TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025064494
公報種別
公開特許公報(A)
公開日
2025-04-17
出願番号
2023174315
出願日
2023-10-06
発明の名称
数値制御装置および数値制御方法
出願人
株式会社アイシン
代理人
弁理士法人プロスペック特許事務所
主分類
G05B
19/416 20060101AFI20250410BHJP(制御;調整)
要約
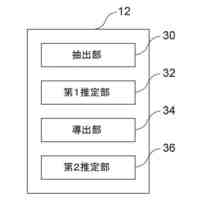
【課題】早送り時間の短縮を図ることができるNC工作機械の数値制御装置を提供する。
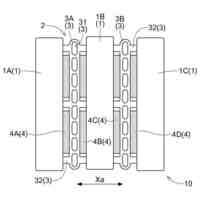
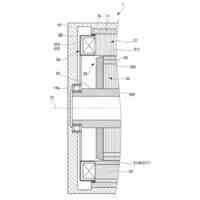
【解決手段】数値制御装置1は、主軸111とテーブル12に固定されたワークとが目標とする相対位置関係となるように主軸111をX-Y軸方向に移動させるとともにテーブル12をZ軸方向に平行な軸線を中心に回転させる早送り制御において、主軸111のX軸方向の移動に要する第一時間t
X
、主軸111のY軸方向の移動に要する第二時間t
Y
、およびテーブル12の回転に要する第三時間t
θ
の3つの時間のうちの最長である時間が最短となる位置を、主軸111およびテーブル12の相対移動および回転移動の移動終了位置に設定する処理部31を備える。
【選択図】図1
特許請求の範囲
【請求項1】
第一方向に直角な面方向に相対移動可能、かつ、前記第一方向に平行な軸線回りに相対回転移動可能な主軸およびテーブルを備える工作機械を制御する数値制御装置であって、
前記主軸と前記テーブルに固定されるワークの特定箇所とが目標とする相対位置関係となるように前記主軸と前記テーブルとを相対移動させる早送りにおいて、前記主軸と前記特定箇所とが前記目標とする相対位置関係となる前記主軸の位置および前記特定箇所の位置である一致位置のうち、前記主軸と前記テーブルとが前記面方向に相対移動した場合に前記面方向のうちの1軸の方向について前記主軸が前記一致位置に到達するまでに要する第一時間、前記主軸と前記テーブルとが前記面方向に相対移動した場合に前記面方向のうちの前記1軸に直交する他の1軸の方向について前記主軸が前記一致位置に到達するまでに要する第二時間、前記主軸と前記テーブルとが相対回転した場合に前記特定箇所が前記一致位置に到達するまでに要する第三時間、の3つの時間のうちの最長である時間が最短となる前記一致位置を、前記早送りにおける前記主軸および前記特定箇所の移動終了位置に設定する処理部を備える、数値制御装置。
続きを表示(約 1,000 文字)
【請求項2】
請求項1に記載の数値制御装置であって、
