TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025067054
公報種別
公開特許公報(A)
公開日
2025-04-24
出願番号
2023176727
出願日
2023-10-12
発明の名称
情報処理システム、情報処理プログラム、及び情報処理方法
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
主分類
G05B
23/02 20060101AFI20250417BHJP(制御;調整)
要約
【課題】第1モデルデータの推定精度を適切に評価する。
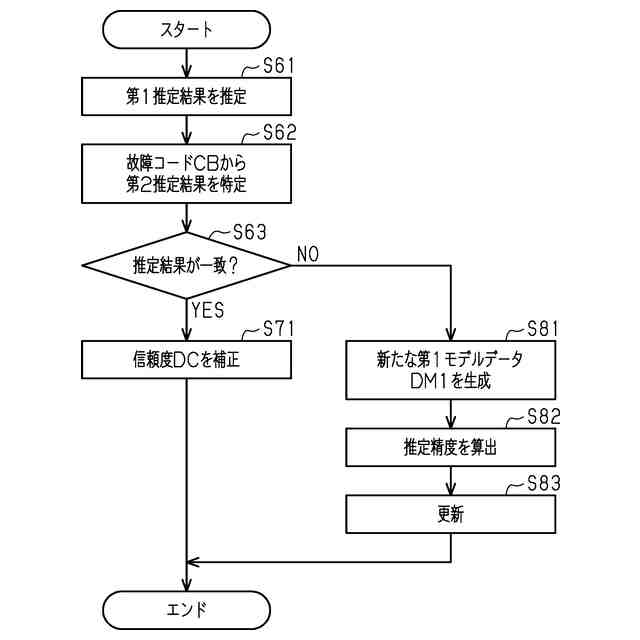
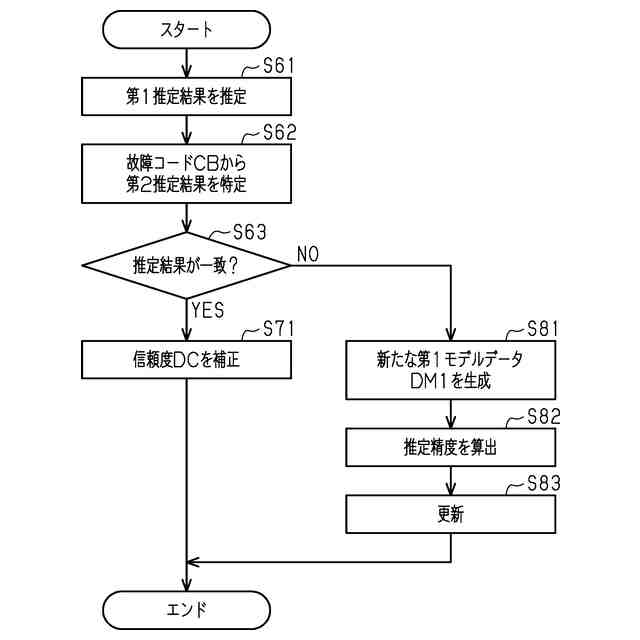
【解決手段】情報処理システムは、実行装置と、記憶装置とを備えている。記憶装置は、機械学習により予め生成されたモデルデータである第1モデルデータと、ルールベースにより予め生成されたモデルデータである第2モデルデータと、を記憶している。実行装置は、第1走行データを第1モデルデータに入力することにより出力した動力伝達装置の故障原因の推定結果である第1推定結果と、第2走行データを第2モデルデータに入力することにより出力した動力伝達装置の故障原因の推定結果である第2推定結果とが一致するか否かを判定する(S63)。実行装置は、第1推定結果及び第2推定結果が一致する場合に、第1モデルデータの信頼度を高くする(S71)。
【選択図】図3
特許請求の範囲
【請求項1】
実行装置と、記憶装置とを備え、
前記記憶装置は、
車両に搭載されたセンサによって取得された各種のデータである第1走行データ、及び当該第1走行データに紐づいた前記車両に搭載された動力伝達装置の故障原因の組み合わせ、を教師データとして、機械学習により予め生成されたモデルデータである第1モデルデータと、
前記車両に搭載されたセンサによって取得された各種のデータである第2走行データ、及び当該第2走行データに紐づいた前記動力伝達装置の故障原因の組み合わせ、のルールベースにより予め生成されたモデルデータである第2モデルデータと、
を記憶しており、
前記第1モデルデータは、前記第1走行データが入力されることにより前記動力伝達装置の故障原因の推定結果である第1推定結果を出力可能であり、
前記第2モデルデータは、前記第2走行データが入力されることにより前記動力伝達装置の故障原因の推定結果である第2推定結果を出力可能であり、
前記実行装置は、
前記第1走行データを取得することと、
取得した前記第1走行データを前記第1モデルデータに入力することにより前記第1推定結果を出力することと、
前記第2走行データを取得することと、
取得した前記第2走行データを前記第2モデルデータに入力することにより前記第2推定結果を出力することと、
出力した前記第1推定結果及び前記第2推定結果が一致する場合に、前記第1モデルデータの信頼度を高くすることと、
を実行する
情報処理システム。
続きを表示(約 1,800 文字)
【請求項2】
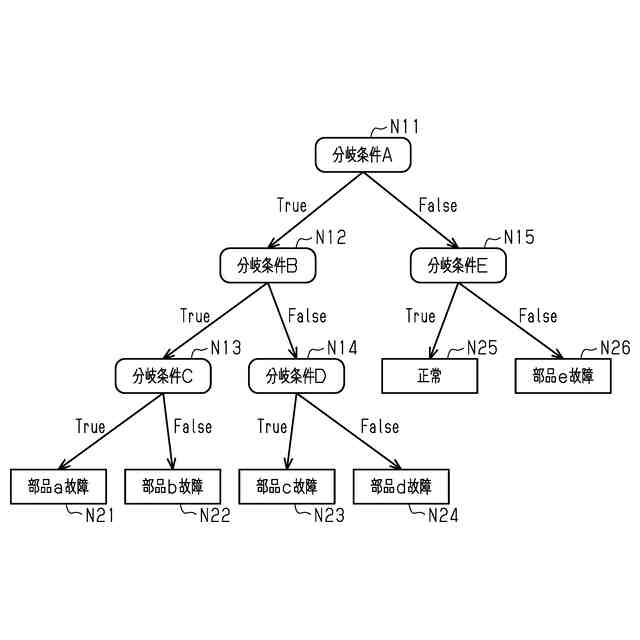
前記第1モデルデータは、決定木を用いたモデルデータであり、
前記実行装置は、
出力した前記第1推定結果及び前記第2推定結果が一致しない場合に、前記第1モデルデータが含む複数のノードのうち、ルートノードから前記第1推定結果を示すリーフノードまでのノードについて予め規定された分岐条件を、前記リーフノードとは異なるリーフノードへと導く可能性が高くなるように補正すること、
を実行する
請求項1に記載の情報処理システム。
【請求項3】
前記第1走行データは、
前記車両の運転者が操作するアクセルペダルの操作量、前記車両の速度、及び前記動力伝達装置を循環するオイルの温度についての予め定められた規定タイミングのデータと、
前記動力伝達装置を循環するオイルの圧力についての前記規定タイミングを含む時系列データと、を備えている
