TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024166122
公報種別
公開特許公報(A)
公開日
2024-11-28
出願番号
2024078114
出願日
2024-05-13
発明の名称
無人航空機撮影システム、無人航空機を用いた建築工事見積作成システム、無人航空機撮影方法、及び無人航空機撮影プログラム
出願人
日鉄物産株式会社
代理人
個人
主分類
B64U
20/87 20230101AFI20241121BHJP(航空機;飛行;宇宙工学)
要約
【課題】既設建物の補修等の見積に関する作業性の向上を図ることができる無人航空機撮影システム、無人航空機を用いた建築工事見積作成システム、無人航空機撮影方法、及び無人航空機撮影プログラムを提供する。
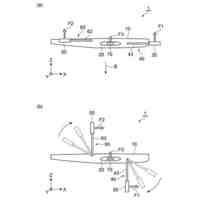
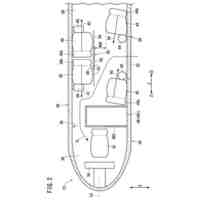
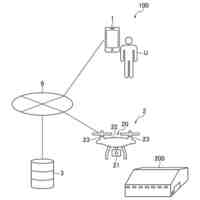
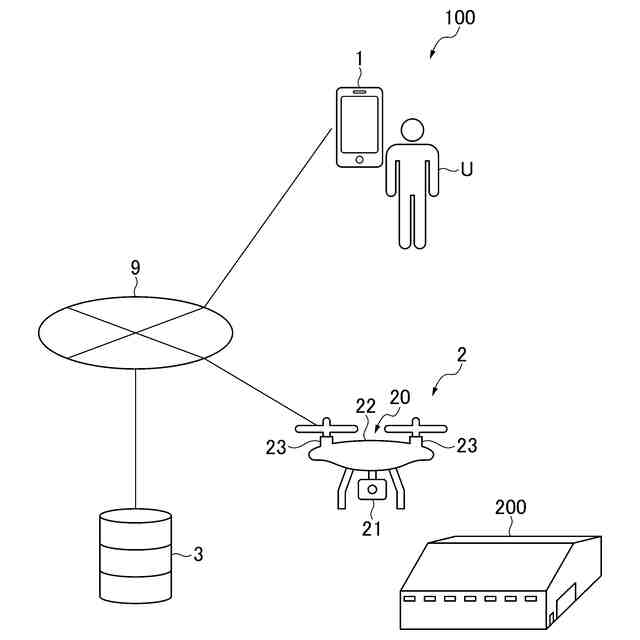
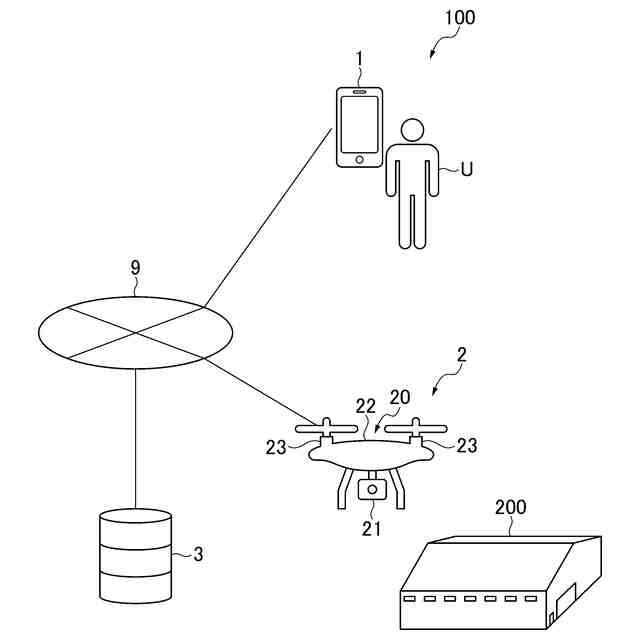
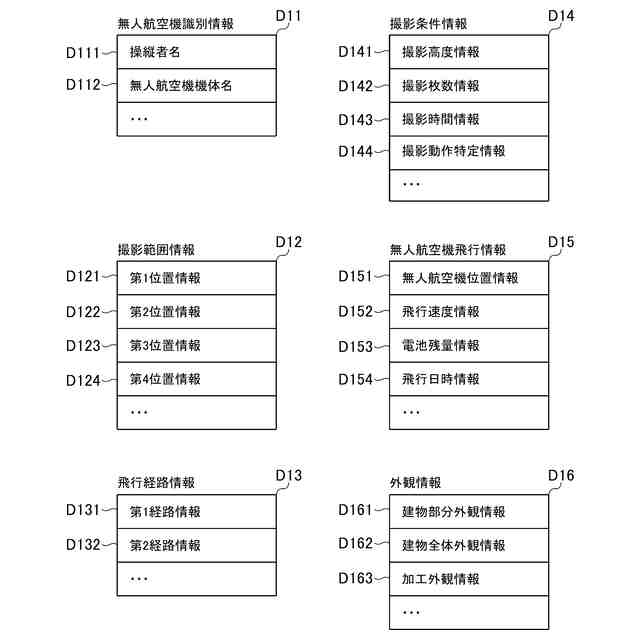
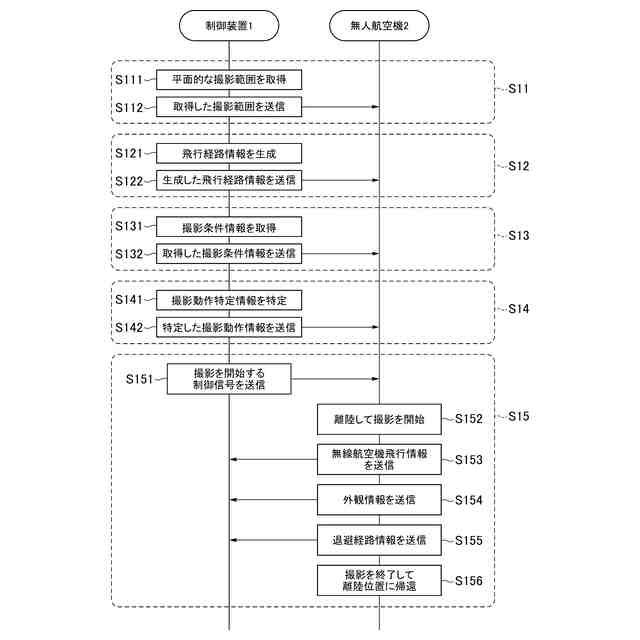
【解決手段】無人航空機撮影システム100は、無人航空機2を用いて既設建物200の外観を撮影するシステムにおいて、無人航空機2と、無人航空機2の平面的な撮影範囲を取得する撮影範囲取得部と、取得された撮影範囲に基づいて無人航空機2の水平方向の飛行経路を生成する飛行経路生成部と、撮影高度と撮影枚数とを取得する撮影条件取得部と、取得された撮影枚数に基づいて飛行経路上の撮影動作を特定する撮影動作特定部と、生成された飛行経路と、取得された前記撮影高度と、に基づいて無人航空機2の飛行動作を制御するとともに、特定された撮影動作に基づいて無人航空機2の撮影動作を制御する動作制御部と、を備えることを特徴とする。
【選択図】図1
特許請求の範囲
【請求項1】
無人航空機を用いて既設建物の外観を撮影する無人航空機撮影システムにおいて、
無人航空機と、
前記無人航空機の平面的な撮影範囲を取得する撮影範囲取得部と、
前記撮影範囲取得部により取得された前記撮影範囲に基づいて前記無人航空機の水平方向の飛行経路を生成する飛行経路生成部と、
