TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024162543
公報種別
公開特許公報(A)
公開日
2024-11-21
出願番号
2023078134
出願日
2023-05-10
発明の名称
制御装置
出願人
株式会社日立製作所
代理人
弁理士法人サンネクスト国際特許事務所
主分類
G05B
13/02 20060101AFI20241114BHJP(制御;調整)
要約
【課題】PID制御を用いる制御系において、オーバーシュート発生期間など応答時の特定期間における出力を優先して所望のプロフィールとなるように、PID制御のゲイン値を自動調整することが可能な技術を提供する。
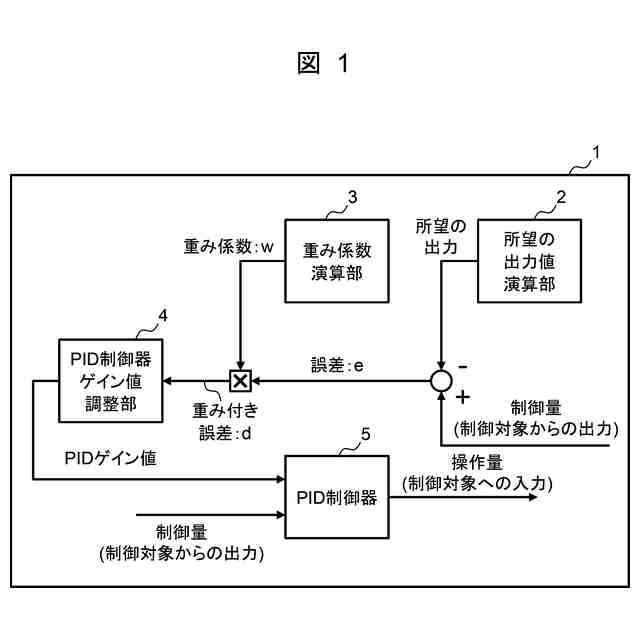
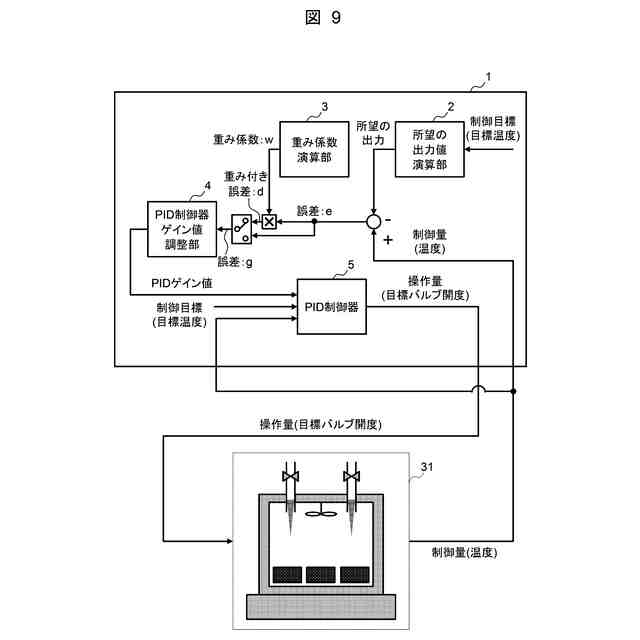
【解決手段】PID制御のPIDゲイン値を自動チューニングする装置において、ある時刻tにおける制御対象の所望の出力z(t)を演算する手段と、ある時刻tにおける制御対象の出力y(t)と前記所望の出力z(t)との誤差e(t)に重み係数w(t)を乗じた値d1(t)(=w(t)×e(t))もしくは、前記出力y(t)と前記所望の出力z(t)との誤差e(t)の二乗に重み係数w(t)を乗じた値d2(t)(=w(t)×e(t)^2)に基づく値が小さくなるように、PID制御の各制御ゲイン値を自動チューニングする手段とを備えたことを特徴とする制御装置である。
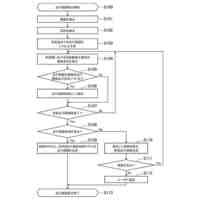
【選択図】図1
特許請求の範囲
【請求項1】
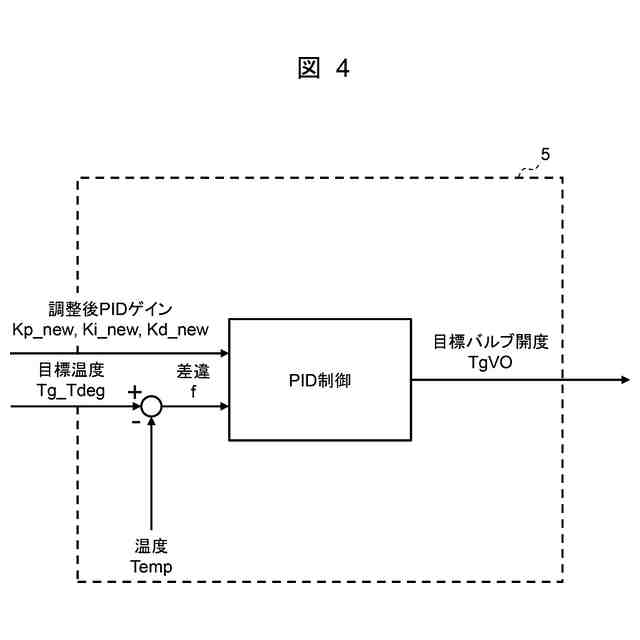
PID制御のPIDゲイン値を自動チューニングする装置において、
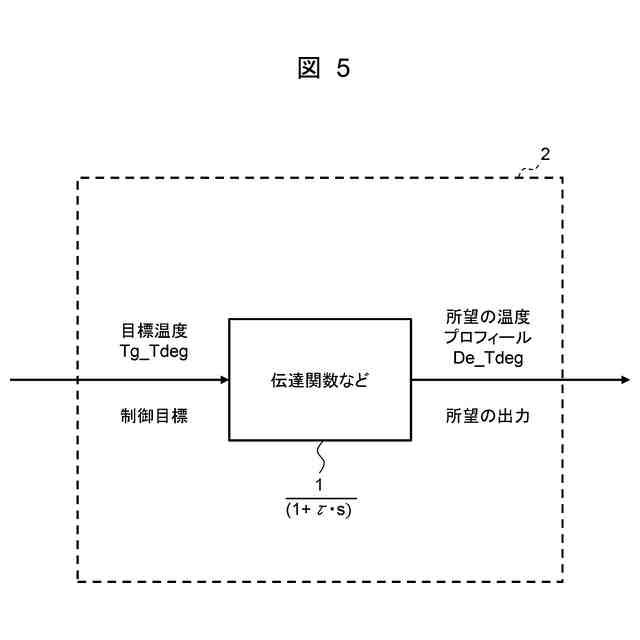
ある時刻tにおける制御対象の所望の出力z(t)を演算する手段と
ある時刻tにおける制御対象の出力y(t)と前記所望の出力z(t)との誤差e(t)に
重み係数w(t)を乗じた値d1(t)(=w(t)×e(t))もしくは、
前記出力y(t)と前記所望の出力z(t)との誤差e(t)の二乗に
重み係数w(t)を乗じた値d2(t)(=w(t)×e(t)^2)に
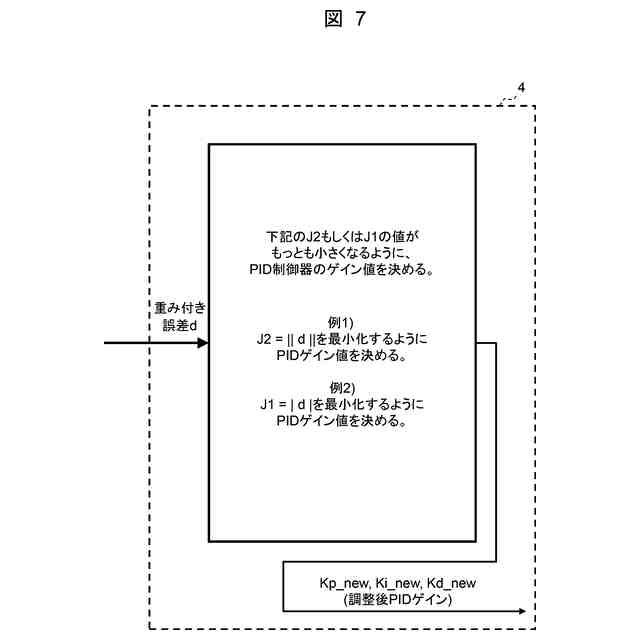
基づく値が小さくなるように、
PID制御の各制御ゲイン値を自動チューニングする手段とを
備えたことを特徴とする制御装置。
続きを表示(約 860 文字)
【請求項2】
請求項1において、
制御目標r(t)を演算する手段と、
前記制御目標r(t)を前記PID制御の制御目標とし、
