TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025062322
公報種別
公開特許公報(A)
公開日
2025-04-14
出願番号
2023171299
出願日
2023-10-02
発明の名称
物体検出装置
出願人
株式会社アイシン
代理人
弁理士法人酒井国際特許事務所
主分類
G01S
15/04 20060101AFI20250407BHJP(測定;試験)
要約
【課題】障害物の見落としを抑制し、障害物の検出精度を向上させることが可能な物体検出装置を提供する。
【解決手段】物体検出装置は、移動体から送信された送信波が物体に反射されることにより生じる反射波の強度の時系列変化に基づいて移動体の周辺に存在する障害物を検出する。物体検出装置は、反射波の強度の移動平均値に基づいて移動体の移動に応じて変動する変動閾値を算出する閾値演算部と、反射波の強度が変動閾値より大きいか否かに基づいて障害物の存否を判定する判定部と、を備え、閾値演算部は、少なくとも1つの過去の移動平均値に基づいて現在の移動平均値を平滑化した平滑移動平均値を算出し、平滑移動平均値に基づいて変動閾値を算出する。
【選択図】図4
特許請求の範囲
【請求項1】
移動体から送信された送信波が物体に反射されることにより生じる反射波の強度の時系列変化に基づいて前記移動体の周辺に存在する障害物を検出する物体検出装置であって、
前記反射波の強度の移動平均値に基づいて前記移動体の移動に応じて変動する変動閾値を算出する閾値演算部と、
前記反射波の強度が前記変動閾値より大きいか否かに基づいて前記障害物の存否を判定する判定部と、
を備え、
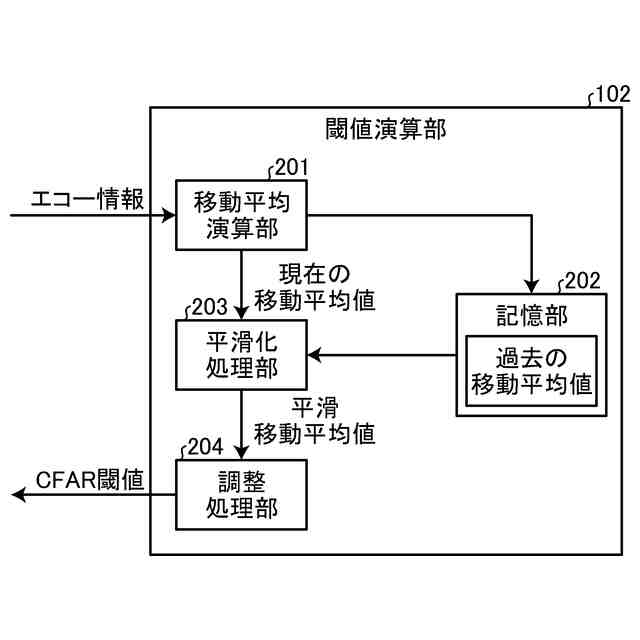
前記閾値演算部は、少なくとも1つの過去の移動平均値に基づいて現在の移動平均値を平滑化した平滑移動平均値を算出し、前記平滑移動平均値に基づいて前記変動閾値を算出する、
物体検出装置。
続きを表示(約 370 文字)
【請求項2】
前記閾値演算部は、前記現在の移動平均値に基づく前記変動閾値が予め定められた固定閾値より大きい場合には、当該現在の移動平均値を用いることなく、少なくとも1つの前記過去の移動平均値に基づいて前記平滑移動平均値を算出する、
請求項1に記載の物体検出装置。
【請求項3】
