TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025064706
公報種別
公開特許公報(A)
公開日
2025-04-17
出願番号
2023174650
出願日
2023-10-06
発明の名称
推定方法、及び推定装置
出願人
株式会社京三製作所
,
国立大学法人横浜国立大学
代理人
あいわ弁理士法人
主分類
G05B
17/00 20060101AFI20250410BHJP(制御;調整)
要約
【課題】データ駆動型シミュレーションにおいて、制御器の直線性/非直線性にかかわらず制御対象の出力を推定する
【解決手段】本発明の出力推定方法は、離散時間閉ループ制御系において、制御対象P(z)の入出力の実験データを用いて出力を推定するデータ駆動型シミュレーションにおいて、シミュレーションを時間領域の畳み込み演算によって行う。畳み込み演算は、入出力実験データ(u
0
,y
0
)と推定入出力値(u,y)とを時間領域で行う。入出力実験データ(u
0
,y
0
)は、制御対象を実際に動作させることによって得られる。推定入出力値(u,y)は、制御対象P(z)をシミュレーションすることによって得られる各サンプリング時刻の推定入力値(u)及び推定出力値(y)である。畳み込み演算によるシミュレーションによって、制御対象P(z)の次のサンプリング時刻の推定出力値(y)を推定する。
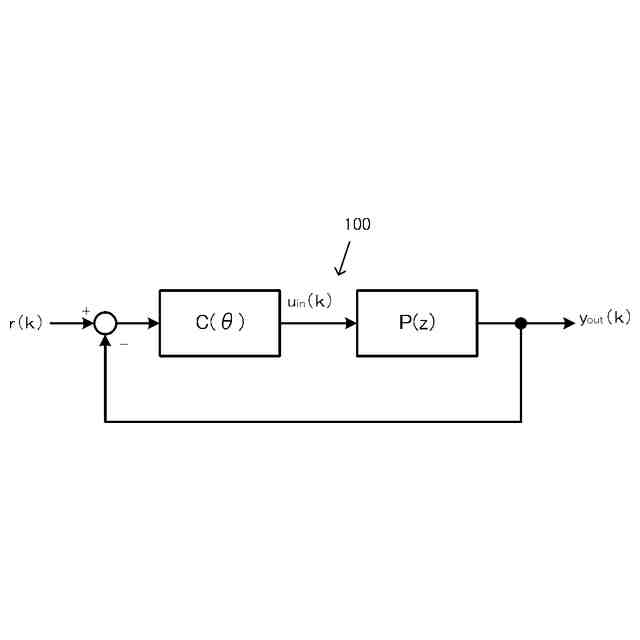
【選択図】図1
特許請求の範囲
【請求項1】
制御器の制御信号を制御対象への制御入力として入力し、前記制御対象の出力を前記制御器にフィードバックする閉ループ制御系において前記制御対象の出力を推定する方法であって、前記制御対象の入出力の実験データを用いて出力をシミュレートするデータ駆動型シミュレーション方法であり、
前記制御対象のシミュレーションで得られる推定入力値uと前記制御対象の実験で得られた実験出力データy
0
とを時間領域で畳み込み演算して得られる第1の畳み込み演算値、
及び
前記制御対象のシミュレーションで得られる推定出力値yと前記制御対象の実験で得られた実験入力データu
0
とを時間領域で畳み込み演算して得られる第2の畳み込み演算値、
を求め、
前記二つの畳み込み演算値の差分から、前記制御対象の次サンプリング時刻の推定出力値(y)を推定する、
出力推定方法。
続きを表示(約 4,800 文字)
【請求項2】
制御器の制御信号を制御対象への制御入力として入力し、前記制御対象の出力を前記制御器にフィードバックする閉ループ制御系において前記制御対象の出力を推定する方法であって、前記制御対象の入出力の実験データを用いて出力をシミュレートするデータ駆動型シミュレーション方法であり、
前記制御対象の実験で得られる実験入力データu
0
及び実験出力データy
0