前記処理部は、前記第一時間、前記第二時間、および前記第三時間を、前記第一方向視において、「前記テーブルの回転中心と早送り前における前記主軸の位置とを結ぶ線分」と「前記テーブルの回転中心と前記主軸の前記一致位置とを結ぶ線分」とがなす角度を変数とする関数で表した場合の前記3つの時間のうちの最長である時間が最短となる前記角度を探索し、前記探索により検出された前記角度を用いて前記移動終了位置を特定する、数値制御装置。
【請求項3】
第一方向に直角な面方向に相対移動可能、かつ、前記第一方向に平行な軸線回りに相対回転移動可能な主軸およびテーブルを備える工作機械を制御する数値制御装置が実行する数値制御方法であって、
前記主軸と前記テーブルに固定されるワークの特定箇所とが目標とする相対位置関係となるように前記主軸と前記テーブルとを相対移動させる早送りにおいて、前記主軸と前記特定箇所とが前記目標とする相対位置関係となる前記主軸の位置および前記特定箇所の位置である一致位置のうち、前記主軸と前記テーブルとが前記面方向に相対移動した場合に前記面方向のうちの1軸の方向について前記主軸が前記一致位置に到達するまでに要する第一時間、前記主軸と前記テーブルとが前記面方向に相対移動した場合に前記面方向のうちの前記1軸に直交する他の1軸の方向について前記主軸が前記一致位置に到達するまでに要する第二時間、前記主軸と前記テーブルとが相対回転した場合に前記特定箇所が前記一致位置に到達するまでに要する第三時間、の3つの時間のうちの最長である時間が最短となる前記一致位置を、前記早送りにおける前記主軸および前記特定箇所の移動終了位置に設定する、数値制御方法。
【請求項4】
請求項3に記載の数値制御方法であって、
前記第一時間、前記第二時間、および前記第三時間を、前記第一方向視において、「前記テーブルの回転中心と早送り前における前記主軸の位置とを結ぶ線分」と「前記テーブルの回転中心と前記主軸の前記一致位置とを結ぶ線分」とがなす角度を変数とする関数で表した場合の前記3つの時間のうちの最長である時間が最短となる前記角度を探索し、前記探索により検出された前記角度を用いて前記移動終了位置を特定する、数値制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、数値制御装置および数値制御方法に関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
従来、工作機械を制御する数値制御装置において、送り機構を制御して主軸(工具)とワークとを相対移動させる構成が公知である(特許文献1参照)。しかしながら、早送りする場合に主軸を1軸ごとに移動させる構成では、主軸を所定の移動終了点(例えば次の加工箇所)に移動させる場合、主軸をある1軸方向に移動させた後、前記1軸に対して直角な他の1軸方向に移動させる必要がある。このような構成では、主軸を所定の移動終了点に移動させるために要する時間(早送り時間)は、主軸の移動終了点までの各軸方向の距離および各軸方向の主軸の最大移動速度により決まる。このため、早送り時間の短縮を図ることが困難である。
