TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025061770
公報種別
公開特許公報(A)
公開日
2025-04-11
出願番号
2025009912,2022572870
出願日
2025-01-23,2021-01-01
発明の名称
飛行体の制御方法
出願人
株式会社エアロネクスト
代理人
主分類
G05D
1/49 20240101AFI20250403BHJP(制御;調整)
要約
【課題】を提供すること。
【解決手段】 所定の情報に基づいて、直前の状態よりも飛行効率が上がる方向を向くように前記飛行体の機体方向を制御する方法を提供する。かかる構成によれば指向性を持つ飛行体が、積極的に揚力を利用したり、抗力を減少させたりといった効果を発揮するために、飛行中の相対風向風速に対して好適な姿勢で飛行可能な飛行制御方法を提供すること。かかる構成によれば、風向きと機体方向を調整することにより最適な飛行姿勢を得ることができ、燃費が向上しつつ安全性を高めることができる。
【選択図】図5
特許請求の範囲
【請求項1】
所定の情報に基づいて、直前の状態よりも飛行効率が上がる方向を向くように前記飛行体の機体方向を制御する、
飛行体の制御方法。
続きを表示(約 1,000 文字)
【請求項2】
請求項1に記載の飛行体の制御方法であって、
前記飛行体は進行方向に飛行するものであり、
前記進行方向に関わらず、前記飛行体の機体方向を制御する、
飛行体の制御方法。
【請求項3】
請求項1又は請求項2のいずれかに記載の飛行体の制御方法であって、
前記飛行効率が上がる方向は、前記飛行体の機体に関して予め設定された設定方向であり、
前記機体方向を前記設定方向となるように制御する、
飛行体の制御方法。
【請求項4】
請求項3に記載の飛行体の制御方法であって、
前記設定方向は、前記飛行体に対して所定方向から風を受けたときに飛行効率が最大化される方向である、
飛行体の制御方法。
【請求項5】
請求項4に記載の飛行体の制御方法であって、
前記設定方向は、前記風に対して前記飛行体の機体前部を正対させたときに飛行効率が最大化される方向である、
飛行体の制御方法。
【請求項6】
請求項1に記載の飛行体の制御方法であって、
飛行体が影響を受ける風の情報に基づいて、前記機体方向を制御する、
飛行体の制御方法。
【請求項7】
請求項6に記載の飛行体の制御方法であって、
前記飛行体への相対風向を取得する取得し、
取得した前記相対風向に基づいて前記機体方向を制御する、
飛行体の制御方法。
【請求項8】
請求項6に記載の飛行体の制御方法であって、
前記飛行体への相対風向及び相対風速を取得し、
取得した前記相対風速及び前記相対風向に基づいて前記機体方向を制御する、
飛行体の制御方法。
【請求項9】
請求項5に記載の飛行体の制御方法であって、
飛行体が影響を受ける風の情報は、前記飛行体の進行方向の速度と、飛行体周囲の風向又は風速の少なくともいずれか一方と、の双方に基づいて算出される情報である、