の各サンプリング値を収集し、記憶する実験データの実験工程と、
前記制御器に基準値rを入力して制御器の出力信号を得るシミュレーションを行い、前記シミュレーションの出力信号を前記制御対象に対する推定入力値uとして算出し、記憶する推定入力値のシミュレーション工程と、
制御対象の推定出力値yを求める推定出力値のシミュレーション工程と、
の各工程を備え、
前記推定出力値のシミュレーション工程は、
前記推定入力値のシミュレーション工程で得られるサンプリング時刻0からk-1までの推定入力値u、及び前記実験工程で得られたサンプリング時刻kから1までの実験出力データy
0
を時間領域で畳み込み演算して第1の畳み込み演算値を求め、
推定出力値のシミュレーション工程で得られるサンプリング時刻0からk-1までの推定出力値y、及び前記実験工程で得られたサンプリング時刻kから1までの実験入力データu
0
を時間領域で畳み込み演算して第2の畳み込み演算値を求め、
前記第1の畳み込み演算値と第2の畳み込み演算値の差分を求め、前記差分から前記制御対象のサンプリング時刻kの推定出力値y(k)を求める
出力推定方法。
【請求項3】
前記実験データの実験工程は、
前記制御器と前記制御対象とをフィードバック接続した閉ループ系を実験系とし、
前記制御器のパラメータθは初期パラメータθ
0
であり、
前記制御対象は実プラントである、
請求項2に記載の出力推定方法。
【請求項4】
前記実験データの実験工程は、
前記制御対象の開ループ系を実験系とし、
前記制御対象は実プラントである、
請求項2に記載の出力推定方法。
【請求項5】
前記推定入力値のシミュレーション工程は、
前記制御器の閉ループ系をシミュレーション系とし、
前記制御器に基準値r(k)及び推定出力y(k)を入力して得られる各サンプリング時刻kの出力信号を制御対象に対する推定入力値として求める
請求項2に記載の出力推定方法。
【請求項6】
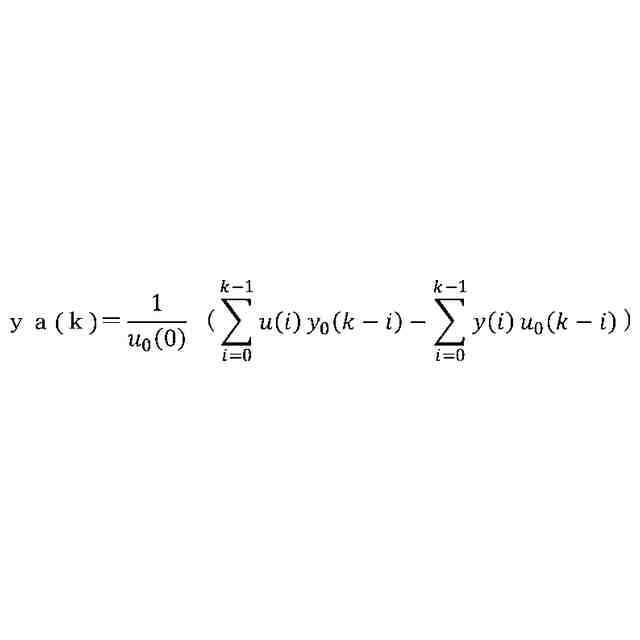
前記推定出力値のシミュレーション工程の畳み込み演算において、
前記第1の畳み込み演算値は、実験出力データy
0
(k-1)と推定入力値u(i)の各サンプリング値の積をサンプリング時刻0からk-1まで加算した総和であり、
前記第2の畳み込み演算値は、実験入力データu
0
(k-1)と推定出力値y(i)の各サンプリング値の積をサンプリング時刻0からk-1まで加算した総和であり、
前記制御対象の実験出力データy
0
(k)のサンプリング時刻k=0における値がy
0
(0)=0であるとき、
サンプリング時刻kの推定出力値y(k)を推定する演算式y
a
(k)は、前記第1の畳み込み演算値と第2の畳み込み演算値の差分を実験入力データu
0
(0)で除算した
TIFF
2025064706000012.tif
14
150
である、
請求項2に記載の出力推定方法。
