TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025063363
公報種別
公開特許公報(A)
公開日
2025-04-16
出願番号
2023172461
出願日
2023-10-04
発明の名称
飛行誘導装置および飛行誘導方法
出願人
株式会社インターネットイニシアティブ
代理人
個人
,
個人
,
個人
,
個人
主分類
G05D
1/46 20240101AFI20250409BHJP(制御;調整)
要約
【課題】より確実に、飛行体を指定された無線通信方式の通信エリアへ飛行誘導することを目的とする。
【解決手段】
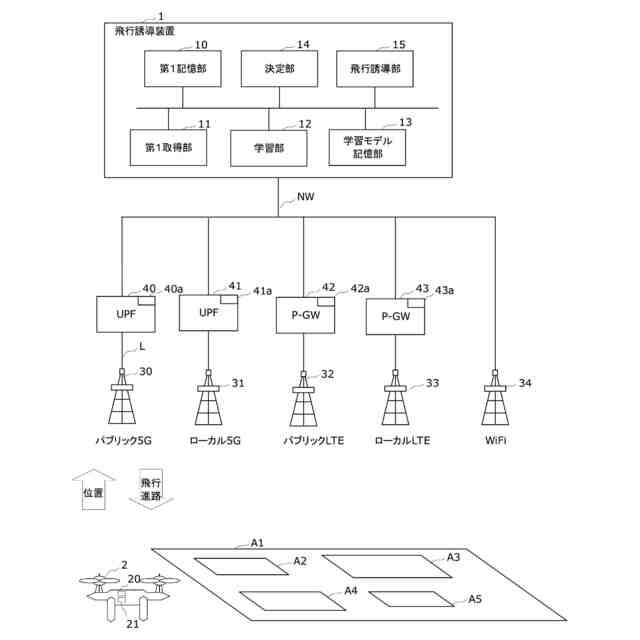
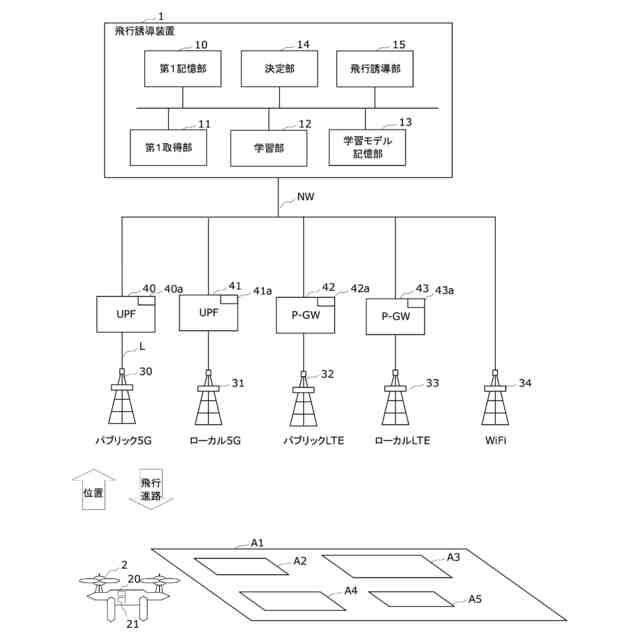
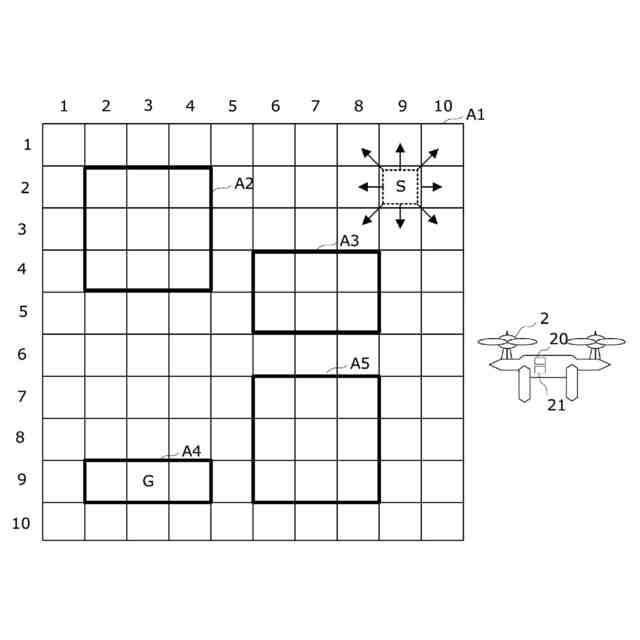
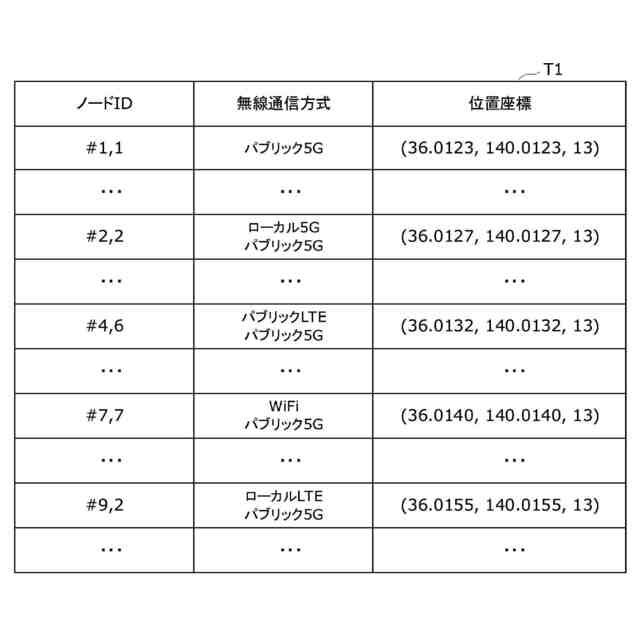
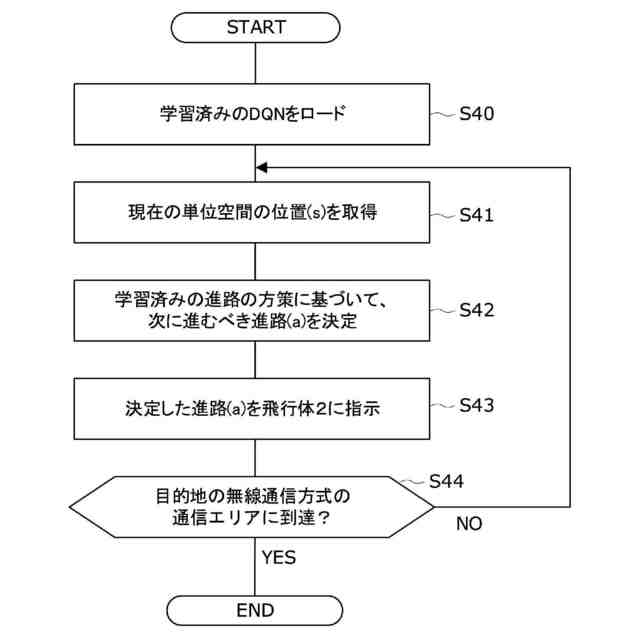
異種の無線通信方式の通信エリアA1~A5が重畳配置された飛行体2の移動空間において、初期地点の位置から指定された第1無線通信方式の通信エリアの位置までの飛行体2の進路を制御する飛行誘導装置1であって、移動空間を複数の空間に分割した単位空間の識別情報と、単位空間の位置と、単位空間をカバーする通信エリアの無線通信方式を示す情報とを関連付けて記憶する第1記憶部10と、飛行体2が現在いる単位空間の位置を飛行体2の現在の位置として取得する第1取得部11と、学習モデルを用いて学習された、飛行体2が各単位空間の位置から順次進むべき進路の方策に基づいて、第1取得部11によって取得された現在の単位空間の位置から、飛行体2が次に進むべき進路を決定する決定部14と、決定された飛行体2が次に進むべき進路を飛行体2に指示する飛行誘導部15とを備える。
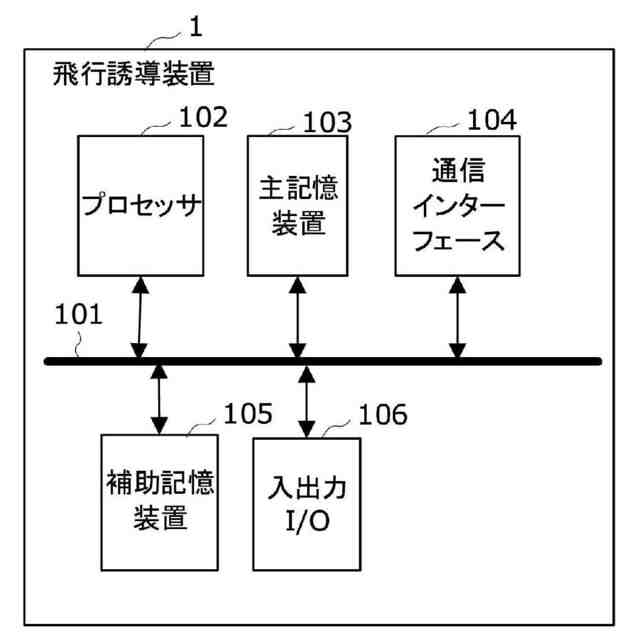
【選択図】図1
特許請求の範囲
【請求項1】
