TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025059506
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2023169632
出願日
2023-09-29
発明の名称
移動体の制御装置、移動体の制御方法、およびプログラム
出願人
本田技研工業株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G05D
1/43 20240101AFI20250403BHJP(制御;調整)
要約
【課題】目的地に向けた経路を生成する際に、ロボットの向き付けに関して非効率的な経路が生成されることを抑制すること。
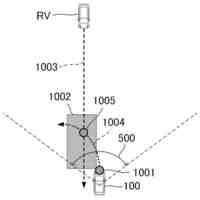
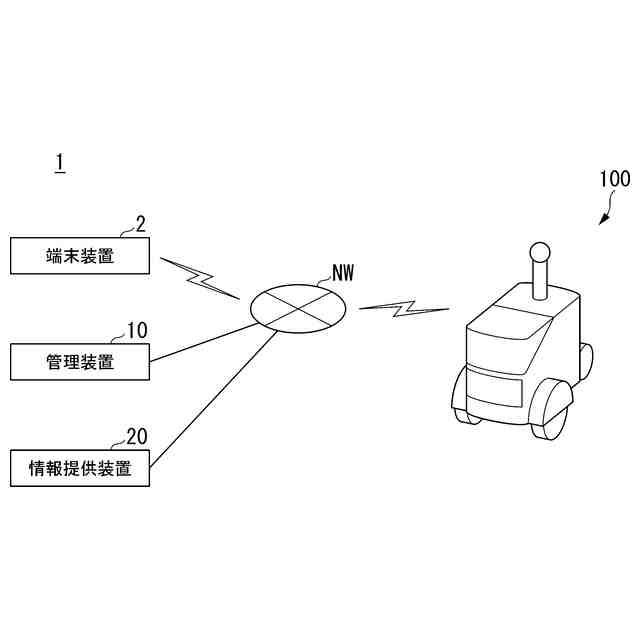
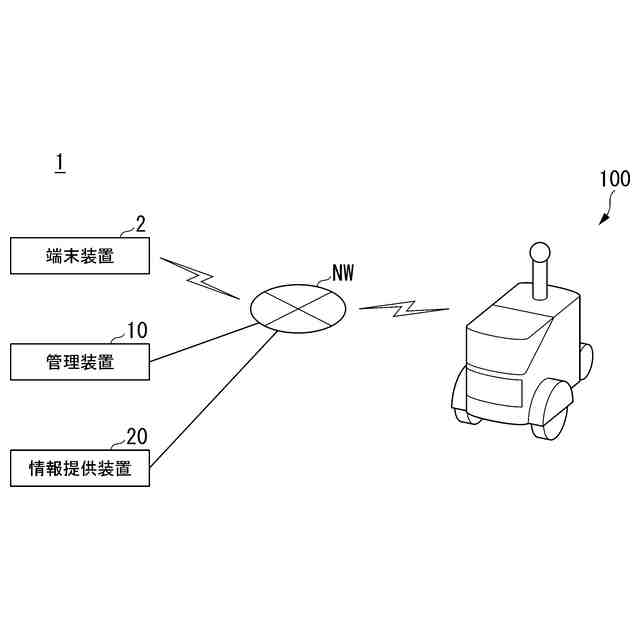
【解決手段】移動体の周辺状況が撮像された画像に少なくとも基づいて、前記移動体の周辺状況を認識する認識部と、認識された前記周辺状況と、設定された目的地とに基づいて、前記移動体から前記目的地までの経路を生成する生成部と、生成された前記経路が、前記移動体の現在位置と前記目的地とによって規定される所定領域内にあるか否かを判定する判定部と、生成された前記経路に沿って前記目的地まで前記移動体が移動するように前記移動体を制御する制御部と、を備え、前記制御部は、前記経路が前記所定領域から逸脱すると判定された場合、前記移動体をその場旋回させ、前記生成部は、その場旋回した前記移動体から前記目的地までの経路を再生成する、移動体の制御装置。
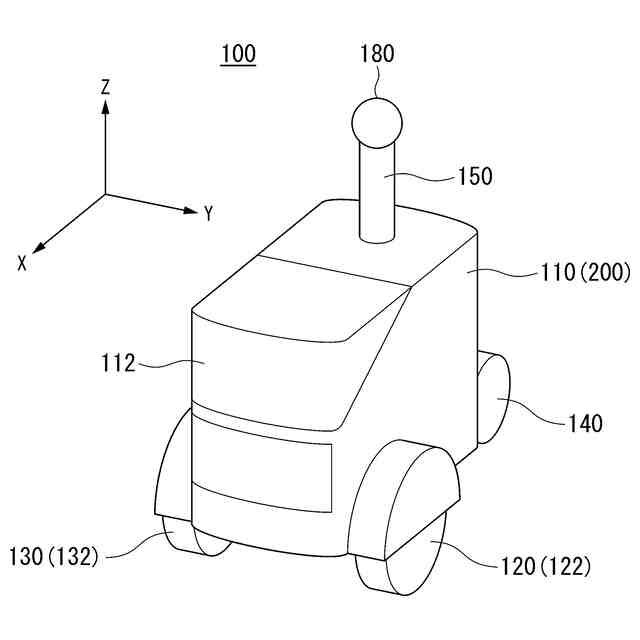
【選択図】図1
特許請求の範囲
【請求項1】
移動体の周辺状況が撮像された画像に少なくとも基づいて、前記移動体の周辺状況を認識する認識部と、
認識された前記周辺状況と、設定された目的地とに基づいて、前記移動体から前記目的地までの経路を生成する生成部と、
生成された前記経路が、前記移動体の現在位置と前記目的地とによって規定される所定領域内にあるか否かを判定する判定部と、
生成された前記経路に沿って前記目的地まで前記移動体が移動するように前記移動体を制御する制御部と、を備え、