飛行体の制御方法。
【請求項10】
請求項5乃至請求項8のいずれかに記載の飛行体の制御方法であって、
前記飛行体は風向計を備えており、
前記風向計から取得した風向に応じて前記機体方向を制御する、
飛行体の制御方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、飛行体の制御飛行方法に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
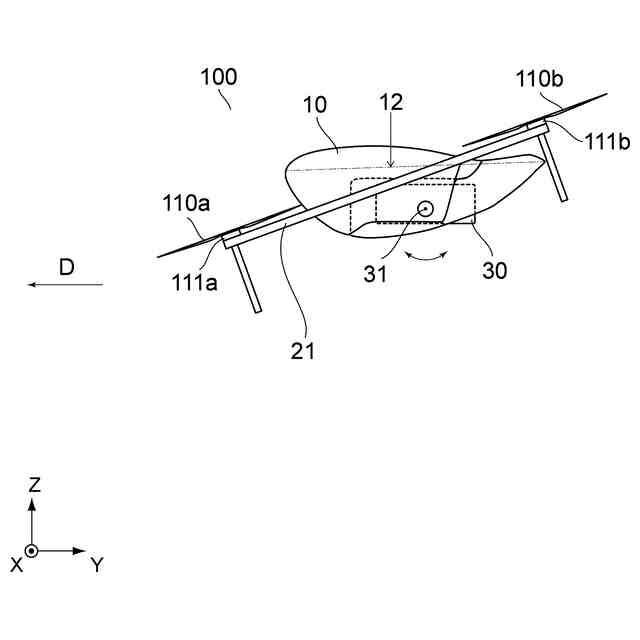
近年、ドローン(Drone)や無人航空機(UAV:Unmanned Aerial Vehicle)などの飛行体(以下、「飛行体」と総称する)を用いたサービスの実用化に向けた研究や実証実験が進められている。一般的にマルチコプターと呼ばれる、固定ピッチプロペラを複数備え、機体を傾けることで移動を行う飛行体(以下、マルチコプターと総称する)は、一般的な固定翼機のように離着陸用の滑走路を必要としないため、比較的狭い土地での運用が可能となり、宅配や救助など行う場合に、好適である。
【0003】
しかし、マルチコプターの機体形状は、主翼の生む揚力を用いて飛行する一般的な固定翼機等に比べて燃費が劣る他、本体部によって生まれる抗力が考慮されていない。このような状況を鑑みて、特許文献1においては、回転翼の負荷を軽減する飛行体が開示されている。(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
米国特許出願公開第2020/0001995号
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1では、回転翼の回転軸と、本体部の基準平面の法線との間の角度を5から30度の間とすることで、本発明の回転翼航空機が前進するときに正の迎角を形成し、本体部が生む揚力により、回転翼の負荷を軽減し、飛行可能時間の向上を目的とする機体(以下、従来機体と総称する)が開発されている。
【0006】
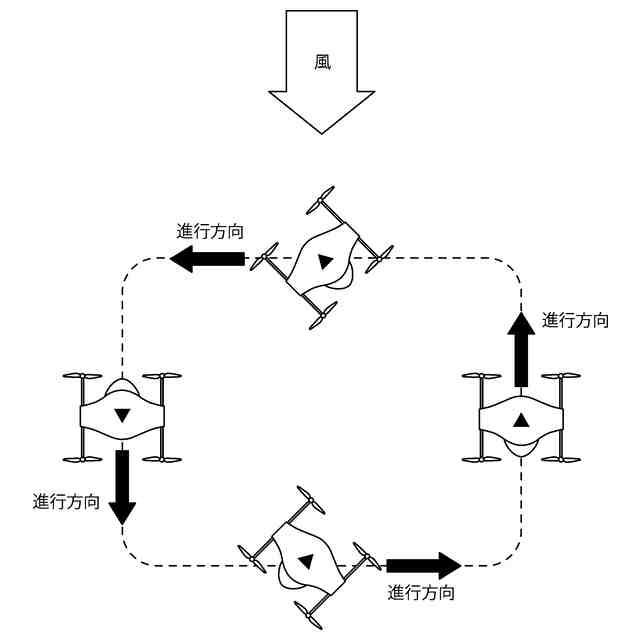
マルチコプターは、空中に留まっている間は常にエネルギーを消費し続ける。従来機体はエネルギー消費を軽減し、飛行可能時間を向上させる。この効果は、指向性のある飛行体が風に対して適切な角度で対峙して飛行することで発揮されるものであるが、マルチコプターは、固定翼機のように常に風に正対する飛行方法を取らずとも飛行することが可能であるため、非効率となる角度で飛行を行い、効果を発揮できないもしくは、エネルギー消費が増加してしまう可能性がある。
【0007】
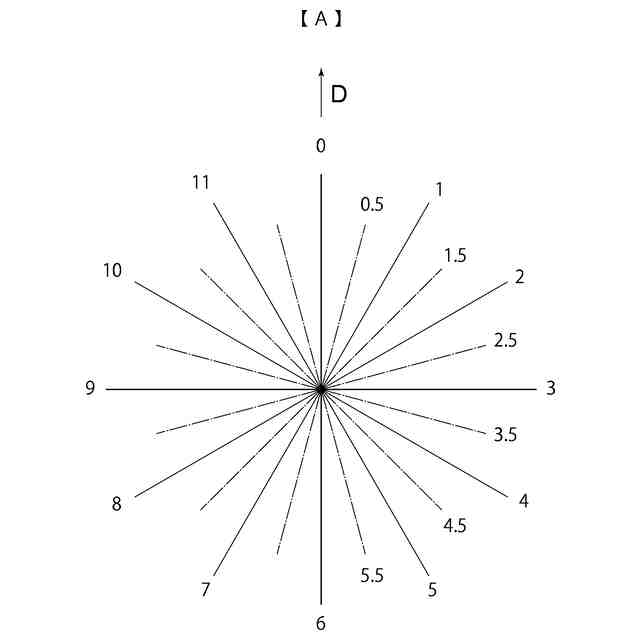
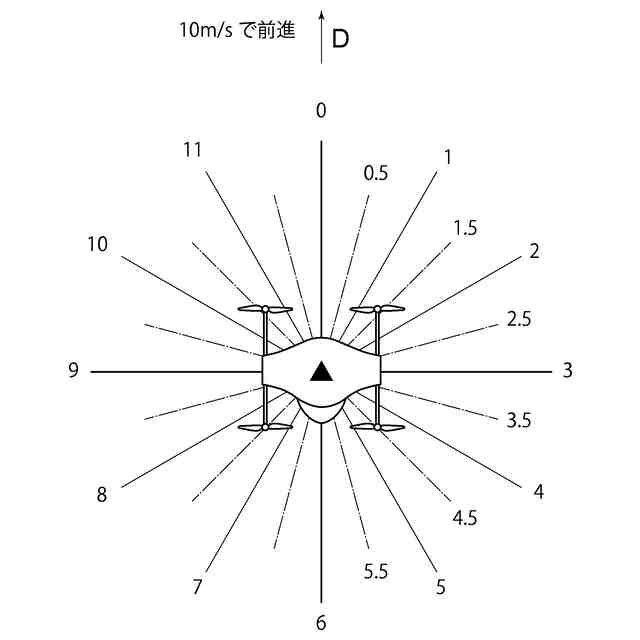
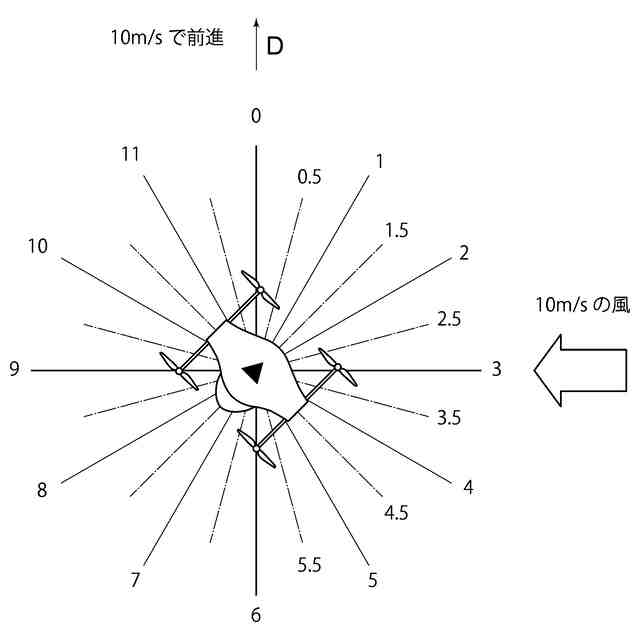