異種の無線通信方式の通信エリアが重畳配置された飛行体の移動空間において、初期地点の位置から、指定された第1無線通信方式の通信エリアの位置までの前記飛行体の進路を制御する飛行誘導装置であって、
前記移動空間を複数の空間に分割した単位空間の識別情報と、前記単位空間の位置と、前記単位空間をカバーする通信エリアの無線通信方式を示す情報とを関連付けて記憶するように構成された第1記憶部と、
前記飛行体が現在いる単位空間の位置を、前記飛行体の現在の位置として取得するように構成された第1取得部と、
学習モデルを用いて学習された、前記飛行体が各単位空間の位置から順次進むべき進路の方策に基づいて、前記第1取得部によって前記飛行体の前記現在の位置として取得された現在の単位空間の位置から、前記飛行体が次に進むべき進路を決定するように構成された決定部と、
前記決定部によって決定された、前記飛行体が次に進むべき進路を前記飛行体に指示するように構成された飛行誘導部と
を備える飛行誘導装置。
続きを表示(約 2,700 文字)
【請求項2】
請求項1に記載の飛行誘導装置において、
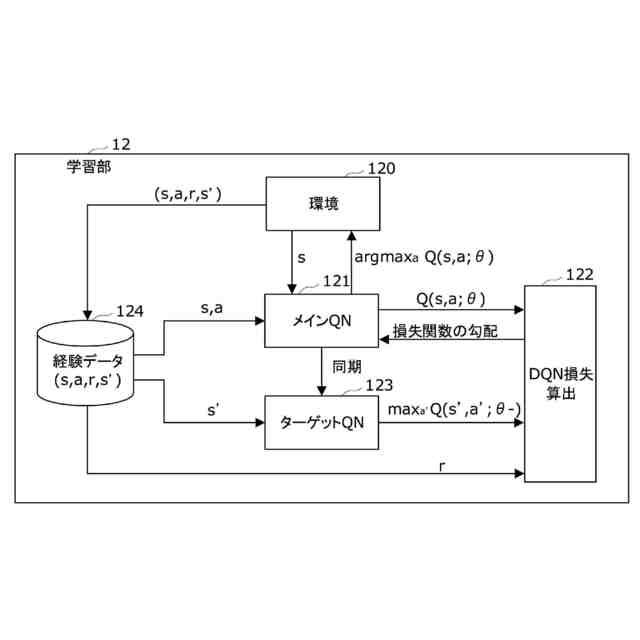
さらに、前記飛行体が前記現在の単位空間の位置から前記第1無線通信方式の通信エリアの位置に対応する第1単位空間の位置に到達するまでに、前記飛行体が前記各単位空間の位置から順次進むべき進路を計算した推定結果に報酬関数を適用して、前記飛行体が前記第1単位空間の位置へ到達するための報酬が最大化するように更新し、前記飛行体が前記各単位空間の位置から順次進むべき前記進路の方策を、前記学習モデルを用いて学習するように構成された学習部と、
前記学習部によって学習された、前記進路の方策を記憶するように構成された第2記憶部と
を備え、
前記決定部は、前記第2記憶部から前記進路の方策を読み出して、前記飛行体が次に進むべき進路を決定する
ことを特徴とする飛行誘導装置。
【請求項3】
請求項2に記載の飛行誘導装置において、
前記報酬関数は、前記飛行体における前記第1無線通信方式の通信エリアの位置に対応する前記第1単位空間の位置への到達度を変数として含む
ことを特徴とする飛行誘導装置。
【請求項4】
請求項3に記載の飛行誘導装置において、
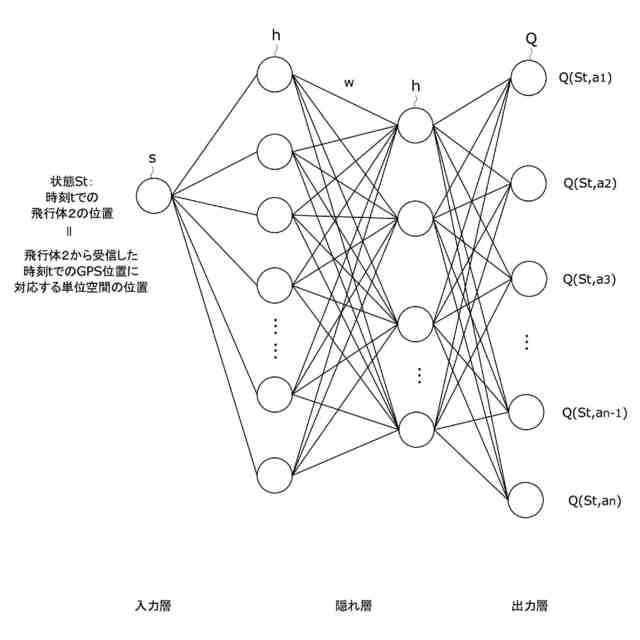
