TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024166913
公報種別
公開特許公報(A)
公開日
2024-11-29
出願番号
2023083343
出願日
2023-05-19
発明の名称
深度推定装置、キャリブレーション方法、キャリブレーションプログラム
出願人
トヨタ自動車株式会社
代理人
弁理士法人高田・高橋国際特許事務所
主分類
G06T
7/80 20170101AFI20241122BHJP(計算;計数)
要約
【課題】カメラによって撮像される画像における深度を推定する技術に関して、人手による作業や追加の装置を必要とすることなく、高精度な深度の推定を実現することを可能とする技術を提供する。
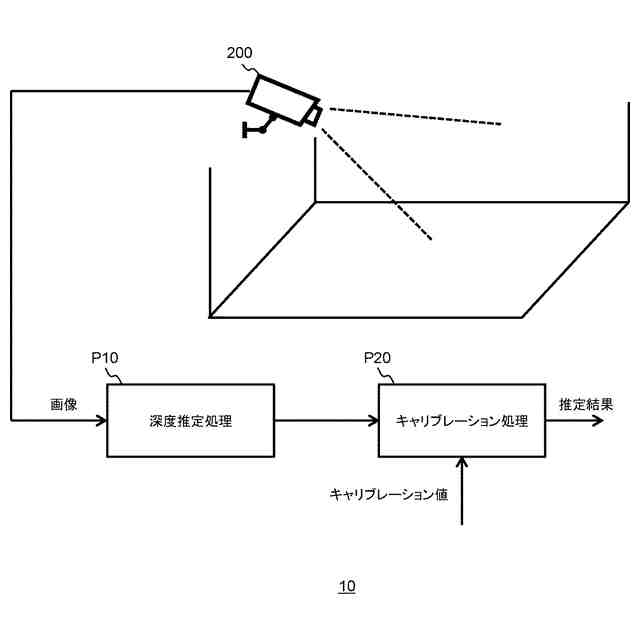
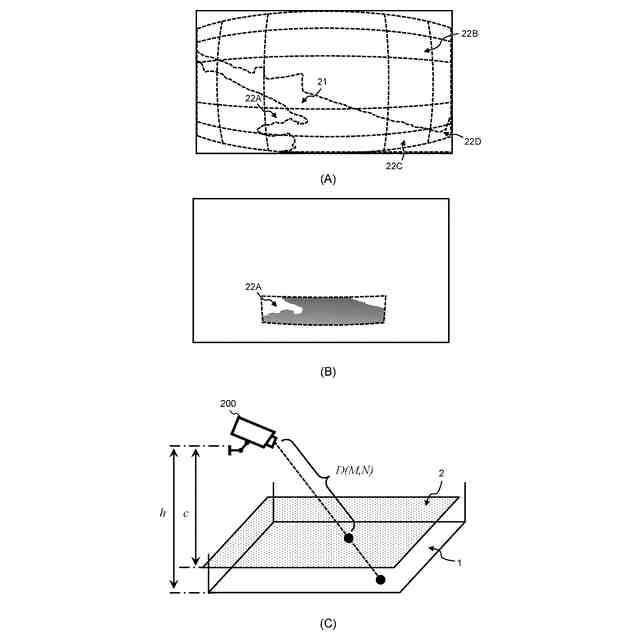
【解決手段】本開示に係る深度推定装置は、画像における深度を推定する処理と、カメラの水平面又は鉛直面に対する設置位置を取得する処理と、画像において水平面又は鉛直面が映る平面領域を特定する処理と、画像に複数の部分領域を設定する処理と、各部分領域に対して、平面領域において推定された深度に基づいて回帰平面を算出する処理と、回帰平面に対するカメラの位置とカメラの水平面又は鉛直面に対する設置位置とを比較することにより各部分領域に対してキャリブレーション値を算出する処理と、各部分領域において、対応するキャリブレーション値に基づいてキャリブレーションを実施する処理と、を実行する。
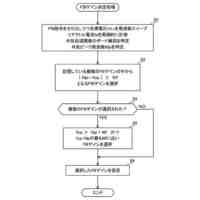
【選択図】図6
特許請求の範囲
【請求項1】
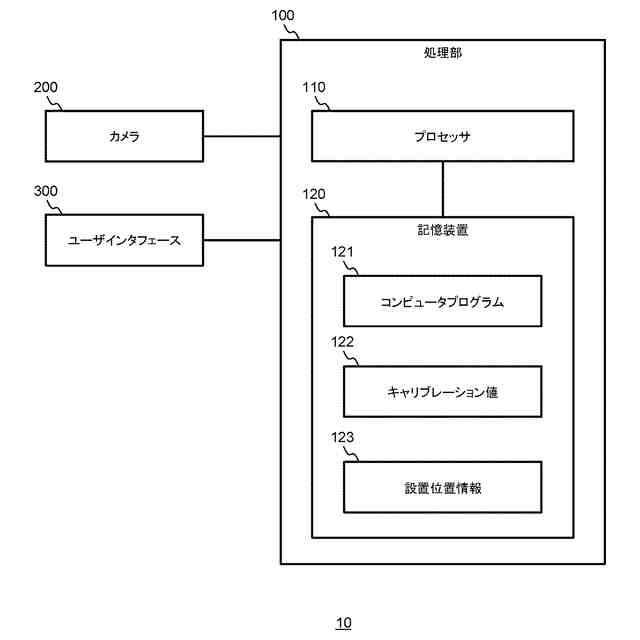
カメラによって撮像される画像を解析して前記画像における深度を推定する1又は複数のプロセッサと、
前記カメラの水平面又は鉛直面に対する設置位置の情報を格納する記憶装置と、
を備え、
前記1又は複数のプロセッサは、さらに、
推定された深度に関するキャリブレーション値を算出する第1処理と、
前記キャリブレーション値に基づいて前記推定された深度のキャリブレーションを実施する第2処理と、
を実行するように構成され、
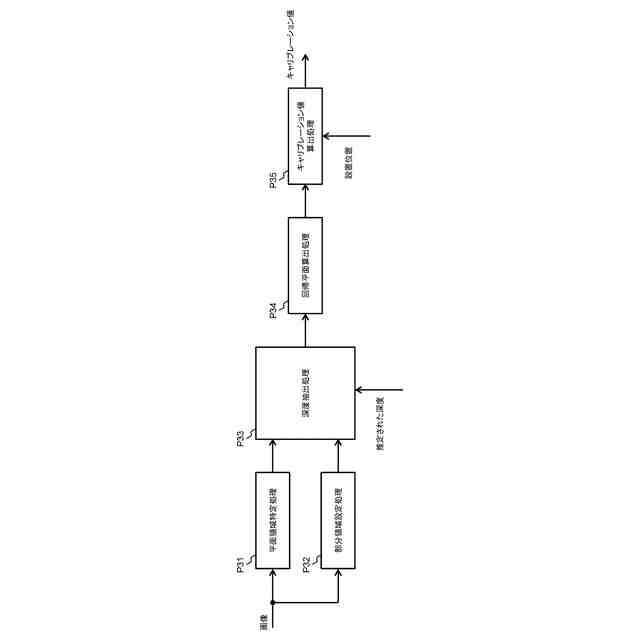
前記第1処理は、
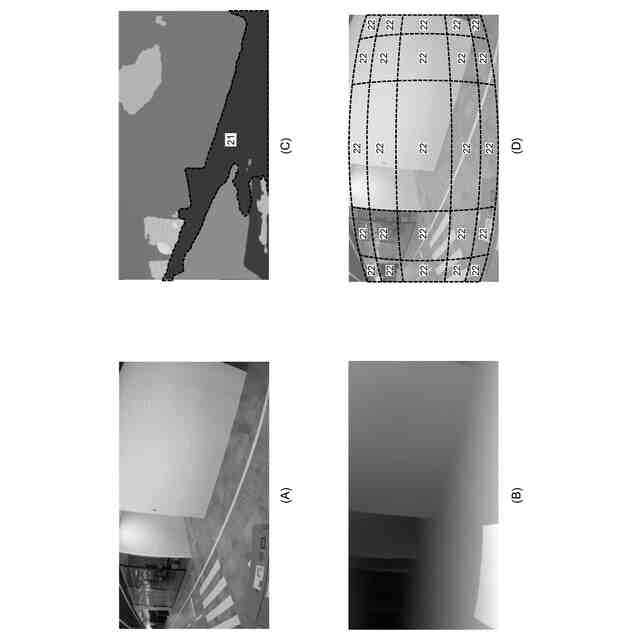