請求項1又は請求項2に記載の情報処理システム。
【請求項4】
実行装置と、記憶装置とを備える情報処理システムを対象とし、
前記記憶装置は、
車両に搭載されたセンサによって取得された各種のデータである第1走行データ、及び当該第1走行データに紐づいた前記車両に搭載された動力伝達装置の故障原因の組み合わせ、を教師データとして、機械学習により予め生成されたモデルデータである第1モデルデータと、
前記車両に搭載されたセンサによって取得された各種のデータである第2走行データ、及び当該第2走行データに紐づいた前記動力伝達装置の故障原因の組み合わせ、のルールベースにより予め生成されたモデルデータである第2モデルデータと、
を記憶しており、
前記第1モデルデータは、前記第1走行データが入力されることにより前記動力伝達装置の故障原因の推定結果である第1推定結果を出力可能であり、
前記第2モデルデータは、前記第2走行データが入力されることにより前記動力伝達装置の故障原因の推定結果である第2推定結果を出力可能であり、
前記実行装置に、
前記第1走行データを取得することと、
取得した前記第1走行データを前記第1モデルデータに入力することにより前記第1推定結果を出力することと、
前記第2走行データを取得することと、
取得した前記第2走行データを前記第2モデルデータに入力することにより前記第2推定結果を出力することと、
出力した前記第1推定結果及び前記第2推定結果が一致する場合に、前記第1モデルデータの信頼度を高くすることと、
を実行させる
情報処理プログラム。
【請求項5】
実行装置と、記憶装置とを備える情報処理システムを対象とし、
前記記憶装置は、
車両に搭載されたセンサによって取得された各種のデータである第1走行データ、及び当該第1走行データに紐づいた前記車両に搭載された動力伝達装置の故障原因の組み合わせ、を教師データとして、機械学習により予め生成されたモデルデータである第1モデルデータと、
前記車両に搭載されたセンサによって取得された各種のデータである第2走行データ、及び当該第2走行データに紐づいた前記動力伝達装置の故障原因の組み合わせ、のルールベースにより予め生成されたモデルデータである第2モデルデータと、
を記憶しており、
前記第1モデルデータは、前記第1走行データが入力されることにより前記動力伝達装置の故障原因の推定結果である第1推定結果を出力可能であり、
前記第2モデルデータは、前記第2走行データが入力されることにより前記動力伝達装置の故障原因の推定結果である第2推定結果を出力可能であり、
前記実行装置が、
前記第1走行データを取得することと、
取得した前記第1走行データを前記第1モデルデータに入力することにより前記第1推定結果を出力することと、
前記第2走行データを取得することと、
取得した前記第2走行データを前記第2モデルデータに入力することにより前記第2推定結果を出力することと、
出力した前記第1推定結果及び前記第2推定結果が一致する場合に、前記第1モデルデータの信頼度を高くすることと、
を実行する
情報処理方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、情報処理システム、情報処理プログラム、及び情報処理方法に関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
特許文献1の故障分析支援装置は、実行装置と、記憶装置とを備えている。記憶装置は、決定木を用いたモデルデータを記憶している。すなわち、このモデルデータは、複数のノード及び複数のリーフノードから構成された木構造のモデルのデータである。モデルデータは、各ノードについて予め定められた分岐条件に応じた分岐を繰り返すことで末端のリーフノードに導く。リーフノードは、プラントなどの設備についての故障原因を示している。実行装置は、発生している故障内容等の情報の入力を受け付ける。そして、実行装置は、モデルデータを参照しつつ、上記の情報に基づいて設備についての故障原因を推定する。
【先行技術文献】
【特許文献】