前記撮影範囲取得部により取得された前記撮影範囲における撮影高度と撮影枚数とを取得する撮影条件取得部と、
前記撮影条件取得部により取得された前記撮影枚数に基づいて前記飛行経路上の撮影動作を特定する撮影動作特定部と、
前記飛行経路生成部により生成された前記飛行経路と、前記撮影条件取得部により取得された前記撮影高度と、に基づいて前記無人航空機の飛行動作を制御するとともに、前記撮影動作特定部により特定された前記撮影動作に基づいて前記無人航空機の前記撮影動作を制御する動作制御部と、
を備えること
を特徴とする無人航空機撮影システム。
続きを表示(約 2,400 文字)
【請求項2】
前記撮影範囲取得部は、多角形状の前記撮影範囲を取得し、
前記飛行経路生成部は、前記撮影範囲取得部により取得された多角形状の前記撮影範囲の各辺のうち最長辺に略直交する方向を含む前記飛行経路を生成すること
を特徴とする請求項1に記載の無人航空機撮影システム。
【請求項3】
前記動作制御部は、前記飛行経路生成部により生成された前記飛行経路上において前記無人航空機に搭載されたバッテリーの残量が予め設定された下限値を下回ったとき前記無人航空機を自動的に離陸地点に退避させ、その後前記バッテリーの残量が所定値以上になったとき前記退避を開始した前記飛行経路上の地点から撮影を再開するように前記無人航空機の動作を制御すること
を特徴とする請求項1に記載の無人航空機撮影システム。
【請求項4】
前記撮影範囲取得部、前記飛行経路生成部、前記撮影条件取得部、前記撮影動作特定部、及び前記動作制御部から独立して制御可能とされ、前記無人航空機により撮影された前記既設建物の外観を示す二次元外観情報を無線通信網を介して受信するとともに、受信した当該二次元外観情報に基づく前記既設建物を示す三次元モデリング画像を取得するサーバをさらに備えること
を特徴とする請求項1に記載の無人航空機撮影システム。
【請求項5】
前記無人航空機により撮影された前記既設建物の外観を示す外観情報を無線通信網を介して受信するサーバと、
前記サーバに対する前記外観情報の送信を制御する送信制御部と、
をさらに備えること
を特徴とする請求項1に記載の無人航空機撮影システム。
【請求項6】
無人航空機を識別する無人航空機識別情報とDIPS(Drone/UAS Information Platform System)又はFISS(Flight Information Sharing System)における無人航空機の飛行許可を示す承認情報とが紐づけられたデータベースを参照した上で、前記無人航空機に対応する承認情報が有効であることを認証する認証部をさらに備え、