前記学習モデルは、入力層、隠れ層、および出力層を含むニューラルネットワークモデルであり、
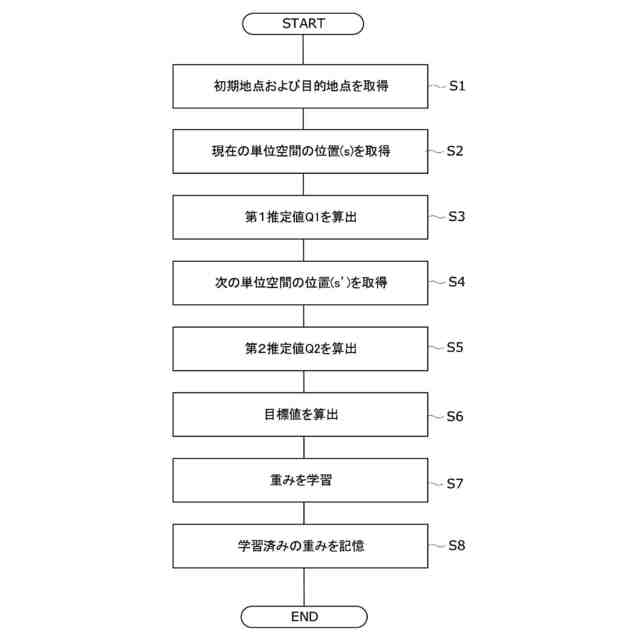
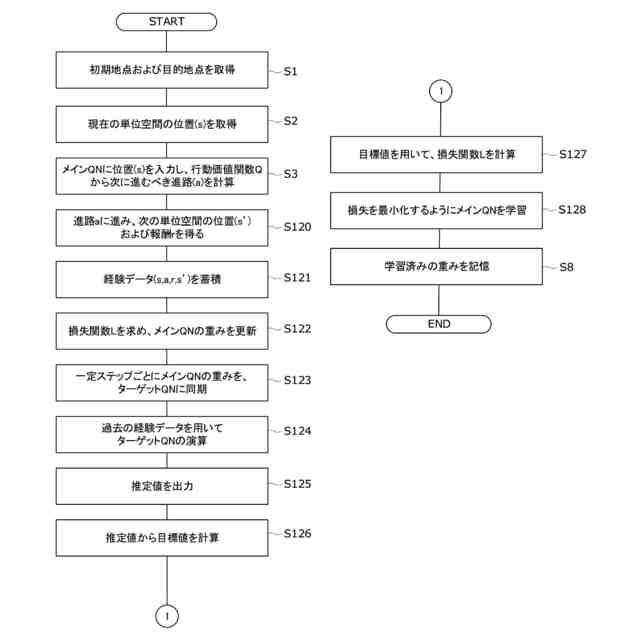
前記学習部は、前記現在の単位空間の位置を前記ニューラルネットワークモデルの入力として与え、前記ニューラルネットワークモデルの演算を行い、前記飛行体が前記現在の単位空間の位置から次に進むべき進路として、進行方向に対する所定の方向への移動に係る各々の行動をとった場合に得られる将来の前記報酬の累積値の期待値を表す行動価値関数の第1推定値を出力し、
前記学習部は、さらに、前記飛行体が次に到達した単位空間の位置を前記ニューラルネットワークモデルの入力として与え、前記ニューラルネットワークモデルの演算を行い、前記行動価値関数の第2推定値を出力し、
前記学習部は、前記第1推定値が、前記第2推定値から計算される目標値となるように、前記ニューラルネットワークモデルの重みパラメータを学習し、
前記第2記憶部は、学習済みの重みパラメータを記憶する
ことを特徴とする飛行誘導装置。
【請求項5】
請求項1に記載された飛行誘導装置において、
前記第1取得部は、前記異種の無線通信方式のうち前記移動空間を最も広い範囲でカバーする第2無線通信方式のコアネットワークを介して、前記飛行体が現在いる単位空間の位置を取得する
ことを特徴とする飛行誘導装置。
【請求項6】
請求項5に記載の飛行誘導装置において、
前記飛行誘導部は、前記第2無線通信方式の前記コアネットワークに含まれるユーザープレーン機能を介して、前記飛行体に前記次に進むべき進路に係る指示を送信する
ことを特徴とする飛行誘導装置。
【請求項7】
異種の無線通信方式の通信エリアが重畳配置された飛行体の移動空間において、初期地点の位置から、指定された第1無線通信方式の通信エリアの位置までの前記飛行体の進路を制御する飛行誘導方法であって、
前記移動空間を複数の空間に分割した単位空間の識別情報と、前記単位空間の位置と、前記単位空間をカバーする通信エリアの無線通信方式を示す情報とを関連付けて第1記憶部に記憶する第1記憶ステップと、