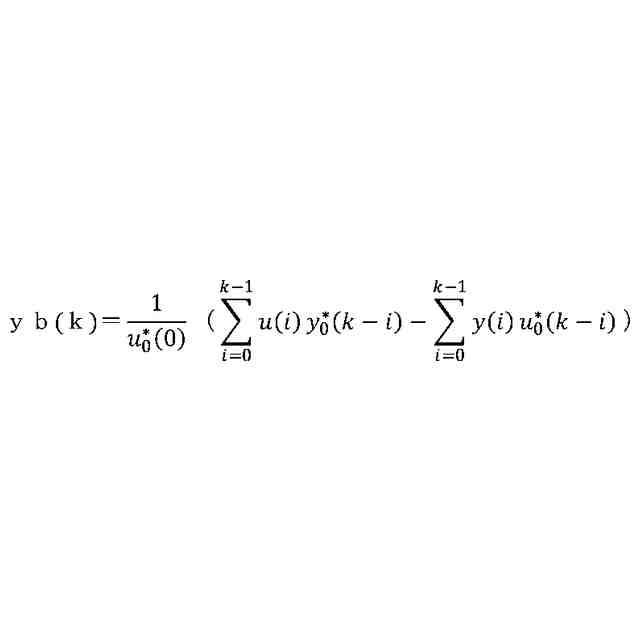
【請求項7】
前記推定出力値のシミュレーション工程の畳み込み演算は、実験出力データy
0
*
(k-1)と推定入力値u(k)の各サンプリング値の積をサンプリング時刻0からk-1まで加算した総和と、実験入力データu
0
*
(k-1)と推定出力値y(i)の各サンプリング値の積をサンプリング時刻0からk-1まで加算した総和であり、
前記制御対象の実験入力データu
0
、及び実験出力データy
0
のサンプリング時刻k=0にける収束値が定常値u
0_offset
及び定常値y
0_offset
であるとき、
サンプリング時刻kの推定出力値y(k)を推定する演算式y
b
(k)は、
前記第1の畳み込み演算値と第2の畳み込み演算値の差分を実験入力データu
0
*
(0)で除算した
TIFF
2025064706000013.tif
14
150
であり、
前記演算式y
b
(k)中のu
0
*
(k),y
0
*
(k)は、
u
0
*
(k)=u
0
(k)―u
0_offset
y
0
*
(k)=y
0
(k)―y
0_offset
である、
請求項2に記載の出力推定方法。
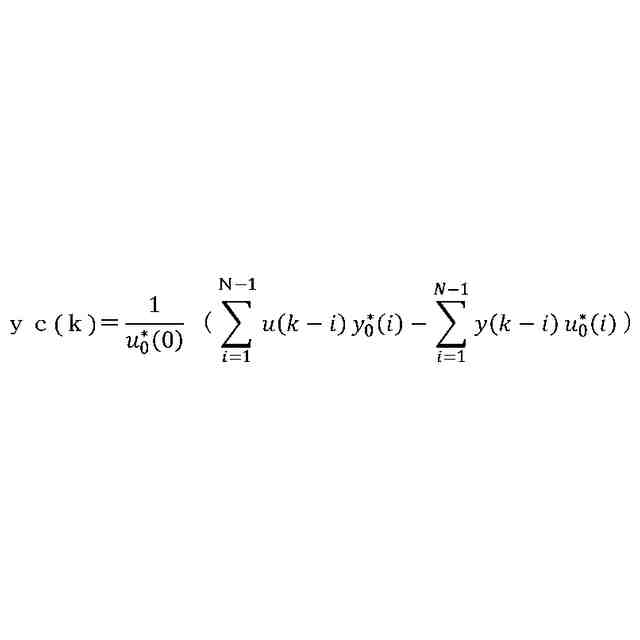
【請求項8】
前記推定出力値のシミュレーション工程の畳み込み演算は、実験出力データy
0
*
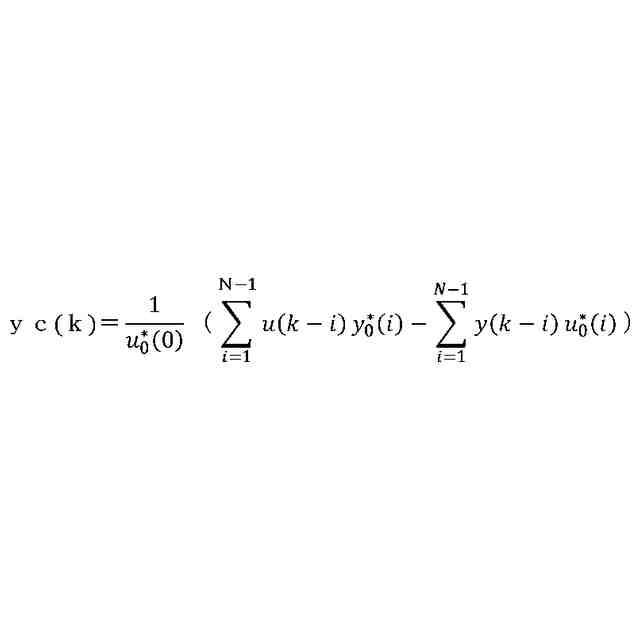
(i)と推定入力値u(k-1)の各サンプリング値の積をサンプリング時刻1からN-1まで加算した総和と、実験入力データu
0
*
(i)と推定出力値y(k-1)の各サンプリング値の積をサンプリング時刻1からN-1まで加算した総和であり、
実験データのサンプリング数Nに対して、
前記制御対象の実験入力データu
0
、及び実験出力データy
0
の(N-1)(Nはサンプリング数)を超えるサンプリング時刻(m)における(m>N-1)収束値が定常値u
0
*
(m)=u
m_offset
、及び定常値y
0
*
(m)=y
m_offset
であるとき、
k>N-1(Nはサンプリング数)に対して、サンプリング時刻kの推定出力値y(k)を推定する長期シミュレーションの演算式y
c
(k)は、
TIFF
2025064706000014.tif
15
150
であり、
前記演算式y
c
(k)中のu
0
*
,y
0
*
は、
u
0
*
(m)=u
m_offset
y
0
*
(m)=y
m_offset
である、
請求項2に記載の出力推定方法。
【請求項9】
制御器の制御信号を制御対象への制御入力として入力し、前記制御対象の出力を前記制御器にフィードバックする閉ループ制御系において前記制御対象の出力を推定する装置であって、前記制御対象の入出力の実験データを用いて出力をシミュレートするデータ駆動型シミュレーション装置であり、