前記動作制御部は、前記認証部により前記承認情報が有効であることが認証された後に前記無人航空機の動作を制御すること
を特徴とする請求項1に記載の無人航空機撮影システム。
【請求項7】
前記撮影高度に基づく前記撮影枚数又は前記撮影枚数に基づく前記撮影高度を算出する算出部をさらに備え、
前記撮影条件取得部は、前記撮影枚数及び前記撮影高度のうち何れか一方を先に取得した上で、前記算出部により算出される何れか他方を取得すること
を特徴とする請求項1に記載の無人航空機撮影システム。
【請求項8】
前記無人航空機の撮影間隔と、前記撮影間隔だけ離間した互いに隣接する2地点それぞれにおける前記無人航空機の画角が互いに重なる重複幅として予め設定された設定重複幅と、に基づく前記撮影高度を算出する算出部をさらに備え、
前記撮影条件取得部は、前記撮影間隔を取得した上で、前記算出部により算出される前記撮影高度を取得すること
を特徴とする請求項1に記載の無人航空機撮影システム。
【請求項9】
無人航空機を用いて既設建物の建築工事の見積を作成する無人航空機を用いた建築工事見積作成システムにおいて、
請求項1~8の何れかに記載の無人航空機撮影システムと、
前記無人航空機撮影システムにより撮影された既設建物の外観を示す外観情報から指定される建築工事の工事範囲を取得する工事範囲取得部と、
ユーザから指定される前記建築工事に用いる建材の識別情報を取得する建材情報取得部と、
前記工事範囲取得部により取得された前記工事範囲と、前記建材情報取得部により取得された前記建材の識別情報と、から前記建築工事に用いる建材の部数を算出する建材部数算出部と、
建材の識別情報と、建材の単価と、が予め紐づけられたデータベースを参照した上で、前記建材情報取得部により取得された前記建材の識別情報に応じた建材の単価を当該データベースから取得する単価取得部と、
前記建材部数算出部により算出された前記建材の部数と、前記単価取得部により取得された前記建材の単価と、に応じた建築工事金額を出力する建築工事金額出力部と、
を備えること
を特徴とする無人航空機を用いた建築工事見積作成システム。
【請求項10】
無人航空機を用いて既設建物の外観を撮影する無人航空機撮影方法において、
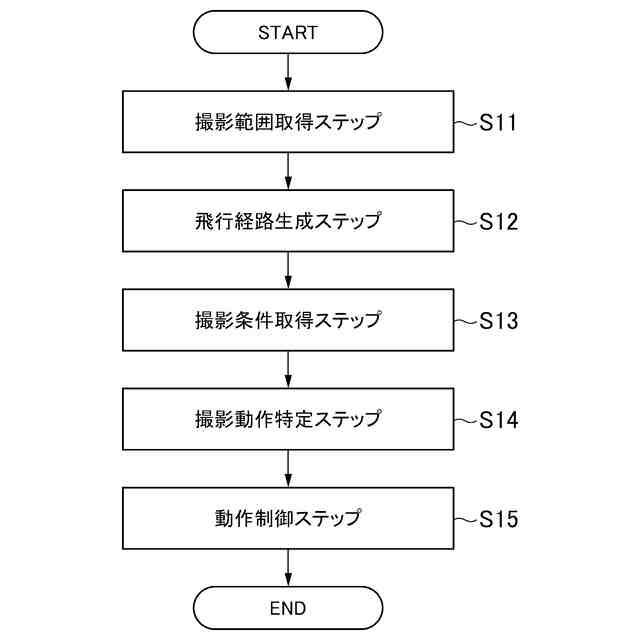