前記飛行体が現在いる単位空間の位置を、前記飛行体の現在の位置として取得する第1取得ステップと、
学習モデルを用いて学習された、前記飛行体が各単位空間の位置から順次進むべき進路の方策に基づいて、前記第1取得ステップで前記飛行体の前記現在の位置として取得された現在の単位空間の位置から、前記飛行体が次に進むべき進路を決定する決定ステップと、
前記決定ステップで決定された、前記飛行体が次に進むべき進路を前記飛行体に指示する飛行誘導ステップと
を備える飛行誘導方法。
【請求項8】
請求項7に記載の飛行誘導方法において、
さらに、前記飛行体が前記現在の単位空間の位置から前記第1無線通信方式の通信エリアの位置に対応する第1単位空間の位置に到達するまでに、前記飛行体が前記各単位空間の位置から順次進むべき進路を計算した推定結果に報酬関数を適用して、前記飛行体が前記第1単位空間の位置へ到達するための報酬が最大化するように更新し、前記飛行体が前記各単位空間の位置から順次進むべき前記進路の方策を、前記学習モデルを用いて学習する学習ステップと、
前記学習ステップで学習された、前記進路の方策を第2記憶部に記憶する第2記憶ステップと
を備え、
前記決定ステップは、前記第2記憶部から前記進路の方策を読み出して、前記飛行体が次に進むべき進路を決定する
ことを特徴とする飛行誘導方法。
【請求項9】
請求項8に記載の飛行誘導方法において、
前記報酬関数は、前記飛行体における前記第1無線通信方式の通信エリアの位置に対応する前記第1単位空間の位置への到達度を変数として含む
ことを特徴とする飛行誘導方法。
【請求項10】
請求項9に記載の飛行誘導方法において、
前記学習モデルは、入力層、隠れ層、および出力層を含むニューラルネットワークモデルであり、
前記学習ステップは、前記現在の単位空間の位置を前記ニューラルネットワークモデルの入力として与え、前記ニューラルネットワークモデルの演算を行い、前記飛行体が前記現在の単位空間の位置から次に進むべき進路として、進行方向に対する所定の方向への移動に係る各々の行動をとった場合に得られる将来の前記報酬の累積値の期待値を表す行動価値関数の第1推定値を出力し、