前記画像において前記水平面又は鉛直面が映る平面領域を特定することと、
前記画像に複数の部分領域を設定することと、
前記複数の部分領域の各部分領域に対して、前記各部分領域に含まれる前記平面領域の前記推定された深度に基づいて、前記水平面又は鉛直面を表す回帰平面を算出することと、
前記回帰平面に対する前記カメラの位置と前記設置位置とを比較することにより前記各部分領域に対して前記キャリブレーション値を算出することと、
を含み、
前記第2処理は、前記各部分領域において、対応する前記キャリブレーション値に基づいて前記推定された深度のキャリブレーションを実施する
深度推定装置。
続きを表示(約 1,000 文字)
【請求項2】
請求項1に記載の深度推定装置であって、
前記各部分領域は、曲率を有する辺で囲まれる領域であり、
前記曲率は、前記画像の中心から遠い部分領域ほど大きい
深度推定装置。
【請求項3】
請求項1又は請求項2に記載の深度推定装置であって、
前記各部分領域のサイズは、前記画像の中心から遠い部分領域ほど小さい。
【請求項4】
カメラによって撮像される画像において推定された深度のキャリブレーションをコンピュータにより実行するキャリブレーション方法であって、
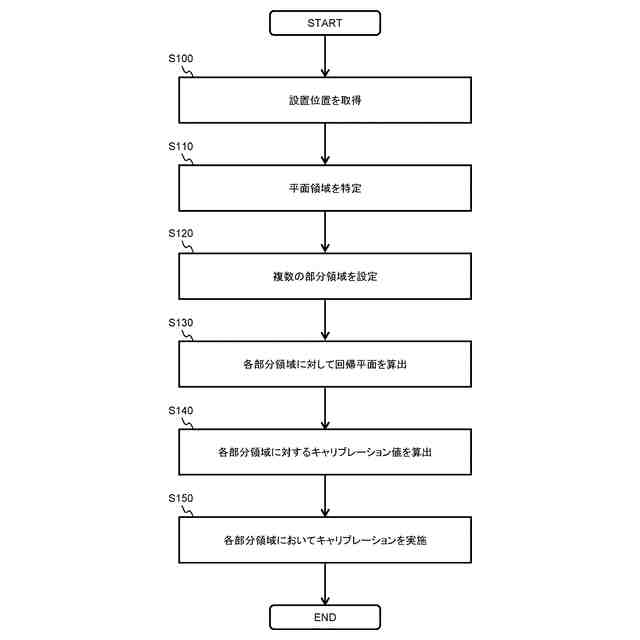
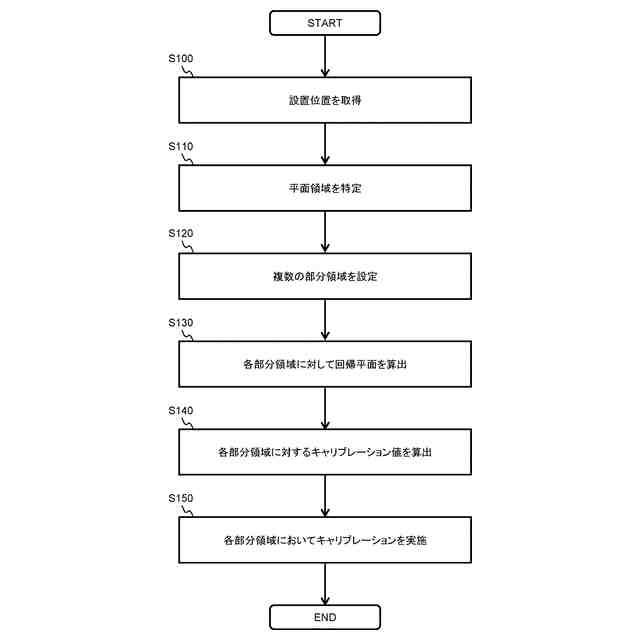
前記カメラの水平面又は鉛直面に対する設置位置の情報を取得する処理と、
前記画像において前記水平面又は鉛直面が映る平面領域を特定する処理と、
前記画像に複数の部分領域を設定する処理と、
前記複数の部分領域の各部分領域に対して、前記各部分領域に含まれる前記平面領域の前記推定された深度に基づいて、前記水平面又は鉛直面を表す回帰平面を算出する処理と、
前記回帰平面に対する前記カメラの位置と前記設置位置とを比較することにより前記各部分領域に対するキャリブレーション値を算出する処理と、
前記各部分領域において、対応する前記キャリブレーション値に基づいて前記推定された深度のキャリブレーションを実施する処理と、
を前記コンピュータにより実行する
キャリブレーション方法。
【請求項5】
カメラによって撮像される画像において推定された深度のキャリブレーションをコンピュータに実行させるキャリブレーションプログラムであって、
前記カメラの水平面又は鉛直面に対する設置位置の情報を取得する処理と、
前記画像において前記水平面又は鉛直面が映る平面領域を特定する処理と、
前記画像に複数の部分領域を設定する処理と、