無人航空機の平面的な撮影範囲を取得する撮影範囲取得ステップと、
前記撮影範囲取得ステップにより取得された前記撮影範囲に基づいて前記無人航空機の水平方向の飛行経路を生成する飛行経路生成ステップと、
前記撮影範囲取得ステップにより取得された前記撮影範囲における撮影高度と撮影枚数とを取得する撮影条件取得ステップと、
前記撮影条件取得ステップにより取得された前記撮影枚数に基づいて前記飛行経路上の撮影動作を特定する撮影動作特定ステップと、
前記飛行経路生成ステップにより生成された前記飛行経路と、前記撮影条件取得ステップにより取得された前記撮影高度と、に基づいて前記無人航空機の飛行動作を制御するとともに、前記撮影動作特定ステップにより特定された前記撮影動作に基づいて前記無人航空機の前記撮影動作を制御する動作制御ステップと、
を有すること
を特徴とする無人航空機撮影方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この発明は、特に高所における既設建物の補修等(補修及び修繕を含む)の見積や施工に際して用いる無人航空機撮影システム、無人航空機を用いた建築工事見積作成システム、無人航空機撮影方法、及び無人航空機撮影プログラムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来、既設建物の屋根や壁面の補修等が必要か否かを検討するために、建築業者が高所作業をする必要があった。近年では、無人航空機(ドローン)を用いることで、屋根や壁面の外観を撮影することで、高所での人力作業が不要となり、補修等の見積や施工に際して安全性や作業性が飛躍的に向上した。
【0003】
特許文献1には、既設建物の屋根の塗装又は防水工事の見積を作成するために屋根の画像を撮影するシステムが開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2018-55351号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に開示されたシステムによれば、正確かつ安価に屋根の塗装又は防水工事見積を作成することができる。しかしながら、特許文献1に開示されたシステムでは、無人航空機による画像撮影時の走査がユーザ(作業者等)の操縦に依存するため、既設建物の補修等の見積に関する作業性を向上できない問題がある。
【0006】