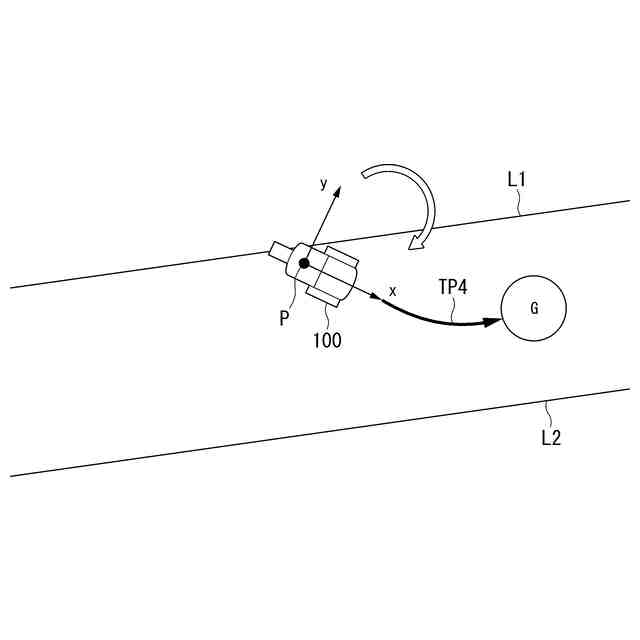
前記制御部は、前記経路が前記所定領域から逸脱すると判定された場合、前記移動体をその場旋回させ、前記生成部は、その場旋回した前記移動体から前記目的地までの経路を再生成する、
移動体の制御装置。
続きを表示(約 1,500 文字)
【請求項2】
前記判定部は、再生成された前記経路が前記所定領域内にあるか否かを判定し、
前記制御部は、再生成された前記経路が前記所定領域内にあると判定された場合、再生成された前記経路に沿って前記目的地まで前記移動体が移動するように前記移動体を制御する、
請求項1に記載の移動体の制御装置。
【請求項3】
前記判定部は、再生成された前記経路が前記所定領域内にあるか否かを判定し、
前記制御部は、再生成された前記経路が前記所定領域内から逸脱すると判定された場合、前記移動体を再生成された前記経路に沿って前記所定領域の境界付近に移動するように前記移動体を制御し、前記所定領域の境界付近において前記移動体をその場旋回させ、前記生成部は、その場旋回した前記移動体から前記目的地までの経路を生成する、
請求項1に記載の移動体の制御装置。
【請求項4】
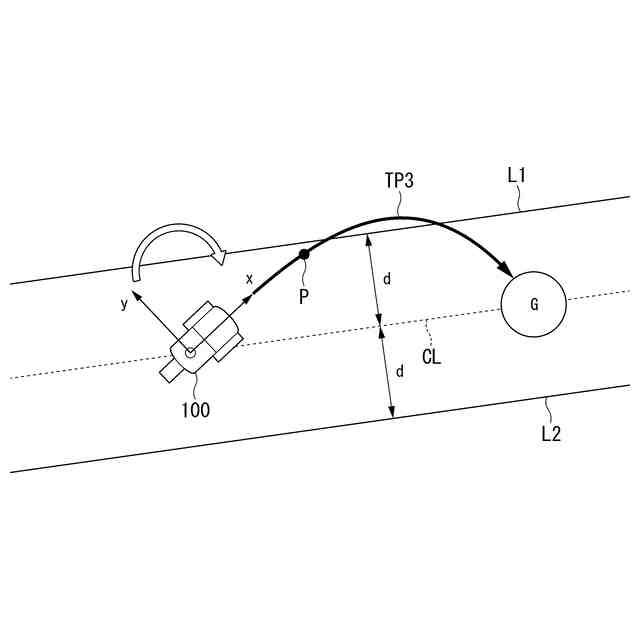
前記所定領域は、前記移動体の現在位置と前記目的地とを結ぶ基準線からの距離が所定距離以内の範囲を表す領域である、
請求項1に記載の移動体の制御装置。
【請求項5】
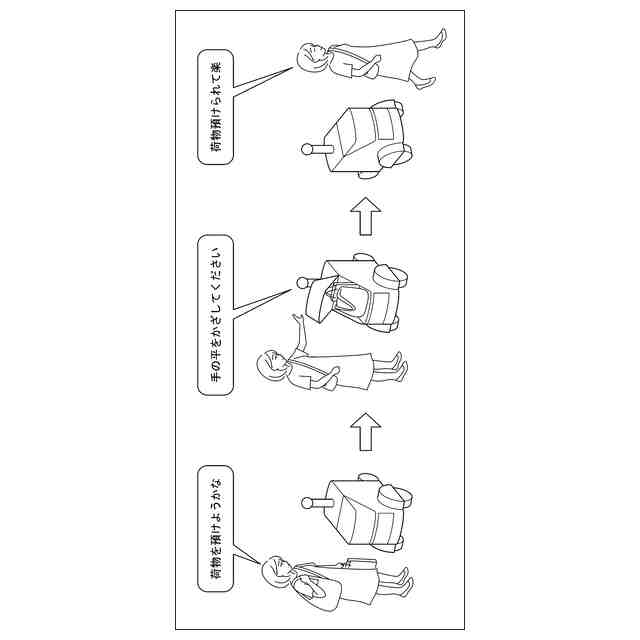
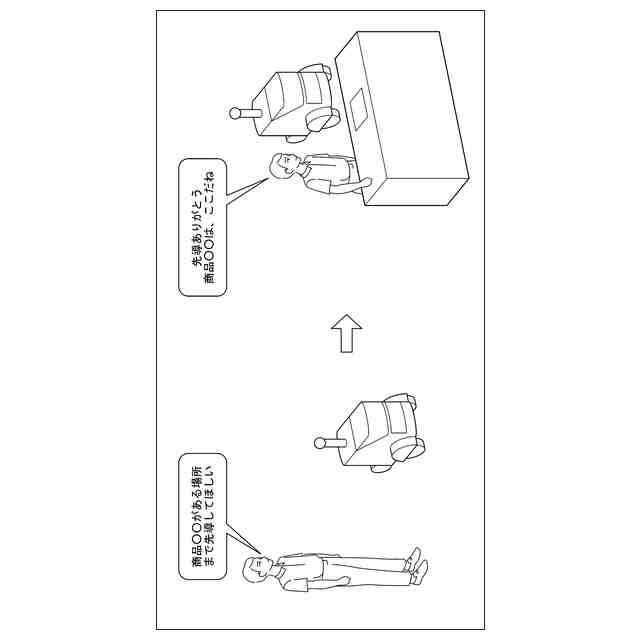
前記移動体は、ユーザを追従するように移動する追従モードと、前記ユーザの前を前記ユーザの移動速度に合わせて移動する誘導モードとのいずれかのモードにおいて動作する、
請求項1に記載の移動体の制御装置。
【請求項6】
前記移動体が前記追従モードにおいて動作する場合、前記目的地は前記ユーザ又は前記ユーザから所定範囲内の地点である、
請求項5に記載の移動体の制御装置。
【請求項7】
前記移動体が前記誘導モードにおいて動作する場合、前記目的地は前記ユーザによって設定された地点、または前記ユーザの前方の所定範囲内の地点である、
請求項5に記載の移動体の制御装置。
【請求項8】
前記移動体が前記誘導モードにおいて動作する場合、前記目的地は、前記ユーザによって設定された最終地点に到達するために暫定的に設定された暫定地点である、
