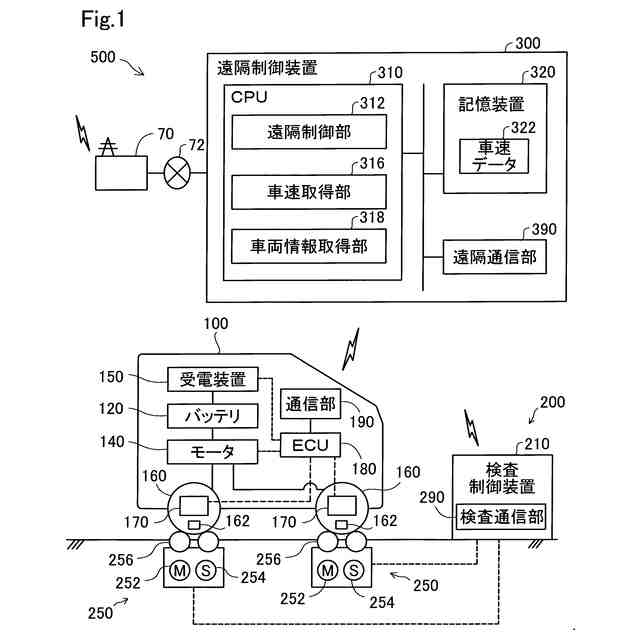
第1実施形態としての検査システムの概略構成を示す説明図。
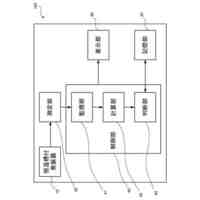
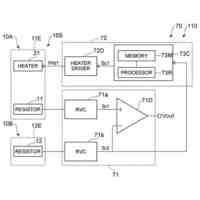
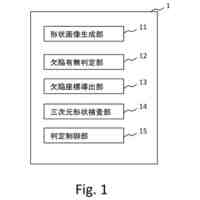
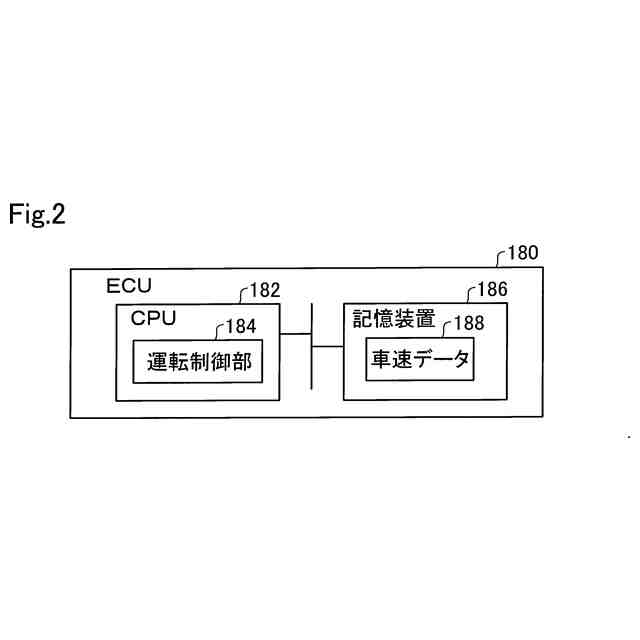
ECUの内部機能構成を示すブロック図。
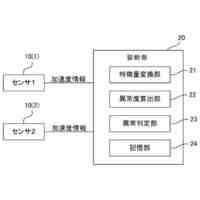
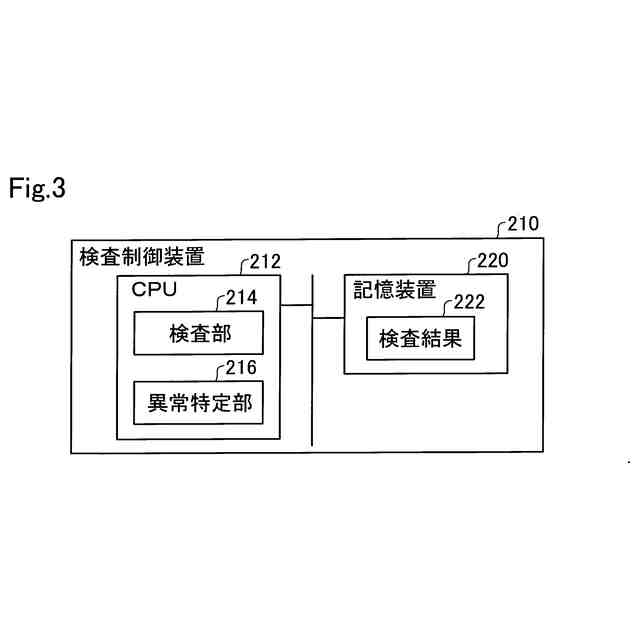
検査制御装置の内部機能構成を示すブロック図。
第1実施形態に係る検査方法の処理ルーチンを示すフローチャート。
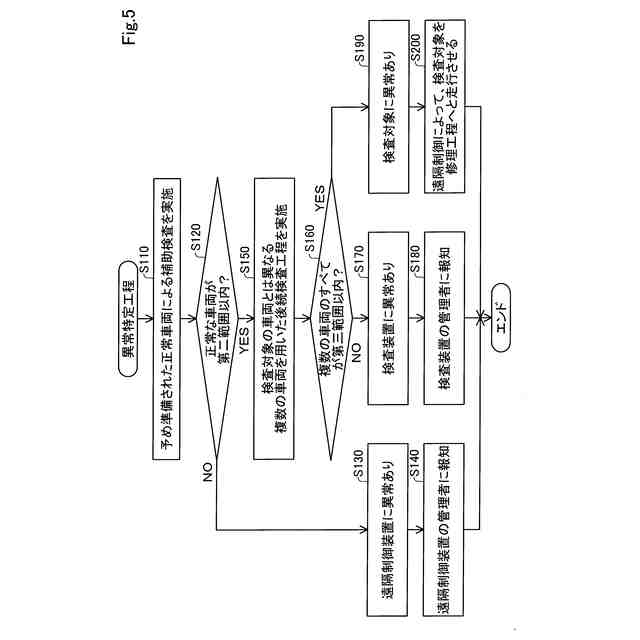
異常特定工程の処理ルーチンを示すフローチャート。
第2実施形態に係る検査方法の処理ルーチンを示すフローチャート。
第2実施形態に係る検査方法における異常特定工程の処理ルーチンを示すフローチャート。
【発明を実施するための形態】
【0008】
A.第1実施形態:
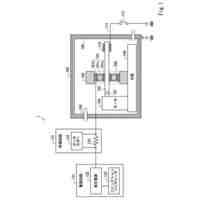
図1は、本開示の第1実施形態としての検査システム500の概略構成を示す説明図である。検査システム500は、例えば、遠隔制御によって走行可能な車両100を製造する工場で用いられる。検査システム500は、検査装置200と、遠隔制御装置300とを備えている。検査システム500は、遠隔制御によって車両100が所定の走行速度で正常に走行できるか否かを検査する。
【0009】
車両100とは、例えば、乗用車、トラック、バス、ならびに工事用車両などである。車両100は、電気自動車(BEV:Battery Electric Vehicle)であることが好ましい。なお、車両100は、電気自動車に限られず、例えば、ガソリン自動車や、ハイブリッド自動車や、燃料電池自動車でもよい。車両100は、車両通信部190と、受電装置150と、モータ140と、バッテリ120と、車輪速センサ170と、ECU(Electronic Control Unit)180とを備えている。
【0010】