前記閾値演算部は、前記平滑移動平均値の算出に用いられる前記過去の移動平均値を、前記障害物が存在しないと判定された検出周期に対応する前記過去の移動平均値に限定する、
請求項1又は2に記載の物体検出装置。
【請求項4】
前記閾値演算部は、前記判定部により存在すると判定された前記障害物の距離に応じて前記平滑移動平均値の算出に用いられる前記過去の移動平均値の数を変化させる、
請求項1又は2に記載の物体検出装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、物体検出装置に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
車両等の移動体において、超音波等の送受信により得られるTOF(Time Of Flight)やドップラーシフト等の情報に基づいて移動体の周辺に存在する障害物を検出する物体検出装置が利用されている。このような物体検出装置において、検出対象でない物体(例えば路面等)からの反射波によるノイズの影響を抑制するための技術として、CFAR(Constant False Alarm Rate)処理が利用されている。CFAR処理によれば、時系列で変化する反射波の強度の移動平均値に基づいて、反射波の反射元の物体が障害物であるか否かを判定するための閾値が路面の状態等に応じて適正化される。
【先行技術文献】
【特許文献】
【0003】
特開2016-206011号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記のようなCFAR処理によれば、基本的にはノイズの影響を低減し、障害物の検出精度を向上させることができるが、状況によっては検出精度が低下する可能性がある。例えば、検出範囲に障害物が存在する場合、反射波の強度の移動平均値が上昇するため、CFAR処理により設定される閾値が高くなり、障害物の見落としが発生する可能性が高くなる。
【0005】
本発明は、上記に鑑みてなされたものであって、障害物の見落としを抑制し、障害物の検出精度を向上させることが可能な物体検出装置を提供する。
【課題を解決するための手段】
【0006】
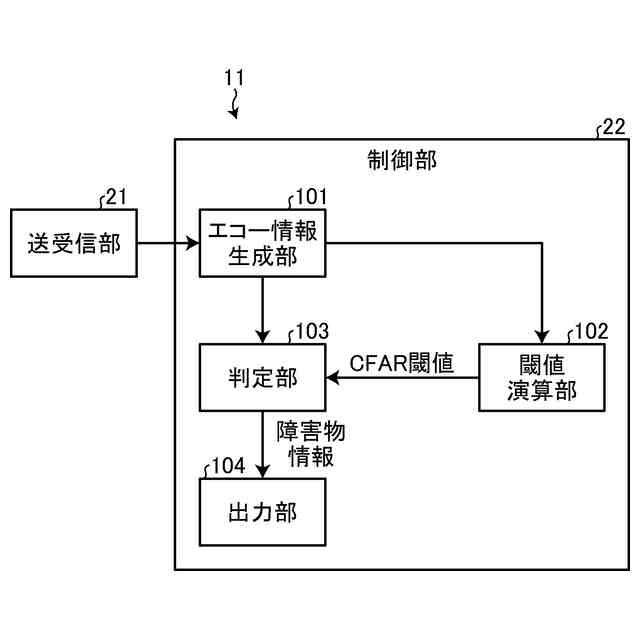
