TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024165020
公報種別
公開特許公報(A)
公開日
2024-11-28
出願番号
2023080825
出願日
2023-05-16
発明の名称
制御処理装置、制御処理方法、及び制御処理システム
出願人
東芝インフラシステムズ株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
B61L
23/00 20060101AFI20241121BHJP(鉄道)
要約
【課題】気象状況の変化による影響を抑制可能な鉄道車両の制御処理装置、制御処理方法、及び制御処理システムを提供する。
【解決手段】本実施形態に係る制御処理装置は、画像取得部と、線路情報取得部と、線路検出部と、第1視程算出部と、を備える。画像取得部は、鉄道車両の進行方向の撮像画像を得る。線路検出部は、撮像画像中の鉄道車両が進行する方向の線路を所定の基準にしたがい検出する。第1視程算出部は、検出された線路の長さに基づき、視程に関する第1視程値を演算する。
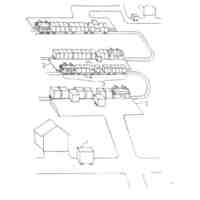
【選択図】図1
特許請求の範囲
【請求項1】
鉄道車両の進行方向の撮像画像を得る画像取得部と、
前記撮像画像中の前記鉄道車両が進行する方向の線路を所定の基準にしたがい検出する線路検出部と、
前記検出された線路の長さに基づき、視程に関する第1視程値を演算する第1視程算出部と、
を備える、制御処理装置。
続きを表示(約 910 文字)
【請求項2】
前記第1視程算出部は、前記検出された線路の長さが長くなるに従い、前記第1視程値を大きくする、請求項1に記載の制御処理装置。
【請求項3】
前記第1視程算出部は、前記検出された線路の長さと、第1基準値との差分に応じて、前記第1視程値を演算する、請求項1に記載の制御処理装置。
【請求項4】
前記第1視程算出部は、前記検出された線路の長さと、前記鉄道車両の位置に応じて変動する第2基準値との差分に応じて、前記第1視程値を演算する、請求項1に記載の制御処理装置。
【請求項5】
ミリ波、及びレーザ光のいずれかの照射波を照射する照射部と、
前記ミリ波、及びレーザ光のいずれかが反射した反射波を受信する受信部と、
前記受信部が、受信した所定時間内の前記反射波に基づく信号強度に応じて、視程に関する第2視程値を演算する第2視程算出部と、を更に備える、請求項1乃至4のいずれか一項に記載の制御処理装置。
【請求項6】
前記第1視程値、及び前記第2視程値は、それぞれ視程の値であり、
前記第1視程値、及び前記第2視程値の少なくとも一方に基づき、視程値を生成する視程判定部を、を更に備える、請求項5に記載の制御処理装置。
【請求項7】
前記視程判定部は、前記線路検出部の検出結果に応じて、前記第1視程値、及び前記第2視程値の少なくとも一方を選択する判定を行う、請求項6に記載の制御処理装置。
【請求項8】
前記視程判定部は、外界の照度、及び時刻の少なくとも一方に応じて、前記第1視程値、及び前記第2視程値のいずれかを選択する判定を行う、請求項7に記載の制御処理装置。
【請求項9】
前記視程値に応じて、前記鉄道車両の制御処理を変更する制御部を、更に備える、請求項7に記載の制御処理装置。
【請求項10】
前記制御部は、前記視程値に応じて、前記鉄道車両の制動距離、及び速度の少なくとも一方を変更する、請求項9に記載の制御処理装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、制御処理装置、制御処理方法、及び制御処理システムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
鉄道車両、自動車などの自動運転化が進められている。このような自動運転化での運転支援、或いは自動運転を行う制御処理装置では、車両を減速させたり、障害物に対して車両を停止させたり、警笛を鳴らさせたりなどの制御処理を実行する。ところが、気象状況により、制御処理に影響を受けてしまう恐れがある。
【先行技術文献】
【特許文献】
【0003】
特開2005-338941号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
気象状況の変化による影響を抑制可能な制御処理装置、制御処理方法、及び制御処理システムを提供する。
【課題を解決するための手段】
【0005】
本実施形態に係る制御処理装置は、画像取得部と、線路情報取得部と、線路検出部と、第1視程算出部と、を備える。画像取得部は、鉄道車両の進行方向の撮像画像を得る。線路検出部は、撮像画像中の鉄道車両が進行する方向の線路を所定の基準にしたがい検出する。第1視程算出部は、検出された線路の長さに基づき、視程に関する第1視程値を演算する。