前記複数の部分領域の各部分領域に対して、前記各部分領域に含まれる前記平面領域の前記推定された深度に基づいて、前記水平面又は鉛直面を表す回帰平面を算出する処理と、
前記回帰平面に対する前記カメラの位置と前記設置位置とを比較することにより前記各部分領域に対するキャリブレーション値を算出する処理と、
前記各部分領域において、対応する前記キャリブレーション値に基づいて前記推定された深度のキャリブレーションを実施する処理と、
を前記コンピュータに実行させる
キャリブレーションプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、カメラによって撮像される画像を解析して画像における深度を推定する技術に関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
特許文献1には、撮像系を複数備える測距装置において、各撮像系の特性を表すカメラパラメータを推定するキャリブレーション方法が開示されている。特許文献1に開示されるキャリブレーション方法では、測距装置と所定の位置関係となるように配置された基準チャートを撮像することにより取得される情報を用いてカメラパラメータを推定する。
【0003】
その他、本技術分野の技術レベルを示す文献として以下の特許文献2及び特許文献3がある。
【先行技術文献】
【特許文献】
【0004】
国際公開第2009/141998号
特開2021-117130号公報
特開2013-187822号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に開示される技術は、複数の画像間の視差を検出することにより画像における深度を認識する装置(例えば、ステレオカメラを用いた装置)に適用される。
【0006】
一方で、単眼カメラ等により撮像された1つの画像を解析することにより画像における深度を推定する技術も考えられている。このような技術は、必要な機器が少ないため、低コストや省スペースといった利点がある。また他の目的で用いられているカメラに適用することも可能という利点がある。特に近年では、学習済みの機械学習モデルを用いて画像の解析を行うことが考えられている。
【0007】
ところで、解析対象となる画像の写りは、撮像するカメラの特性に応じて変化する。このため、推定精度を確保するためには、画像の写りやカメラの特性に応じたキャリブレーションを実施することが求められる。
【0008】