請求項5に記載の移動体の制御装置。
【請求項9】
コンピュータが、
移動体の周辺状況が撮像された画像に少なくとも基づいて、前記移動体の周辺状況を認識し、
認識された前記周辺状況と、設定された目的地とに基づいて、前記移動体から前記目的地までの経路を生成し、
生成された前記経路が、前記移動体の現在位置と前記目的地とによって規定される所定領域内にあるか否かを判定し、
生成された前記経路に沿って前記目的地まで前記移動体が移動するように前記移動体を制御し、
前記経路が前記所定領域から逸脱すると判定された場合、前記移動体をその場旋回させ、その場旋回した前記移動体から前記目的地までの経路を再生成する、
移動体の制御方法。
【請求項10】
コンピュータに、
移動体の周辺状況が撮像された画像に少なくとも基づいて、前記移動体の周辺状況を認識させ、
認識された前記周辺状況と、設定された目的地とに基づいて、前記移動体から前記目的地までの経路を生成させ、
生成された前記経路が、前記移動体の現在位置と前記目的地とによって規定される所定領域内にあるか否かを判定させ、
生成された前記経路に沿って前記目的地まで前記移動体が移動するように前記移動体を制御させ、
前記経路が前記所定領域から逸脱すると判定された場合、前記移動体をその場旋回させ、その場旋回した前記移動体から前記目的地までの経路を再生成させる、
プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動体の制御装置、移動体の制御方法、およびプログラムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来、ユーザを所望の場所に案内したり、荷物を搬送したりするロボットが知られている(例えば、特許文献1参照)。上記のロボットは、最大移動速度と、環境内の各エリアのそれぞれとを対応づけた移動速度データベースを参照して、設定した最大移動速度を上限とした移動速度となるように移動するものである。
【先行技術文献】
【特許文献】
【0003】
特開2012-111011号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来技術のロボットは、目的地に向けた経路を生成する際に、当該ロボットの向き付けを変更することなく非効率的な経路を生成する場合があった。
【0005】
