TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024168177
公報種別
公開特許公報(A)
公開日
2024-12-05
出願番号
2023084626
出願日
2023-05-23
発明の名称
車両の制御装置
出願人
スズキ株式会社
代理人
弁理士法人東京国際特許事務所
主分類
B62D
6/00 20060101AFI20241128BHJP(鉄道以外の路面車両)
要約
【課題】外乱が中点学習に及ぼす影響を抑制しながら、車両バランスの変更に対しては速やかに学習を実行し、操舵フィーリングを向上させる。
【解決手段】
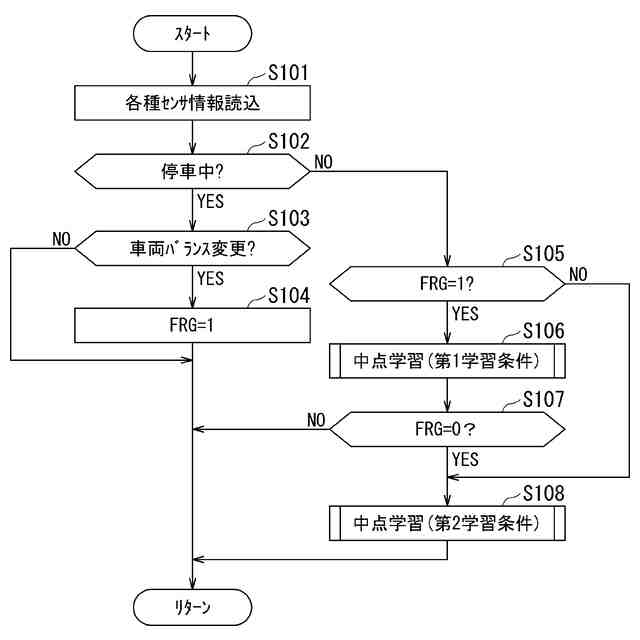
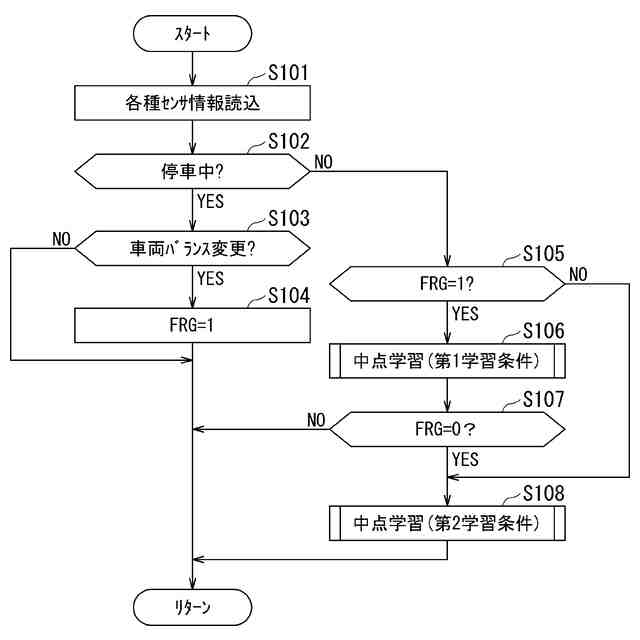
舵角の中点位置θctrを学習する中点学習を実行する中点位置学習手段と、車両バランスの変更を検知する車両バランス変更検知手段と、を備える。車両バランスの変更を検知した場合は(S103)、車両バランスの変更に対する中点学習(第1中点学習)を、その検知前における中点学習(第2中点学習)よりも高い学習速度で実行する(S106)。
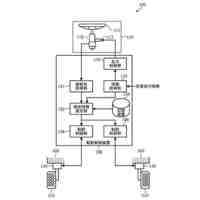
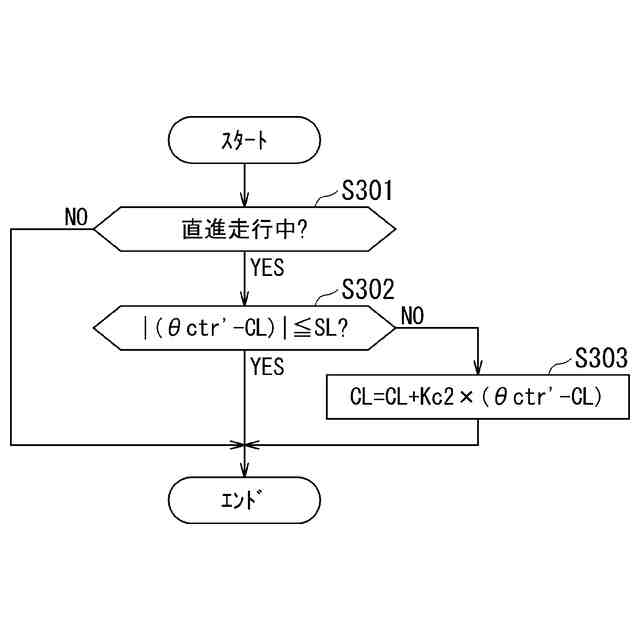
【選択図】 図3
特許請求の範囲
【請求項1】
舵角の中点位置を学習する中点学習を実行する中点位置学習手段と、
車両バランスの変更を検知する車両バランス変更検知手段と、を備え、
前記中点位置学習手段は、前記車両バランス変更検知手段により前記車両バランスの変更を検知した場合に、前記車両バランスの変更に対する前記中点学習を、その検知前における前記中点学習よりも高い学習速度で実行する、車両の制御装置。
続きを表示(約 1,000 文字)
【請求項2】
前記中点位置学習手段は、前記車両バランスの変更に対する前記中点学習において、一学習当たりの学習値の変化量を増大させるか、学習の頻度を増大させる、請求項1に記載の車両の制御装置。
【請求項3】
前記車両バランス変更検知手段は、前記車両バランスの変更として、前記車両の重量バランスの変更を検知する、請求項1に記載の車両の制御装置。
【請求項4】
前記車両の走行状態に相関する状態パラメータが所定の範囲にある場合に、前記車両が直進走行中であると判定する直進走行判定手段をさらに備え、
前記中点位置学習手段は、前記直進走行判定手段により前記車両が直進走行中であると判定したことを条件に前記中点学習を実行し、
前記直進走行判定手段は、前記車両バランス変更検知手段により前記車両バランスの変更を検知した場合に、前記所定の範囲を検知前よりも拡大させる、請求項1に記載の車両の制御装置。
【請求項5】
前記直進走行判定手段は、前記車両バランスの変更に対する前記中点学習の開始後、前記中点学習における一学習当たりの学習値の変化量が所定の値よりも増大した場合に、前記所定の範囲を前記所定の値への到達前よりも縮小させる、請求項4に記載の車両の制御装置。