前記制御目標r(t)を所望の出力z(t)を演算する手段の入力とすることを
特徴とする制御装置。
【請求項3】
請求項1において、
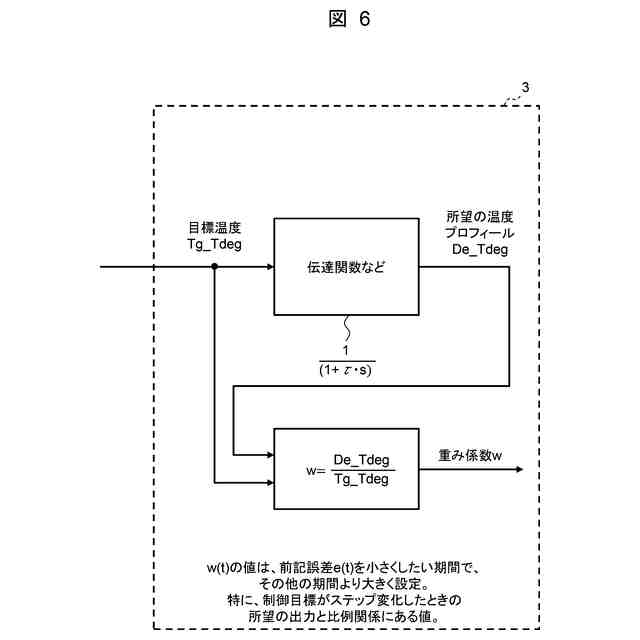
前記重み係数w(t)の値は、前記誤差e(t)を小さくしたい期間でその他の期間より大きくなることを
特徴とする制御装置。
【請求項4】
請求項1において、
前記重み係数w(t)は、制御目標がステップ変化したときの前記制御対象の所望の出力z(t)と比例関係にあるk×z(t)であることを
特徴とする制御装置。
【請求項5】
請求項1において、
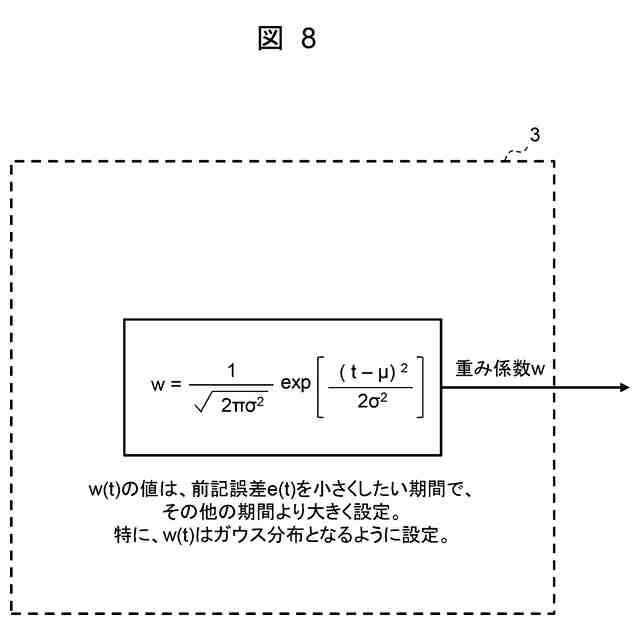
前記重み係数w(t)は、前記誤差e(t)を小さくしたい期間に平均値が存在するガウス分布となることを
特徴とする制御装置。
【請求項6】
請求項1において、
前記d1(t)に基づく値は、d1(t)の二乗和誤差Σd1(t)^2であることを
特徴とする制御装置。
【請求項7】
請求項1において、
前記PID制御の各制御ゲイン値を自動チューニングする手段はデータ駆動制御FRITであることを
特徴とする制御装置。
【請求項8】
請求項1において、
前記PID制御の各制御ゲイン値を自動チューニングする手段の入力として、
前記重み係数w(t)を乗じた値(d1(t)もしくはd2(t))に基づく値、もしくは前記e(t)に基づく値かを切り替える手段を備えたことを
特徴とする制御装置。
【請求項9】
請求項1において、
前記制御装置が制御する対象は、加熱炉などの温度制御もしくは
モータを用いた回転数制御もしくは位置制御であることを
特徴とする制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御装置に関するものであり、特に、制御対象の応答が所望のプロフィールとなるようにPID制御のゲイン値を自動チューニングする制御装置に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
本技術の背景技術として、特開2008-181221号公報(特許文献1)がある。この文献には、「PID制御対象を制御するためのPIDパラメータを決定するPIDパラメータ決定手段と、該PIDパラメータ決定手段により決定されたPIDパラメータを用いて、上記制御対象を制御する制御手段とを備えたPID制御装置であって、上記PIDパラメータ決定手段は、時刻tの時点での上記制御対象への入力、該制御対象からの出力および目標値をそれぞれu(t)、y(t)およびr(t)とし、上記入力の差分に対する重み係数をλとし、むだ時間をkとし、差分演算子をΔとしたとき、φ(t+k)=y(t+k)-r(t)+λΔu(t)で表される一般化出力φ(t+k)が小さくなるように、上記PIDパラメータを決定するよう構成されていることを特徴とするPID制御装置。