本発明は、このような事情を考慮してなされたものであり、目的地に向けた経路を生成する際に、ロボットの向き付けに関して非効率的な経路が生成されることを抑制することができる移動体の制御装置、移動体の制御方法、およびプログラムを提供することを目的の一つとする。
【課題を解決するための手段】
【0006】
この発明に係る移動体の制御装置、移動体の制御方法、およびプログラムは、以下の構成を採用した。
(1):この発明の一態様に係る移動体の制御装置は、移動体の周辺状況が撮像された画像に少なくとも基づいて、前記移動体の周辺状況を認識する認識部と、認識された前記周辺状況と、設定された目的地とに基づいて、前記移動体から前記目的地までの経路を生成する生成部と、生成された前記経路が、前記移動体の現在位置と前記目的地とによって規定される所定領域内にあるか否かを判定する判定部と、生成された前記経路に沿って前記目的地まで前記移動体が移動するように前記移動体を制御する制御部と、を備え、前記制御部は、前記経路が前記所定領域から逸脱すると判定された場合、前記移動体をその場旋回させ、前記生成部は、その場旋回した前記移動体から前記目的地までの経路を再生成するものである。
【0007】
(2):上記(1)の態様において、前記判定部は、再生成された前記経路が前記所定領域内にあるか否かを判定し、前記制御部は、再生成された前記経路が前記所定領域内にあると判定された場合、再生成された前記経路に沿って前記目的地まで前記移動体が移動するように前記移動体を制御するものである。
【0008】
(3):上記(1)の態様において、前記判定部は、再生成された前記経路が前記所定領域内にあるか否かを判定し、前記制御部は、再生成された前記経路が前記所定領域内から逸脱すると判定された場合、前記移動体を再生成された前記経路に沿って前記所定領域の境界付近に移動するように前記移動体を制御し、前記所定領域の境界付近において前記移動体をその場旋回させ、前記生成部は、その場旋回した前記移動体から前記目的地までの経路を生成するものである。
【0009】
(4):上記(1)の態様において、前記所定領域は、前記移動体の現在位置と前記目的地とを結ぶ基準線からの距離が所定距離以内の範囲を表す領域であるものである。
【0010】
(5):上記(1)の態様において、前記移動体は、ユーザを追従するように移動する追従モードと、前記ユーザの前を前記ユーザの移動速度に合わせて移動する誘導モードとのいずれかのモードにおいて動作するものである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