前記学習ステップは、さらに、前記飛行体が次に到達した単位空間の位置を前記ニューラルネットワークモデルの入力として与え、前記ニューラルネットワークモデルの演算を行い、前記行動価値関数の第2推定値を出力し、
前記学習ステップは、前記第1推定値が、前記第2推定値から計算される目標値となるように、前記ニューラルネットワークモデルの重みパラメータを学習し、
前記第2記憶ステップは、学習済みの重みパラメータを前記第2記憶部に記憶する
ことを特徴とする飛行誘導方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、飛行誘導装置および飛行誘導方法に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来から、ドローンなどの飛行体の飛行誘導制御として、飛行体のGPSなどの位置情報を地上システムで受信し、飛行体の位置情報と地形などの地図データベースとから設定された飛行経路に基づき進むべき飛行ポイントを見出し、そのポイントに進むための制御情報を飛行体へ送信する技術が知られている(特許文献1参照)。
【0003】
近年、ドローンなどの飛行体は、測量、物流、農業や災害調査など、様々な分野に活用されている。それぞれの活用用途で必要となる通信に対応するために、ドローンにおいても多様な無線方式で通信を行うことが求められる。
【0004】
他方において、従来から、無線通信ネットワークの中に、異種の無線通信方式や使用の異なる中継器を混在するヘテロジニアスネットワークが知られている。このような異種の無線通信方式の通信エリアが重畳された移動空間において、ドローンが特定の無線通信方式で通信を行うためには、その無線通信方式の電波が受信可能な通信エリアへドローンを誘導する必要がある。
【0005】
しかし、従来の飛行誘導技術では、ドローンが取得するGPSの位置情報および地形などの地図データベースを用いた場合であっても、異種の無線通信方式の重複する通信エリアの位置を把握していない。そのため、ドローンをランダムな進路で飛行させる制御、または、おおよその位置まで誘導する遠隔飛行制御もしくは自律飛行制御により、ドローンが移動した先の位置で、指定された無線通信方式の電波を実際に受信するか否かで判断することがあった。