前記制御対象の実験で得られた実験入力データu
0
及び実験出力データy
0
を記憶する実験データ記憶部と、
前記制御対象の推定出力値(y)を記憶する推定出力値記憶部と、
前記制御対象のシミュレーションで得られる推定入力値uを算出する推定入力値算出部と、
前記推定入力値算出部で算出した前記推定入力値uを記憶する推定入力値記憶部と、
前記制御対象の実験で得られた実験入力データu
0
及び実験出力データy0と、前記制御対象のシミュレーションで得られる推定入力値u及び推定出力値yとを用いて時間領域で畳み込み演算し、前記制御対象の次サンプリング時刻の推定出力値yを推定する演算部と、を備える、
出力推定装置。
【請求項10】
前記演算部は、
る推定入力値記憶部に記憶されるサンプリング時刻0からk-1までの推定入力値u、及び実験データ記憶部に記憶されるサンプリング時刻kから1までの実験出力データy
0
を時間領域で畳み込み演算して第1の畳み込み演算値を求め、
推定出力値記憶部に記憶されるサンプリング時刻0からk-1までの推定出力値y、及び実験データ記憶部に記憶されるサンプリング時刻kから1までの実験入力データu
0
を時間領域で畳み込み演算して第2の畳み込み演算値を求め、
前記第1の畳み込み演算値と第2の畳み込み演算値の差分を求め、
(a)前記制御対象の実験出力データy
0
(k)のサンプリング時刻k=0における値がy
0
(0)=0であるとき、
サンプリング時刻kの推定出力値y(k)を推定する演算式y
a
(k)は、前記第1の畳み込み演算値と第2の畳み込み演算値の差分を実験入力データu
0
(0)で除算した
TIFF
2025064706000015.tif
14
150
であり、
(b)前記制御対象の実験入力データu
0
、及び実験出力データy
0
のサンプリング時刻k=0にける収束値が定常値u
0_offset
及び定常値y
0_offset
であるとき、
サンプリング時刻kの推定出力値y(k)を推定する演算式y
b
(k)は、前記第1の畳み込み演算値と第2の畳み込み演算値の差分を実験入力データu
0
*
(0)で除算した
TIFF
2025064706000016.tif
14
150
であり、
前記演算式y
b
(k)中のu
0
*
,y
0
*
は、
u
0
*
=u
0
―u
0_offset
y
0
*
=y
0
―y
0_offset
であり、
(c)前記制御対象の実験入力データu
0
、及び実験出力データy
0
の(N-1)(Nはサンプリング数)を超えるサンプリング時刻(m)における(m>N-1)収束値が定常値u
0
*
(m)=u
m_offset
、及び定常値y
0
*
(m)=y
m_offset
であるとき、
k>N-1(Nはサンプリング数)に対して、サンプリング時刻kの推定出力値y(k)を推定する長期シミュレーションの演算式y