そこで本発明は、上述した問題点に鑑みて案出されたものであり、その目的とするところは、既設建物の補修等の見積に関する作業性の向上を図ることができる無人航空機撮影システム、無人航空機を用いた建築工事見積作成システム、無人航空機撮影方法、及び無人航空機撮影プログラムを提供することにある。
【課題を解決するための手段】
【0007】
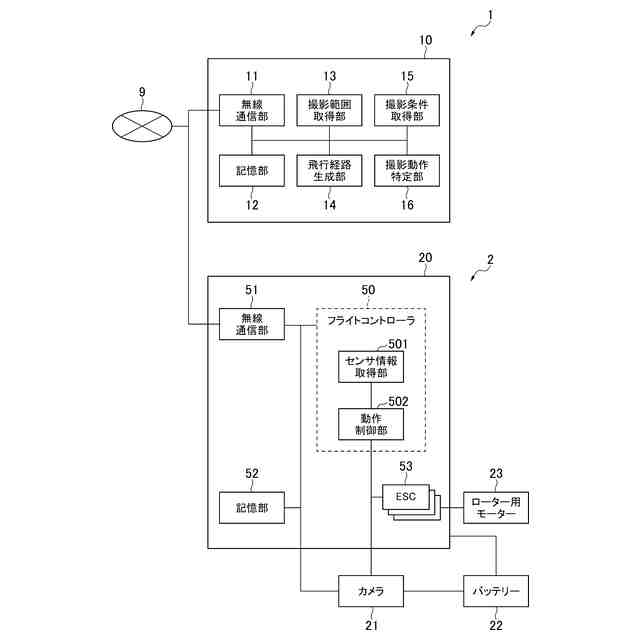
第1発明における無人航空機撮影システムは、無人航空機を用いて既設建物の外観を撮影する無人航空機撮影システムにおいて、無人航空機と、前記無人航空機の平面的な撮影範囲を取得する撮影範囲取得部と、前記撮影範囲取得部により取得された前記撮影範囲に基づいて前記無人航空機の水平方向の飛行経路を生成する飛行経路生成部と、前記撮影範囲取得部により取得された前記撮影範囲における撮影高度と撮影枚数とを取得する撮影条件取得部と、前記撮影条件取得部により取得された前記撮影枚数に基づいて前記飛行経路上の撮影動作を特定する撮影動作特定部と、前記飛行経路生成部により生成された前記飛行経路と、前記撮影条件取得部により取得された前記撮影高度と、に基づいて前記無人航空機の飛行動作を制御するとともに、前記撮影動作特定部により特定された前記撮影動作に基づいて前記無人航空機の前記撮影動作を制御する動作制御部と、を備えることを特徴とする。
【0008】
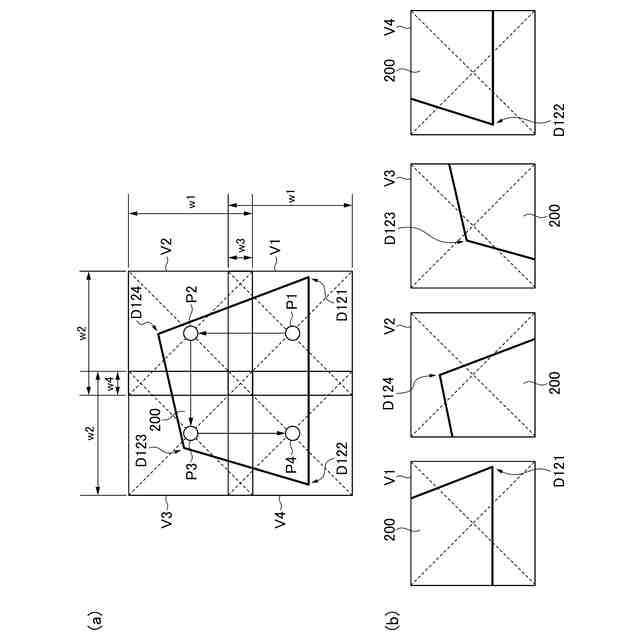
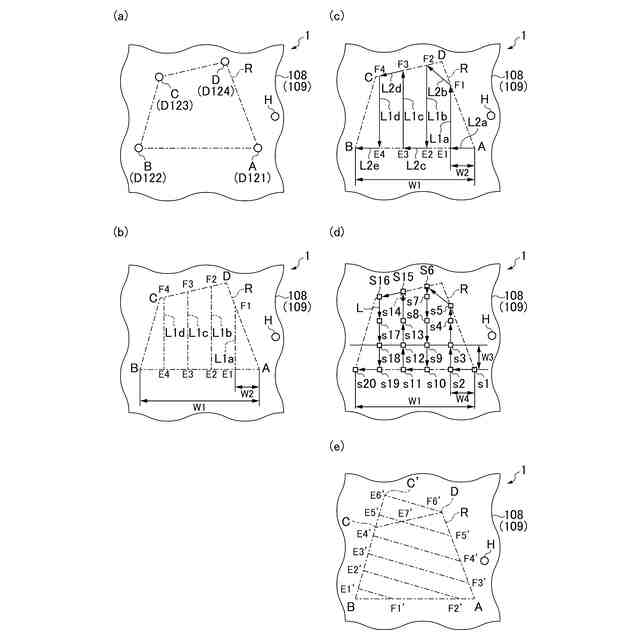
第2発明における無人航空機撮影システムは、第1発明において、前記撮影範囲取得部は、多角形状の前記撮影範囲を取得し、前記飛行経路生成部は、前記撮影範囲取得部により取得された多角形状の前記撮影範囲の各辺のうち最長辺に略直交する方向を含む前記飛行経路を生成することを特徴とする。
【0009】
第3発明における無人航空機撮影システムは、第1発明において、前記動作制御部は、前記飛行経路生成部により生成された前記飛行経路上において前記無人航空機に搭載されたバッテリーの残量が予め設定された下限値を下回ったとき前記無人航空機を自動的に離陸地点に退避させ、その後前記バッテリーの残量が所定値以上になったとき前記退避を開始した前記飛行経路上の地点から撮影を再開するように前記無人航空機の動作を制御することを特徴とする。
【0010】