【図面の簡単な説明】
【0006】
本実施形態に係る制御処理システムの構成例を示すブロック図。
本実施形態に係る制御処理装置の詳細な構成例を示すブロック図。
第1モードでの処理例を示す図。
第2モードでの処理例を示す図。
第1視程処理部の処理例を示すフローチャート。
第2実施形態に係る制御処理装置の構成例を示すブロック図。
制御処理装置の処理例を示すフローチャート。
第3実施形態に係る制御処理装置の構成例を示すブロック図。
第3実施形態に係る制御処理装置の処理例を示すフローチャート。
第4実施形態に係る制御処理装置の構成例を示すブロック図。
第4実施形態に係る制御処理装置の処理例を示すフローチャート。
第5実施形態に係る制御処理装置の構成例を示すブロック図。
第5実施形態に係る制御処理装置の処理例を示すフローチャート。
第6実施形態に係る制御処理装置の構成例を示すブロック図。
第6実施形態に係る制御処理装置の処理例を示すフローチャート。
【発明を実施するための形態】
【0007】
以下、図面を参照して、本発明の実施形態について説明する。なお、本件明細書に添付する図面においては、図示と理解のしやすさの便宜上、適宜縮尺及び縦横の寸法比等を、実物のそれらから変更し誇張してある。
【0008】
(第1実施形態)
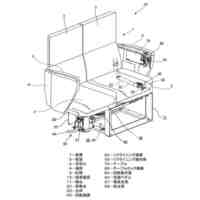
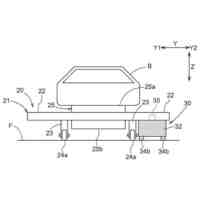
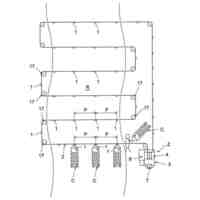
図1は、本実施形態に係る制御処理システム1の構成例を示すブロック図である。図1に示すように、本実施形態に係る制御処理システム1は、鉄道車両5に搭載される制御処理装置10と、走行位置情報収集装置20と、障害物検知装置30と、モータ40と、警笛部50と、通信装置60と、を備える。鉄道車両5は、固定された軌道である線路R100上を走行する。集中制御室M110には、監視装置70と、表示装置80が配置される。
【0009】
制御処理装置10は、カメラ111で撮像した画像を用いて鉄道車両5の制御処理を実行する。例えば、制御処理装置10は、視程を算出して、視程に応じた制御処理を実行することが可能である。
【0010】
カメラ111は、例えばR、G、B画像を走行動画として連続的に撮像可能である。このカメラ111は、例えば鉄道車両5の前方に固定されている。このため、鉄道車両5が線路上を走行中に撮像した走行動画を構成する各画像は、例えば同じ位置で撮像された場合には、同じアングル且つ同じ撮像倍率の画像となる。なお、本実施形態に係るカメラ111が画像取得部に対応する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
コンテナ輸送システム
8か月前
日本信号株式会社
検査装置
4か月前
個人
車両及び走行システム
2日前
東光産業株式会社
電動台車
9か月前
コイト電工株式会社
暖房装置
8か月前
コイト電工株式会社
暖房装置
8か月前
株式会社新陽社
発車標
7か月前
コイト電工株式会社
座席装置
10か月前
日本信号株式会社
ホーム柵装置
22日前
日本車輌製造株式会社
鉄道車両
8か月前
日本車輌製造株式会社
鉄道車両
8か月前
富士電機株式会社
戸閉装置
11か月前
川崎車両株式会社
鉄道車両用パネル
2か月前
カヤバ株式会社
鉄道車両用制振装置
8か月前
カヤバ株式会社
鉄道車両用制振装置
4か月前
保線機器整備株式会社
保線用カート
2か月前
株式会社ロッソ
移動体案内システム
11か月前
近畿車輌株式会社
鉄道車両の床構造
4か月前
近畿車輌株式会社
鉄道車両の床構造
4か月前
近畿車輌株式会社
鉄道車両の床構造
4か月前
日本信号株式会社
物体検知装置
19日前
日本信号株式会社
ホーム安全システム
23日前
日本信号株式会社
踏切道監視システム
4か月前
株式会社ダイフク
搬送設備
4日前
株式会社ダイフク
搬送設備
10か月前
ヤマハ発動機株式会社
無人搬送車
22日前
シャープ株式会社
表示装置
5か月前
ヤマハ発動機株式会社
無人搬送車
22日前
前川鉄工株式会社
ロープ駆動装置
5か月前
ヤマハ発動機株式会社
無人搬送車
22日前
株式会社ダイフク
搬送設備
7か月前
日本製鉄株式会社
鉄道車両
1か月前
株式会社京三製作所
車上装置
1か月前
日本製鉄株式会社
鉄道車両
2か月前
株式会社フジキカイ
リニア搬送装置
7か月前
日本車輌製造株式会社
長尺用無人搬送台車
7か月前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