【0003】
早送り時間の短縮を図ることができる数値制御装置として、特許文献2には、テーブルを回転させる数値制御装置が開示されている。具体的には、特許文献2に開示される数値制御装置は、互いに直交する2軸方向(X-Y軸方向)に移動可能な主軸と、前記2軸方向に直角な方向(Z軸方向)を中心に回転可能なテーブルとを備える。そして、特許文献2に開示される数値制御装置は、主軸が前記2軸方向のそれぞれの方向に最大移動速度で移動する場合の合成移動軌跡(すなわち、最大合成速度で移動する場合の移動軌跡)を計算し、移動終了点が合成移動軌跡上に位置するようにテーブルを回転させるように構成される。
【0004】
しかしながら、主軸の移動終了点を主軸が最大合成速度で移動する場合の移動軌跡上に移動させるためのテーブルの回転角度は、移動開始前における主軸と回転開始前におけるテーブルとの位置関係に応じて異なる。そして、この回転角度が大きいと、テーブルの回転に要する時間が長くなるから、早送り時間の短縮を図ることができない場合が生じる。
【先行技術文献】
【特許文献】
【0005】
特開2015-79286号公報
特開2018-18294号公報
【発明の概要】
【0006】
(発明が解決しようとする課題)
上記実情に鑑み、本発明の目的の1つは、早送り時間の短縮を図ることができる数値制御装置および数値制御方法を提供することである。
【0007】
(課題を解決するための手段)
前記目的を達成するため、本発明に係る数値制御装置は、
第一方向に直角な面方向に相対移動可能、かつ、前記第一方向に平行な軸線回りに相対回転移動可能な主軸およびテーブルを備える工作機械を制御する数値制御装置であって、
前記主軸と前記テーブルに固定されるワークの特定箇所とが目標とする相対位置関係となるように前記主軸と前記テーブルとを相対移動させる早送りにおいて、前記主軸と前記特定箇所とが前記目標とする相対位置関係となる前記主軸の位置および前記特定箇所の位置である一致位置のうち、前記主軸と前記テーブルとが前記面方向に相対移動した場合に前記面方向のうちの1軸の方向について前記主軸が前記一致位置に到達するまでに要する第一時間、前記主軸と前記テーブルとが前記面方向に相対移動した場合に前記面方向のうちの前記1軸に直交する他の1軸の方向について前記主軸が前記一致位置に到達するまでに要する第二時間、前記主軸と前記テーブルとが相対回転した場合に前記特定箇所が前記一致位置に到達するまでに要する第三時間、の3つの時間のうちの最長である時間が最短となる前記一致位置を、前記早送りにおける前記主軸および前記特定箇所の移動終了位置に設定する処理部を備える。
【0008】
また、本発明に係る数値制御方法は、