第4発明における無人航空機撮影システムは、第1発明において、前記撮影範囲取得部、前記飛行経路生成部、前記撮影条件取得部、前記撮影動作特定部、及び前記動作制御部から独立して制御可能とされ、前記無人航空機により撮影された前記既設建物の外観を示す二次元外観情報を無線通信網を介して受信するとともに、受信した当該二次元外観情報に基づく前記既設建物を示す三次元モデリング画像を取得するサーバをさらに備えることを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日鉄物産株式会社
無人航空機撮影システム、無人航空機を用いた建築工事見積作成システム、無人航空機撮影方法、及び無人航空機撮影プログラム
6日前
日鉄物産株式会社
無人航空機を用いた建築工事見積作成システム、無人航空機を用いた建築工事見積作成方法、及び無人航空機を用いた建築工事見積作成プログラム
6日前
個人
飛行体
7か月前
個人
ドローン係留装置
10か月前
株式会社三圓
浮上装置
2か月前
個人
空港用貨物搬送車
6か月前
個人
飛行艇
4か月前
個人
ドローンの計測操作方法2
2か月前
個人
ドローンの計測操作方法3
2か月前
キヤノン電子株式会社
磁気トルカ
3か月前
個人
自由落下運航システム
8か月前
個人
人工衛星推進材循環エンジン
7か月前
個人
マルチコプター型電気飛行機
7か月前
個人
ドローン消音装置
26日前
合同会社アドエア
飛行体落下補助装置
10か月前
株式会社中北製作所
羽ばたき装置
6か月前
株式会社セネック
ドローンポート
5か月前
株式会社セネック
ドローンポート
5か月前
個人
飛行体
10か月前
株式会社SUBARU
電動航空機
6か月前
株式会社中北製作所
羽ばたき装置
7か月前
国立大学法人九州大学
飛行体
8か月前
株式会社SUBARU
回転翼航空機
6か月前
全日本空輸株式会社
ドーリシステム
1か月前
SkyDeer株式会社
衛星制御方法
8か月前
HDサービス合同会社
カメラ装着装置
28日前
本田技研工業株式会社
航空機
1か月前
株式会社デンソー
推進装置
4か月前
株式会社デンソー
推進装置
10か月前
本田技研工業株式会社
移動体
1か月前
株式会社小糸製作所
航空機用灯具
3か月前
本田技研工業株式会社
航空機
1か月前
本田技研工業株式会社
移動体
3か月前
本田技研工業株式会社
移動体
3か月前
株式会社SUBARU
構造体の製造方法
3か月前
株式会社日立製作所
推進装置
6日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