本田技研工業株式会社
電動車両
5日前
本田技研工業株式会社
回転電機
1日前
本田技研工業株式会社
鞍乗り型車両
1日前
本田技研工業株式会社
鞍乗り型車両
5日前
本田技研工業株式会社
燃料製造システム
1日前
本田技研工業株式会社
運転支援装置及び運転支援方法
5日前
本田技研工業株式会社
運転支援装置及び運転支援方法
5日前
本田技研工業株式会社
コイル分離方法及びコイル分離装置
1日前
本田技研工業株式会社
行動確率推定装置及び交通安全支援システム
今日
本田技研工業株式会社
昇温システム
5日前
本田技研工業株式会社
昇温システム
5日前
本田技研工業株式会社
ロボット遠隔操作システム、ロボット遠隔操作方法、及びプログラム
1日前
本田技研工業株式会社
ロボット遠隔操作システム、ロボット遠隔操作方法、及びプログラム
1日前
本田技研工業株式会社
回転電機コアおよびこれを用いた回転電機ならびに回転電機コアの製造方法
1日前
本田技研工業株式会社
移動体の制御装置、移動体の制御方法、およびプログラム
5日前
エイブリック株式会社
基準電圧回路
5日前
和研工業株式会社
多連レバー機構
18日前
スター精密株式会社
工作機械
1か月前
株式会社クボタ
作業車
8日前
ローム株式会社
半導体集積回路
13日前
株式会社豊田自動織機
荷役車両
2か月前
株式会社ダイフク
搬送車
8日前
株式会社シンテックホズミ
搬送ロボット
1か月前
エイブリック株式会社
ボルテージレギュレータ
5日前
トヨタ自動車株式会社
工作機械の制御装置
6日前
トヨタ自動車株式会社
工作機械の制御装置
7日前
株式会社ダイフク
物品搬送設備
1か月前
国立大学法人広島大学
モデル誤差抑制補償器
1か月前
愛知機械テクノシステム株式会社
無人搬送車
27日前
株式会社ダイフク
物品搬送設備
6日前
アズビル株式会社
制御システムおよび制御方法
28日前
アズビル株式会社
制御システムおよび制御方法
19日前
アズビル株式会社
制御システムおよび制御方法
19日前
日本精工株式会社
制御装置および制御方法
25日前
トヨタ自動車株式会社
自律走行装置
1か月前
株式会社ダイヘン
搬送車
5日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