【先行技術文献】
【特許文献】
【0006】
特開2002-211494号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
このように、従来の技術では、より確実に、飛行体を指定された無線通信方式の通信エリアへ飛行誘導することが困難であった。
【0008】
本発明は、上述した課題を解決するためになされたものであり、より確実に、飛行体を指定された無線通信方式の通信エリアへ飛行誘導することを目的とする。
【課題を解決するための手段】
【0009】
上述した課題を解決するために、本発明に係る飛行誘導装置は、異種の無線通信方式の通信エリアが重畳配置された飛行体の移動空間において、初期地点の位置から、指定された第1無線通信方式の通信エリアの位置までの前記飛行体の進路を制御する飛行誘導装置であって、前記移動空間を複数の空間に分割した単位空間の識別情報と、前記単位空間の位置と、前記単位空間をカバーする通信エリアの無線通信方式を示す情報とを関連付けて記憶するように構成された第1記憶部と、前記飛行体が現在いる単位空間の位置を、前記飛行体の現在の位置として取得するように構成された第1取得部と、学習モデルを用いて学習された、前記飛行体が各単位空間の位置から順次進むべき進路の方策に基づいて、前記第1取得部によって前記飛行体の前記現在の位置として取得された現在の単位空間の位置から、前記飛行体が次に進むべき進路を決定するように構成された決定部と、前記決定部によって決定された、前記飛行体が次に進むべき進路を前記飛行体に指示するように構成された飛行誘導部とを備える。
【0010】
また、本発明に係る飛行誘導装置において、さらに、前記飛行体が前記現在の単位空間の位置から前記第1無線通信方式の通信エリアの位置に対応する第1単位空間の位置に到達するまでに、前記飛行体が前記各単位空間の位置から順次進むべき進路を計算した推定結果に報酬関数を適用して、前記飛行体が前記第1単位空間の位置へ到達するための報酬が最大化するように更新し、前記飛行体が前記各単位空間の位置から順次進むべき前記進路の方策を、前記学習モデルを用いて学習するように構成された学習部と、前記学習部によって学習された、前記進路の方策を記憶するように構成された第2記憶部とを備え、前記決定部は、前記第2記憶部から前記進路の方策を読み出して、前記飛行体が次に進むべき進路を決定してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電圧回路