【0003】
特開2020-140522号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1が開示する技術のように、モデルデータを用いて設備等の故障原因を推定するにあたっては、そのモデルデータによる故障原因の推定精度を評価したい場合がある。しかし、特許文献1は、推定精度をどのように評価するのかについて何ら言及していない。
【課題を解決するための手段】
【0005】
上記課題を解決するための情報処理システムは、実行装置と、記憶装置とを備え、前記記憶装置は、車両に搭載されたセンサによって取得された各種のデータである第1走行データ、及び当該第1走行データに紐づいた前記車両に搭載された動力伝達装置の故障原因の組み合わせ、を教師データとして、機械学習により予め生成されたモデルデータである第1モデルデータと、前記車両に搭載されたセンサによって取得された各種のデータである第2走行データ、及び当該第2走行データに紐づいた前記動力伝達装置の故障原因の組み合わせ、のルールベースにより予め生成されたモデルデータである第2モデルデータと、を記憶しており、前記第1モデルデータは、前記第1走行データが入力されることにより前記動力伝達装置の故障原因の推定結果である第1推定結果を出力可能であり、前記第2モデルデータは、前記第2走行データが入力されることにより前記動力伝達装置の故障原因の推定結果である第2推定結果を出力可能であり、前記実行装置は、前記第1走行データを取得することと、取得した前記第1走行データを前記第1モデルデータに入力することにより前記第1推定結果を出力することと、前記第2走行データを取得することと、取得した前記第2走行データを前記第2モデルデータに入力することにより前記第2推定結果を出力することと、出力した前記第1推定結果及び前記第2推定結果が一致する場合に、前記第1モデルデータの信頼度を高くすることと、を実行する。
【0006】
上記課題を解決するための情報処理プログラムは、実行装置と、記憶装置とを備える情報処理システムを対象とし、前記記憶装置は、車両に搭載されたセンサによって取得された各種のデータである第1走行データ、及び当該第1走行データに紐づいた前記車両に搭載された動力伝達装置の故障原因の組み合わせ、を教師データとして、機械学習により予め生成されたモデルデータである第1モデルデータと、前記車両に搭載されたセンサによって取得された各種のデータである第2走行データ、及び当該第2走行データに紐づいた前記動力伝達装置の故障原因の組み合わせ、のルールベースにより予め生成されたモデルデータである第2モデルデータと、を記憶しており、前記第1モデルデータは、前記第1走行データが入力されることにより前記動力伝達装置の故障原因の推定結果である第1推定結果を出力可能であり、前記第2モデルデータは、前記第2走行データが入力されることにより前記動力伝達装置の故障原因の推定結果である第2推定結果を出力可能であり、前記実行装置に、前記第1走行データを取得することと、取得した前記第1走行データを前記第1モデルデータに入力することにより前記第1推定結果を出力することと、前記第2走行データを取得することと、取得した前記第2走行データを前記第2モデルデータに入力することにより前記第2推定結果を出力することと、出力した前記第1推定結果及び前記第2推定結果が一致する場合に、前記第1モデルデータの信頼度を高くすることと、を実行させる。
【0007】