【請求項6】
前記中点位置学習手段は、
前記車両バランスに応じた前記中点位置の学習初期値を有し、
前記車両バランスの変更を検知した場合に、変更後の前記車両バランスに応じた前記学習初期値から前記中点学習を開始する、請求項1に記載の車両の制御装置。
【請求項7】
前記車両バランス変更検知手段は、車内に備わる座席のシートベルトの装着状況をもとに、前記中点位置の学習初期値を設定する、請求項6に記載の車両の制御装置。
【請求項8】
前記中点位置学習手段は、
前記車両バランスの変更を検知した場合に、検知前における前記中点学習の最終値から前記中点学習を開始し、
変更後の前記車両バランスが変更前の前記車両バランスに近いときほど、前記中点学習を高い学習速度で実行する、請求項1に記載の車両の制御装置。
【請求項9】
前記車両バランス変更検知手段は、前記車両バランスの変更を前記車両の停車時に検知する、請求項1から8のいずれか一項に記載の車両の制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両の制御装置に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
舵角の中点位置に生じた変化を学習し、中点位置を補正する車両の制御装置が存在する。
【先行技術文献】
【特許文献】
【0003】
特開2014-240234号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
舵角の中点位置は、車両の個体特性の違いや経年変化等によるほか、車両バランスに変更が生じることによっても変化する。
【0005】
車両の重量に関するバランス、つまり、重心位置の変更は、車内における乗員(運転者および同乗者を含む搭乗者)の配置変更を主な要因の一つとする。例えば、運転席および助手席に乗員が存在する場合と運転席およびその後方の後部席に乗員が存在する場合とでは、車両の重量バランスが相違する。その他、重量バランスの変更は、荷物が左右の一方に片寄った状態で積み込まれることなどによっても発生する。
【0006】
車両バランスの変更に対し、その影響を舵角の中点位置に速やかに反映させるには、中点位置に生じた変化を学習し、中点位置を補正する中点学習を実行する際の条件を緩やかに設定し、学習を促す必要がある。
【0007】
しかし、学習の実行条件を中点位置に生じた変化の要因を問わず一律に緩和したとすれば、横風等の外乱による一時的な中点位置の変化に対しても学習が敏感に応答することとなる。これにより、外乱の影響が中点位置に反映されてしまい、操舵フィーリングが却って悪化する事態が懸念される。
【0008】
このような実情に鑑み、本発明は、横風等の外乱が中点学習に及ぼす影響を抑制しながら、車両バランスの変更に対しては速やかに学習を実行し、操舵フィーリングを向上させることのできる車両の制御装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