第一方向に直角な面方向に相対移動可能、かつ、前記第一方向に平行な軸線回りに相対回転移動可能な主軸およびテーブルを備える工作機械を制御する数値制御装置が実行する数値制御方法であって、
前記主軸と前記テーブルに固定されるワークの特定箇所とが目標とする相対位置関係となるように前記主軸と前記テーブルとを相対移動させる早送りにおいて、前記主軸と前記特定箇所とが前記目標とする相対位置関係となる前記主軸の位置および前記特定箇所の位置である一致位置のうち、前記主軸と前記テーブルとが前記面方向に相対移動した場合に前記面方向のうちの1軸の方向について前記主軸が前記一致位置に到達するまでに要する第一時間、前記主軸と前記テーブルとが前記面方向に相対移動した場合に前記面方向のうちの前記1軸に直交する他の1軸の方向について前記主軸が前記一致位置に到達するまでに要する第二時間、前記主軸と前記テーブルとが相対回転した場合に前記特定箇所が前記一致位置に到達するまでに要する第三時間、の3つの時間のうちの最長である時間が最短となる前記一致位置を、前記早送りにおける前記主軸および前記特定箇所の移動終了位置に設定する。
【0009】
本発明に係る数値制御装置および数値制御方法においては、「主軸の位置とテーブルに固定されるワークの特定箇所の位置とが第一方向視において一致する位置」のうち、第一時間、第二時間、および第三時間の3つの時間のうちの最長の時間が最短となる位置を移動終了位置に設定する。したがって、このような構成によれば、主軸およびテーブルが移動終了位置に到達するまでに要する時間を短くできる。すわわち、第一時間、第二時間、および第三時間の3つの時間のうちの最長の時間が、主軸およびテーブルが「主軸の位置とテーブルに固定されるワークの特定箇所の位置とが第一方向視において一致する位置」に移動するために要する時間である。このような位置は、特定の1カ所に限定されず、複数存在しうる。そして、前記の3つの時間は、「主軸の位置とテーブルに固定されるワークの特定箇所の位置とが第一方向視において一致する位置」の具体的な位置に応じて異なる。そこで、移動終了位置を上記のように設定することにより、主軸およびテーブルが移動終了位置に到達するまでに要する時間を短くできる。
【図面の簡単な説明】
【0010】
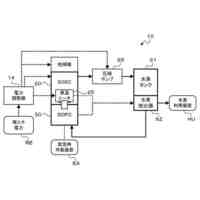
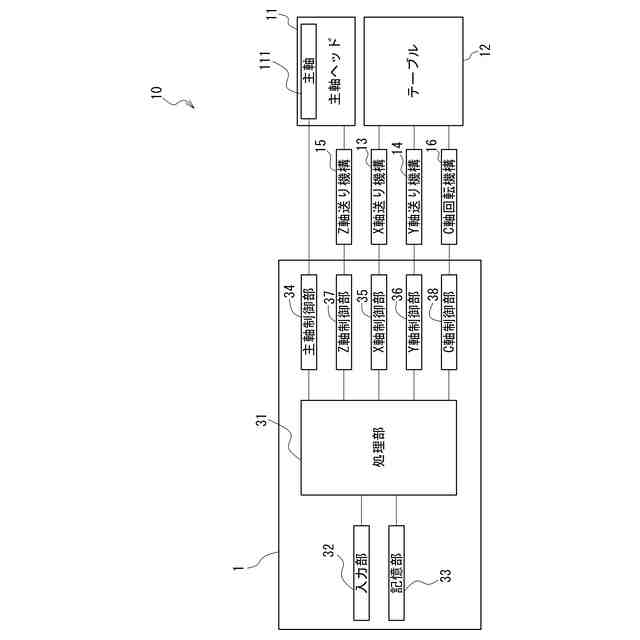
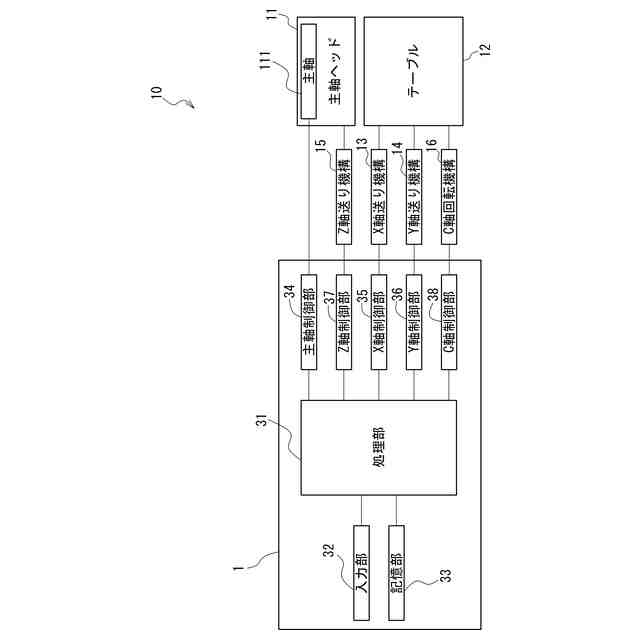
図1は、本実施形態に係る数値制御装置、および数値制御装置が適用されるNC工作機械の構成を示す模式図である。
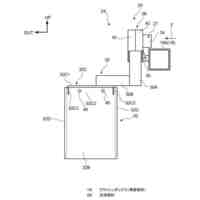
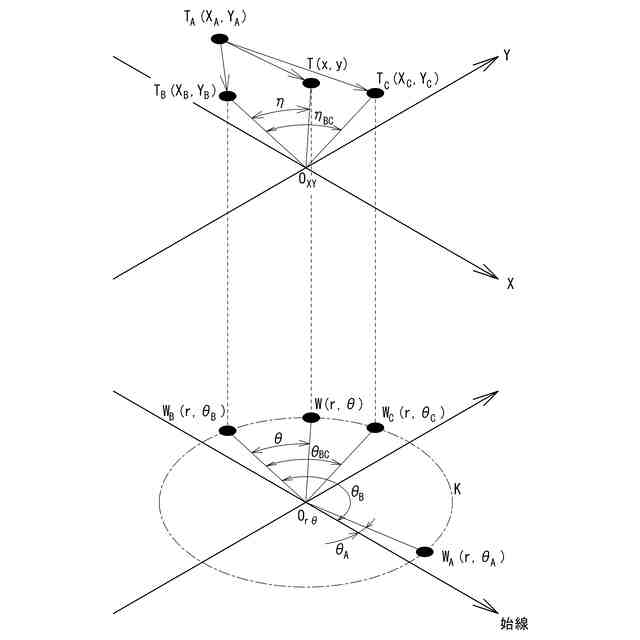
図2は、本実施形態に係る数値制御方法を説明する図である。