車両通信部190は、工場内のアクセスポイント70を介して、検査装置200や遠隔制御装置300など、ネットワーク72に接続された車両100の外部の装置との無線通信を行う。車両通信部190は、車両100の走行速度、ブレーキの制動力、車輪160の回転数、ならびにバッテリ120の充電率(SOC:State Of Charge)など、検査装置200の検査項目に対応する出力値を、遠隔制御装置300あるいは検査装置200に送信する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
積算巻尺
22日前
個人
水準器
7日前
丸一株式会社
試験用継手
20日前
個人
電波反射強度向上方法
21日前
株式会社大真空
センサ
今日
個人
シート形状体温計
3日前
大和製衡株式会社
組合せ秤
21日前
アズビル株式会社
圧力センサ
20日前
株式会社チノー
液浸プローブ
2日前
三菱電機株式会社
レーダ装置
27日前
日本電波工業株式会社
風速測定装置
今日
株式会社東芝
センサ
14日前
トヨタ自動車株式会社
評価装置
27日前
株式会社東芝
センサ
7日前
トヨタ自動車株式会社
解析装置
今日
キヤノン電子株式会社
サーボ加速度計
28日前
キヤノン電子株式会社
サーボ加速度計
28日前
キヤノン電子株式会社
サーボ加速度計
14日前
キヤノン電子株式会社
サーボ加速度計
14日前
株式会社豊田自動織機
車両
2日前
株式会社島津製作所
液体注入装置
14日前
大和製衡株式会社
搬送装置
14日前
能美防災株式会社
構造物劣化診断システム
14日前
ミツミ電機株式会社
入力装置
14日前
トヨタ自動車株式会社
電池検査装置
9日前
ミツミ電機株式会社
入力装置
15日前
株式会社リコー
測距システム
15日前
個人
コンベックスルール用の計測補助用具
今日
ニチコン株式会社
コンデンサ
21日前
株式会社不二越
X線測定装置
21日前
株式会社ピーエムティー
検査ゲージ
今日
富士電機株式会社
エンコーダ
21日前
個人
純金を作用電極に用いたORP測定装置
28日前
個人
道または交差点を表現するアルゴリズム
16日前
株式会社山城建設
鉄筋用ロッド支持具
21日前
住友理工株式会社
センサユニット
8日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