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御器を介して制御される制御対象の出力をシミュレーションにより推定する方法、推定装置、及び推定装置を駆動するプログラムに関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
従来の制御アプローチでは、制御対象モデルを同定し、同定した制御対象モデルに基づいて所定の制御特性を満足する制御器を設計し、実験によって制御特性の検証がされている。しかしながら、実際の制御対象では、開ループ応答を取得することができない場合があること、実験に長時間を要するといったこと等から、制御対象モデルの同定が難しいという課題がある。
【0003】
このような課題に対して、制御対象モデルを求めることなく実験データから直接制御器を調整するデータ駆動型制御の活用が検討されている。データ駆動型制御は、一回の実験で得られたデータのみに基づいて閉ループ系が参照モデルに近づくように制御パラメータを最適化する制御であり、例えばVRFTやFRITが知られている。
【0004】
データ駆動型制御アプローチに代えて、データ駆動型制御シミュレーションが提案されている。データ駆動型制御シミュレーションは、制御対象(プラント)の入力データと出力データ、及び目的の制御入力を与え、これらのデータに基づいて制御対象の応答出力を推定するものである。
【0005】
データ駆動型制御シミュレーションとして、部分空間法に基づくもの(非特許文献1,2)、部分空間法に基づかないもの(非特許文献3,4,5)が知られている。部分空間モデルに基づいたシミュレーションは、非線形性の制御入力に対処するために制御対象(プラント)からの出力データが必要であり、また、逆行列演算による計算コストが過大となる。他方、部分空間法に基づかないシミュレーションは、制御器の非線形性を考慮することができない。
【0006】
他のシミュレーションによる出力推定方法として、一回の試行に基づいて制御対象への周期入出力応答を求める工程と、目的の制御信号に対する制御対象の応答を演算式に基づいて求める工程とを含むによって出力推定方法も提案されている。この出力推定方法では、実験データのフーリエ変換と制御器の周波数特性からフィードバック系の入出力応答の周波数成分を求め、求めた周波数成分を逆フーリエ変換して仮想時間応答を求める(特許文献1,非特許文献5)。
【先行技術文献】
【特許文献】
【0007】
特開2021-43573号公報
【非特許文献】
【0008】
I.Markovsky,J.C.Willems,P.Rapisarda,and B.L.D.Moor,“Data driven simulation with applications to system identification,” IFAC Proceedings Volumes, vol.38,no.1 pp.970-9725.2005.