([請求項1]参照)」と記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2008-181221号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、前述の先行技術(特許文献1)は、自動チューニングに用いる値として、制御対象への入力信号の変化分に重み係数を施した項が存在する式とすることで、入力信号が大きく変化するようなゲイン値とならないようにチューニングするものであり、オーバーシュートなどの応答時の特定期間における制御対象からの出力のプロフィールを自動調整するものではない。
【課題を解決するための手段】
【0005】
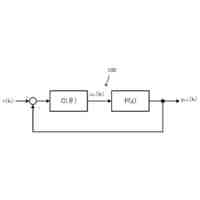
上記課題を解決するために、例えば特許請求範囲の記載の構成を採用する。本願は、上記課題を解決する手段を複数含んでいるが、例えば、
PID制御のPIDゲイン値を自動チューニングする装置において、
ある時刻tにおける制御対象の所望の出力z(t)を演算する手段と
ある時刻tにおける制御対象の出力y(t)と前記所望の出力z(t)との誤差e(t)に
重み係数w(t)を乗じた値d1(t)(=w(t)×e(t))もしくは、
前記出力y(t)と前記所望の出力z(t)との誤差e(t)の二乗に
重み係数w(t)を乗じた値d2(t)(=w(t)×e(t)^2)に
基づく値が小さくなるように、
PID制御の各制御ゲイン値を自動チューニングする手段とを
備えたことを特徴とする制御装置である。
【0006】
また、例えば、
制御目標r(t)を演算する手段と、
前記制御目標r(t)を前記PID制御の制御目標とし、
前記制御目標r(t)を所望の出力z(t)を演算する手段の入力とすることを
特徴とする制御装置である。
【0007】
また、例えば、
前記重み係数w(t)の値は、前記誤差e(t)を小さくしたい期間でその他の期間より大きくなることを
特徴とする制御装置である。
【0008】
また、例えば、
前記重み係数w(t)は、制御目標がステップ変化したときの前記制御対象の所望の出力z(t)と比例関係にあるk×z(t)であることを
特徴とする制御装置である。
【0009】
また、例えば、
前記重み係数w(t)は、前記誤差e(t)を小さくしたい期間に平均値が存在するガウス分布となることを
特徴とする制御装置である。
【0010】
また、例えば、
前記d1(t)に基づく値は、d1(t)の二乗和誤差Σd1(t)^2であることを