16日前
和研工業株式会社
多連レバー機構
29日前
株式会社クボタ
作業車
19日前
株式会社ダイフク
搬送車
19日前
ローム株式会社
半導体集積回路
24日前
エイブリック株式会社
ボルテージレギュレータ
16日前
トヨタ自動車株式会社
工作機械の制御装置
18日前
トヨタ自動車株式会社
工作機械の制御装置
17日前
株式会社やまびこ
走行制御装置
4日前
株式会社ダイフク
物品搬送設備
17日前
愛知機械テクノシステム株式会社
無人搬送車
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
日本精工株式会社
制御装置および制御方法
1か月前
株式会社ダイヘン
搬送車
16日前
株式会社ダイヘン
搬送車
16日前
株式会社ダイヘン
搬送車
16日前
株式会社ダイヘン
搬送車
16日前
井関農機株式会社
作業車両
12日前
トヨタ自動車株式会社
群制御システム及び群制御方法
1か月前
株式会社デンソー
診断装置
2日前
ミツミ電機株式会社
多方向入力装置
22日前
ミツミ電機株式会社
多方向入力装置
22日前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
22日前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
22日前
ミツミ電機株式会社
多方向入力装置
1か月前
オルガノ株式会社
運転管理方法及び運転管理装置
19日前
ミツミ電機株式会社
多方向入力装置
22日前
ローム株式会社
バイアス回路
18日前
ダイハツ工業株式会社
無人搬送車の制御方法
17日前
HEROZ株式会社
異常検知アルゴリズムの評価システム
1か月前
株式会社マキタ
作業ロボット
4日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