また、屋外での飛行を行う場合には、飛行体が進むことにより受ける風以外に、様々な方向から風を受けることとなる。例えば、無風時と強い横風を受ける時とでは、同速度で同方向に進む場合であっても、飛行体が機首を向けるべき方向が異なることは明らかである。
【0008】
そこで、本発明は、指向性を持つ飛行体が、積極的に揚力を利用したり、抗力を減少させたりといった効果を発揮するために、飛行中の相対風向風速に対して好適な姿勢で飛行可能な飛行制御方法を提供することを一つの目的とする。
【課題を解決するための手段】
【0009】
本発明によれば、所定の情報に基づいて、直前の状態よりも飛行効率が上がる方向を向くように前記飛行体の機体方向を制御する、飛行体の制御方法を提供することができる。
【発明の効果】
【0010】
本発明によれば、飛行体の飛行効率向上する飛行方法を提供し得る。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電圧回路
28日前
和研工業株式会社
多連レバー機構
1か月前
スター精密株式会社
工作機械
1か月前
株式会社クボタ
作業車
1か月前
ローム株式会社
半導体集積回路
1か月前
株式会社ダイフク
搬送車
1か月前
エイブリック株式会社
ボルテージレギュレータ
28日前
トヨタ自動車株式会社
工作機械の制御装置
29日前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
株式会社やまびこ
走行制御装置
16日前
株式会社ダイフク
物品搬送設備
29日前
愛知機械テクノシステム株式会社
無人搬送車
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
株式会社タブチ
減圧弁
10日前
アズビル株式会社
制御システムおよび制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
日本精工株式会社
制御装置および制御方法
1か月前
チームラボ株式会社
走行システム及び走行路
1か月前
日本信号株式会社
自走式装置
今日
株式会社ダイヘン
搬送車
28日前
株式会社ダイヘン
搬送車
28日前
株式会社ダイヘン
搬送車
28日前
株式会社ダイヘン
搬送車
28日前
トヨタ自動車株式会社
群制御システム及び群制御方法
1か月前
株式会社デンソー
診断装置
14日前
井関農機株式会社
作業車両
24日前
村田機械株式会社
稼働監視システム及び稼働監視方法
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ローム株式会社
バイアス回路
1か月前
オルガノ株式会社
運転管理方法及び運転管理装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
株式会社アイシン
自律移動体
今日
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ


