前記の課題を解決するため、本発明の一形態に係る車両の制御装置は、舵角の中点位置を学習する中点学習を実行する中点位置学習手段と、車両バランスの変更を検知する車両バランス変更検知手段と、を備え、前記中点位置学習手段は、前記車両バランス変更検知手段により前記車両バランスの変更を検知した場合に、前記車両バランスの変更に対する前記中点学習を、その検知前における前記中点学習よりも高い学習速度で実行する。
【発明の効果】
【0010】
本発明の一形態によれば、車両バランスに変更が生じ、その変更を検知した場合に、車両バランスの変更に対する中点学習を実行するとともに、この場合の中点学習を検知前における中点学習よりも高い学習速度で実行する。これにより、車両自体のバランスの変更に対しては速やかに学習を実行して、その影響を舵角の中点位置に積極的に反映させ、操舵フィーリングの向上を図る一方、横風等の外乱については中点位置の学習に及ぼす影響を抑制し、操舵フィーリングが悪化する事態を抑制することが可能となる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
スズキ株式会社
ハイブリッド車両の制御装置
11日前
スズキ株式会社
対価支払いシステム、対価支払い通知装置および対価支払い方法
7日前
個人
カート
7日前
個人
走行装置
21日前
個人
乗り物
2か月前
個人
電動走行車両
21日前
個人
閂式ハンドル錠
21日前
個人
発音装置
4か月前
個人
電動モビリティ
4か月前
個人
自由方向乗車自転車
4か月前
個人
キャンピングトライク
5か月前
個人
ステアリングの操向部材
5か月前
個人
フロントフットブレーキ。
28日前
株式会社豊田自動織機
産業車両
1か月前
豊田鉄工株式会社
小型車両
4日前
学校法人千葉工業大学
車両
6か月前
学校法人千葉工業大学
車両
6か月前
学校法人千葉工業大学
車両
6か月前
個人
ホイールハブ駆動構造
1か月前
株式会社GEAR
電動カート
1か月前
株式会社カインズ
台車
4か月前
トヨタ自動車株式会社
パネル
1か月前
個人
自転車の駐輪場システム
2か月前
個人
走行車両等の粉塵飛散防止装置
21日前
コンビ株式会社
乳母車
3か月前
株式会社クボタ
作業車
3か月前
ヤマハ発動機株式会社
自転車
1か月前
株式会社オカムラ
搬送用什器
4か月前
ダイハツ工業株式会社
車両構造
13日前
豊田合成株式会社
ハンドル装置
1か月前
マルイチエクソム株式会社
台車
3か月前
株式会社ジェイテクト
操舵装置
6か月前
ダイハツ工業株式会社
車両構造
6日前
株式会社宝島社
アシスト自転車
4か月前
株式会社アテックス
自走式乗用草刈機
5か月前
ダイハツ工業株式会社
車両構造
25日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