I.Markovsky,and P.Rapisarda,“Data driven simulation and Control,”International Journal f Control,vol.81,no.12 pp.1946-1959,2008.
O.Kaneko and T.Nakamura,“Data-driven prediction of 2dof control systems with updated feedforward controller,”in 2017 56th Annal Conference of the Society of Instrument and Control Engineers of Japan (SICE), pp. 259-262,20717
R.Hoogendijk,M.van de Molengraft,A.den Hamer,G.Angelis,and M.Steinbuch,“Computation of transfer function data from frequency response data with application to data-based root-locus,” Control Engineering practice,vol.37.pp.20-31,2015
M. Kosaka, A. Kosaka, and M. Kosaka,“Virtual time-response base iterative gain evaluation and redesign,” IFAC-PapersOnLine, vol.53, no. 2, pp. 3946-3952,2020
【発明の概要】
【発明が解決しようとする課題】
【0009】
従来提案されているデータ駆動型制御シミュレーションは、制御対象(プラント)の構築が不要であるという特徴を有するものの、制御器を含むシステムの非線形性に係わる課題がある。例えば、非線形性の制御入力に対処するために制御対象(プラント)からの出力データが必要であること、閉ループ系システムの非線形性を取り扱うことができないことなどの非線形性に係わる課題がある。
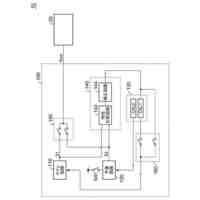
【0010】
図11は、非特許文献5の仮想時間応答ベースの反復ゲイン評価、及び再設計(V-tiger:Virtual time-response base iterative gain evaluation and redesign)法が制御する系を示している。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社京三製作所
生成装置
1か月前
株式会社京三製作所
踏切監視装置
3日前
株式会社京三製作所
状態監視装置
17日前
株式会社京三製作所
パルス電源装置
17日前
株式会社京三製作所
パルス電源装置
17日前
株式会社京三製作所
制御器の設計方法
1か月前
株式会社京三製作所
自動列車運転装置
1か月前
株式会社京三製作所
システムおよび方法
11日前
株式会社京三製作所
車上装置及び判定方法
1か月前
株式会社豊田自動織機
産業車両
3か月前
株式会社カネカ
製造システム
3か月前
オムロン株式会社
スレーブ装置
2か月前
愛知製鋼株式会社
車両用システム
3か月前
株式会社熊谷組
障害物の検出方法
2か月前
ローム株式会社
基準電圧源
3か月前
株式会社クボタ
作業車
9日前
株式会社クボタ
作業車
1か月前
新電元工業株式会社
作業用ロボット
1か月前
豊田合成株式会社
機器制御装置
2か月前
ローム株式会社
半導体集積回路
10日前
株式会社ダイフク
搬送設備
3か月前
株式会社ダイフク
搬送設備
2か月前
株式会社アサヒエンタープライズ
調整弁
25日前
カヤバ株式会社
減圧弁
2か月前
トヨタ自動車株式会社
クラッチペダル
3か月前
株式会社ダイフク
物品搬送設備
17日前
トヨタ自動車株式会社
制御装置
2か月前
キヤノン株式会社
配送システム
3か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
2か月前
エイブリック株式会社
電流補償回路及び半導体装置
1か月前
日野自動車株式会社
自動運転装置
1か月前
株式会社アマダ
工作機械制御装置
1か月前
RFルーカス株式会社
自動棚卸ロボット
4日前
株式会社CAOS
移動体の制御システム
2か月前
村田機械株式会社
搬送車システム
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