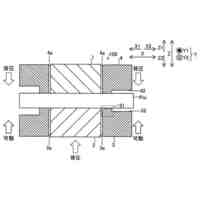
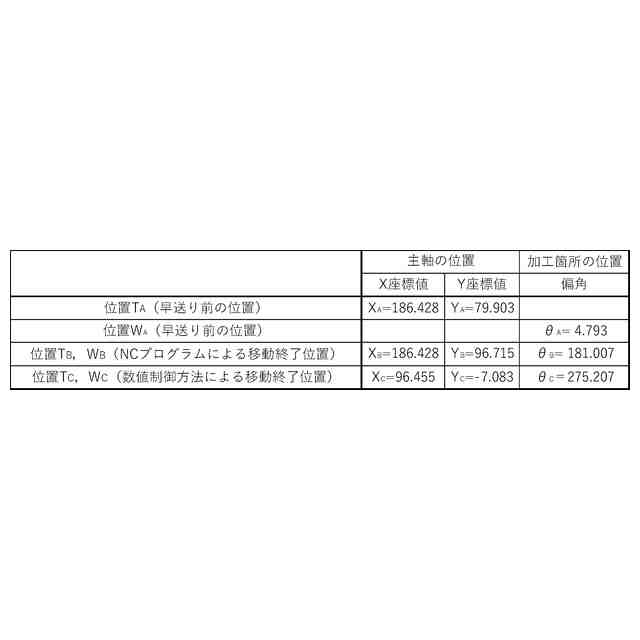
図3Aは、早送り前後の主軸および加工箇所の位置の例を示す表である。
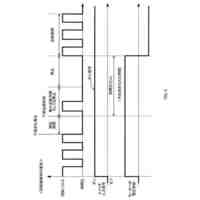
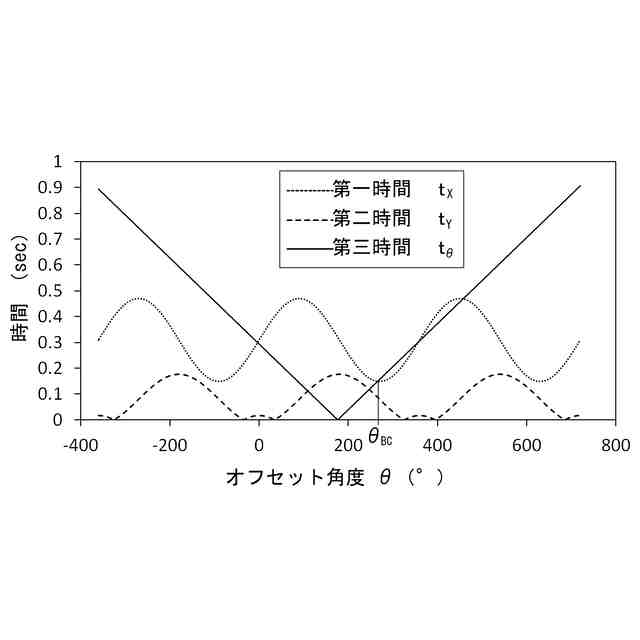
図3Bは、第一時間、第二時間、および第三時間の例を示すグラフである。
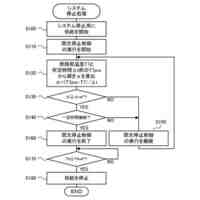
図4は、数値制御装置の具体的な動作を示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社アイシン
電池
5日前
株式会社アイシン
変速機
今日
株式会社アイシン
熱交換器
5日前
株式会社アイシン
内燃機関
13日前
株式会社アイシン
物体検出装置
8日前
株式会社アイシン
物体検出装置
8日前
株式会社アイシン
機械学習装置
7日前
株式会社アイシン
後輪操舵装置
12日前
株式会社アイシン
マニホールド
13日前
株式会社アイシン
物体検出装置
8日前
株式会社アイシン
ドア支持装置
5日前
株式会社アイシン
バッテリケース
5日前
株式会社アイシン
車両用駆動装置
6日前
株式会社アイシン
車両用駆動装置
13日前
株式会社アイシン
車両用駆動装置
今日
株式会社アイシン
サンルーフ装置
7日前
株式会社アイシン
サンルーフ装置
7日前
株式会社アイシン
アクチュエータ
7日前
株式会社アイシン
バッテリ温調装置
5日前
株式会社アイシン
水素製造システム
7日前
株式会社アイシン
燃料電池システム
7日前
株式会社アイシン
電動車用冷却プレート
5日前
株式会社アイシン
バッテリーの支持構造
6日前
株式会社アイシンナノテクノロジーズ
粉体の定量フィーダ装置
5日前
株式会社アイシン
トルクリミッタ付ダンパ
12日前
株式会社アイシン
ロータの製造方法及びロータ
5日前
株式会社アイシン
回転電機及び回転電機の製造方法
13日前
株式会社アイシン
数値制御装置および数値制御方法
5日前
トヨタ自動車株式会社
車両前部構造
5日前
株式会社アイシン
プレス成形装置およびプレス成形方法
今日
トヨタ紡織株式会社
乗物用シート
13日前
株式会社豊田中央研究所
回転電機システムの温度に対する状態量の寄与度を解析する温度予測解析装置及びそれを用いた回転電機システム
今日
株式会社豊田中央研究所
位置推定装置、位置推定システム及びプログラム
13日前
エイブリック株式会社
基準電圧回路
12日前
和研工業株式会社
多連レバー機構
25日前
スター精密株式会社
工作機械
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