上記課題を解決するための情報処理方法は、実行装置と、記憶装置とを備える情報処理システムを対象とし、前記記憶装置は、車両に搭載されたセンサによって取得された各種のデータである第1走行データ、及び当該第1走行データに紐づいた前記車両に搭載された動力伝達装置の故障原因の組み合わせ、を教師データとして、機械学習により予め生成されたモデルデータである第1モデルデータと、前記車両に搭載されたセンサによって取得された各種のデータである第2走行データ、及び当該第2走行データに紐づいた前記動力伝達装置の故障原因の組み合わせ、のルールベースにより予め生成されたモデルデータである第2モデルデータと、を記憶しており、前記第1モデルデータは、前記第1走行データが入力されることにより前記動力伝達装置の故障原因の推定結果である第1推定結果を出力可能であり、前記第2モデルデータは、前記第2走行データが入力されることにより前記動力伝達装置の故障原因の推定結果である第2推定結果を出力可能であり、前記実行装置が、前記第1走行データを取得することと、取得した前記第1走行データを前記第1モデルデータに入力することにより前記第1推定結果を出力することと、前記第2走行データを取得することと、取得した前記第2走行データを前記第2モデルデータに入力することにより前記第2推定結果を出力することと、出力した前記第1推定結果及び前記第2推定結果が一致する場合に、前記第1モデルデータの信頼度を高くすることと、を実行する。
【発明の効果】
【0008】
上記構成によれば、第1推定結果及び第2推定結果が一致、すなわち第1モデルデータによる推定結果が正しいと判断できる状況において、第1モデルデータの信頼度が高くなる。このように、第1モデルデータによる第1推定結果と、第1モデルデータとは別の第2モデルデータによる第2推定結果とを比較することで、第1モデルデータの推定精度を評価するための信頼度を得られる。これにより、第1モデルデータの推定精度を適切に評価できる。
【図面の簡単な説明】
【0009】
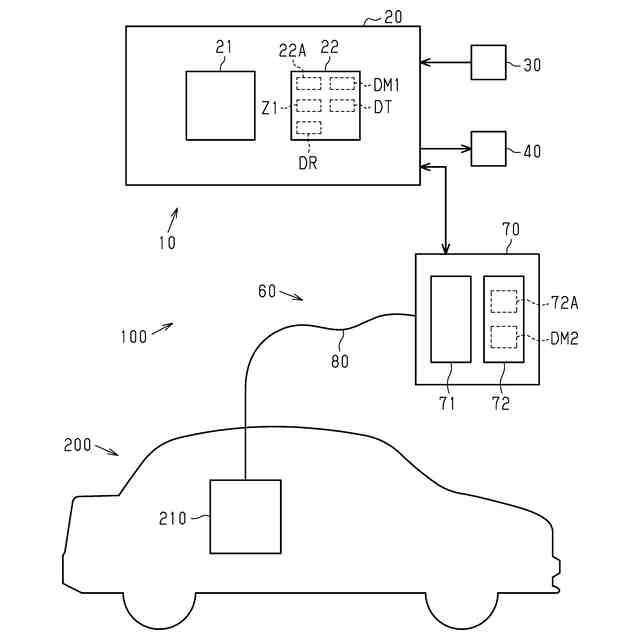
図1は、情報処理システム及び車両の概略構成図である。
図2は、第1モデルデータの説明図である。
図3は、信頼度出力制御を示すフローチャートである。
【発明を実施するための形態】
【0010】
<車両の概略構成>
以下、本発明の一実施形態を図1~図3にしたがって説明する。先ず、情報処理システム100が対象とする車両200について説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電圧回路
17日前
和研工業株式会社
多連レバー機構
1か月前
株式会社クボタ
作業車
20日前
株式会社ダイフク
搬送車
20日前
ローム株式会社
半導体集積回路
25日前
エイブリック株式会社
ボルテージレギュレータ
17日前
トヨタ自動車株式会社
工作機械の制御装置
18日前
トヨタ自動車株式会社
工作機械の制御装置
19日前
愛知機械テクノシステム株式会社
無人搬送車
1か月前
株式会社ダイフク
物品搬送設備
18日前
株式会社やまびこ
走行制御装置
5日前
アズビル株式会社
制御システムおよび制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
日本精工株式会社
制御装置および制御方法
1か月前
株式会社ダイヘン
搬送車
17日前
株式会社ダイヘン
搬送車
17日前
株式会社ダイヘン
搬送車
17日前
株式会社ダイヘン
搬送車
17日前
チームラボ株式会社
走行システム及び走行路
1か月前
トヨタ自動車株式会社
群制御システム及び群制御方法
1か月前
株式会社デンソー
診断装置
3日前
井関農機株式会社
作業車両
13日前
村田機械株式会社
稼働監視システム及び稼働監視方法
1か月前
ミツミ電機株式会社
多方向入力装置
23日前
オルガノ株式会社
運転管理方法及び運転管理装置
20日前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
23日前
ミツミ電機株式会社
多方向入力装置
23日前
ミツミ電機株式会社
多方向入力装置
23日前
ミツミ電機株式会社
多方向入力装置
23日前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ローム株式会社
バイアス回路
19日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ


