しかしながら、従来、キャリブレーションを実施するためには、人手による作業や追加の装置を必要とし、少なくない手間やコストが生じていた。例えば、学習済みの機械学習モデルを用いて画像の解析を行う場合、パラメータの再学習を行うことでキャリブレーションを実施するといったことが挙げられる。
【0009】
本開示の1つの目的は、画像を解析して画像における深度を推定する技術に関して、人手による作業や追加の装置を必要とすることなく、高精度な深度の推定を実現することを可能とする技術を提供することにある。
【課題を解決するための手段】
【0010】
本開示の第1の観点は、深度推定装置に関する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
17日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
車両
10日前
トヨタ自動車株式会社
車両
9日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
正極層
17日前
トヨタ自動車株式会社
ロータ
9日前
トヨタ自動車株式会社
充電器
3日前
トヨタ自動車株式会社
飛行体
17日前
トヨタ自動車株式会社
自動車
2日前
トヨタ自動車株式会社
電動車
9日前
トヨタ自動車株式会社
電動車
9日前
トヨタ自動車株式会社
蓄電装置
12日前
トヨタ自動車株式会社
制御装置
4日前
トヨタ自動車株式会社
二次電池
9日前
トヨタ自動車株式会社
制御装置
9日前
トヨタ自動車株式会社
判定装置
4日前
トヨタ自動車株式会社
蓄電セル
10日前
トヨタ自動車株式会社
蓄電装置
10日前
トヨタ自動車株式会社
電動車両
3日前
トヨタ自動車株式会社
接合方法
10日前
トヨタ自動車株式会社
製造方法
3日前
トヨタ自動車株式会社
駆動装置
9日前
トヨタ自動車株式会社
蓄電装置
12日前
トヨタ自動車株式会社
駆動装置
9日前
トヨタ自動車株式会社
二次電池
9日前
トヨタ自動車株式会社
制御装置
2日前
トヨタ自動車株式会社
電動車両
9日前
トヨタ自動車株式会社
電気自動車
3日前
トヨタ自動車株式会社
電池パック
17日前
トヨタ自動車株式会社
電池パック
4日前
トヨタ自動車株式会社
電池パック
2日前
トヨタ自動車株式会社
熱管理回路
12日前
トヨタ自動車株式会社
電池パック
17日前
トヨタ自動車株式会社
プロテクタ
9日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