特徴とする制御装置である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電圧回路
16日前
エイブリック株式会社
ボルテージレギュレータ
16日前
株式会社やまびこ
走行制御装置
4日前
株式会社ダイヘン
搬送車
16日前
株式会社ダイヘン
搬送車
16日前
株式会社ダイヘン
搬送車
16日前
株式会社ダイヘン
搬送車
16日前
株式会社デンソー
診断装置
2日前
井関農機株式会社
作業車両
12日前
株式会社マキタ
作業ロボット
4日前
株式会社マキタ
自律移動システム
4日前
株式会社日立製作所
制御装置
4日前
ダイハツ工業株式会社
無人搬送装置及びその制御方法
12日前
三菱ロジスネクスト株式会社
監視システム
4日前
キヤノン株式会社
情報処理装置、方法、及びプログラム
16日前
ローム株式会社
基準電圧生成回路、半導体装置
16日前
三菱重工業株式会社
状態量監視システム及びその運用方法
10日前
トヨタ自動車株式会社
制御装置、および、制御方法
9日前
本田技研工業株式会社
制御装置、制御方法、およびプログラム
16日前
株式会社アイシン
数値制御装置および数値制御方法
9日前
本田技研工業株式会社
制御装置、制御方法、およびプログラム
16日前
株式会社日立産機システム
診断方法、診断処理装置、端末、診断システム
16日前
株式会社エアロネクスト
飛行体の制御方法
15日前
日本精工株式会社
アクチュエータ装置の制御装置、および制御方法
16日前
株式会社京三製作所
推定方法、及び推定装置
9日前
トヨタ自動車株式会社
情報処理システム、情報処理プログラム、及び情報処理方法
2日前
キヤノン株式会社
自走運搬装置、自走運搬方法、及びコンピュータプログラム
17日前
三菱重工業株式会社
情報処理装置、情報処理方法、及びプログラム
10日前
株式会社インターネットイニシアティブ
飛行誘導装置および飛行誘導方法
10日前
三機工業株式会社
遠隔監視システム、データ収集装置、プログラム、及び遠隔監視方法
3日前
オムロン株式会社
加熱炉、制御装置、制御プログラム、および制御方法
16日前
株式会社やまびこ
自律走行支援装置、作業車両の制御方法、プログラム及び作業車両
4日前
本田技研工業株式会社
移動体の制御装置、移動体の制御方法、およびプログラム
16日前
本田技研工業株式会社
移動体の制御装置、移動体の制御方法、およびプログラム
16日前
横河電機株式会社
制御機器、設定方法、設定プログラム、および情報処理装置
16日前
株式会社FUJI
ワーク加工装置、ワーク加工装置における搬送方法、及び搬送プログラム
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