本発明の一態様である物体検出装置は、移動体から送信された送信波が物体に反射されることにより生じる反射波の強度の時系列変化に基づいて移動体の周辺に存在する障害物を検出する物体検出装置であって、反射波の強度の移動平均値に基づいて移動体の移動に応じて変動する変動閾値を算出する閾値演算部と、反射波の強度が変動閾値より大きいか否かに基づいて障害物の存否を判定する判定部と、を備え、閾値演算部は、少なくとも1つの過去の移動平均値に基づいて現在の移動平均値を平滑化した平滑移動平均値を算出し、平滑移動平均値に基づいて変動閾値を算出する。
【発明の効果】
【0007】
本発明によれば、障害物の見落としを抑制し、障害物の検出精度を向上させることが可能な物体検出装置を提供することが可能となる。
【図面の簡単な説明】
【0008】
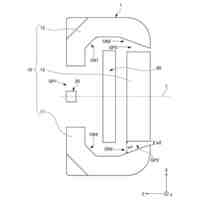
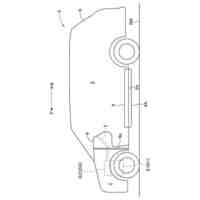
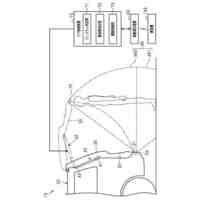
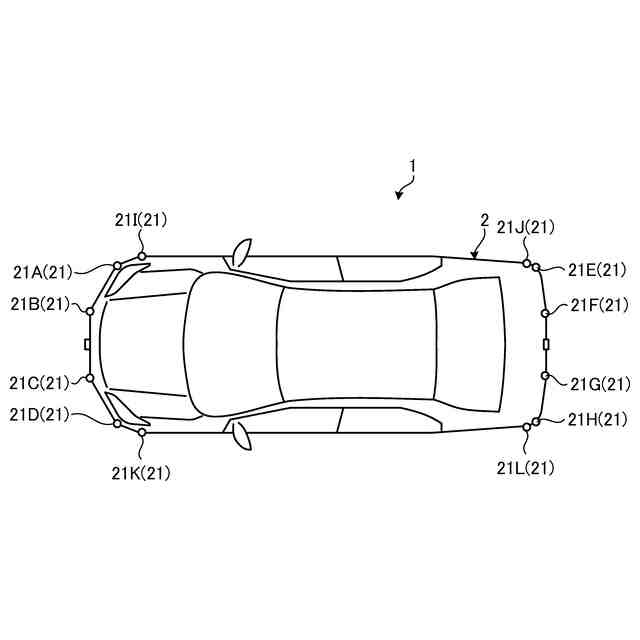
図1は、第1実施形態に係る車両の構成の一例を示す図である。
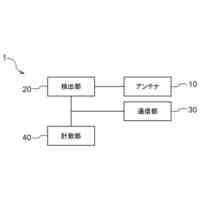
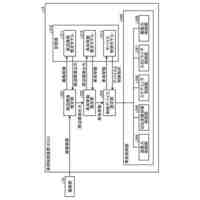
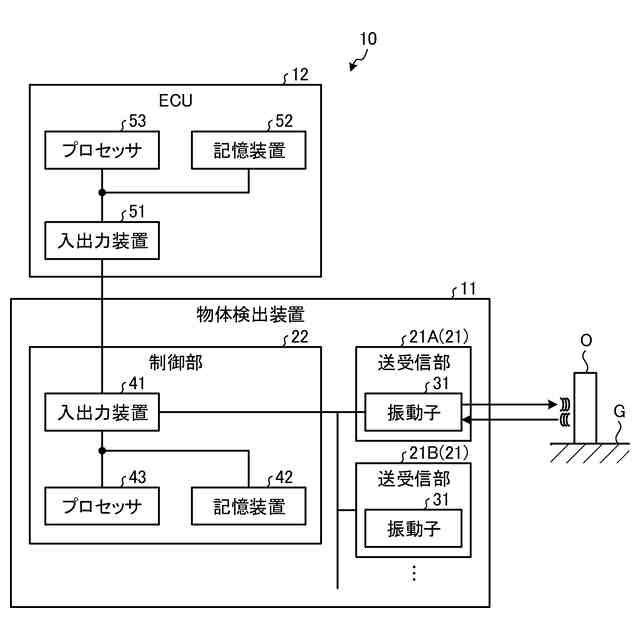
図2は、第1実施形態に係る車両制御システムの構成の一例を示す図である。
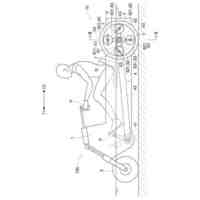
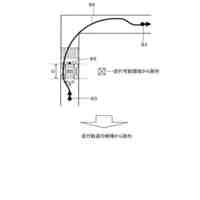
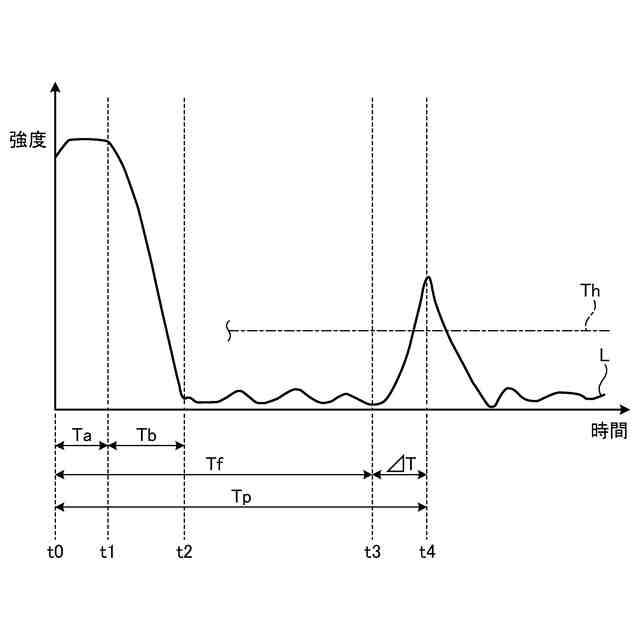
図3は、第1実施形態に係るTOF法による距離の算出方法の一例を示す図である。
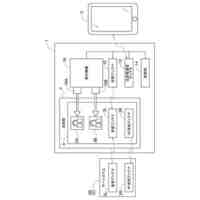
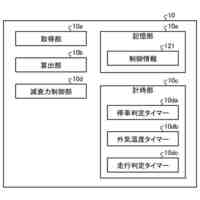
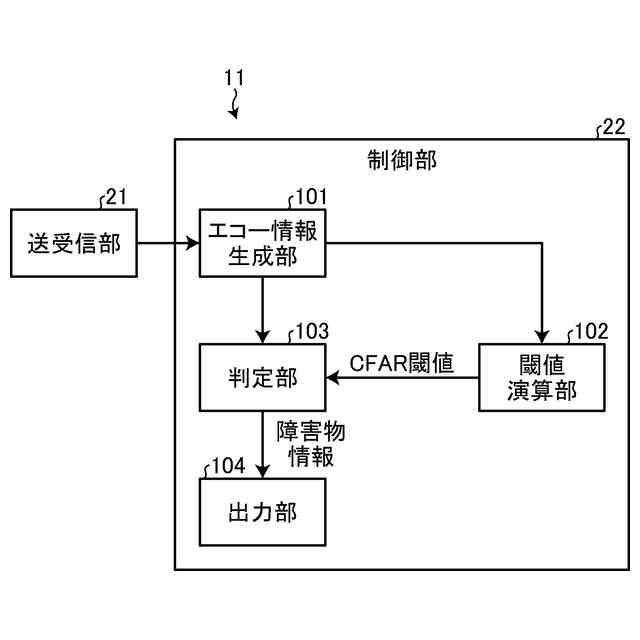
図4は、第1実施形態に係る物体検出装置の機能構成の一例を示す図である。
図5は、第1実施形態に係る閾値演算部に含まれる機能構成の一例を示す図である。
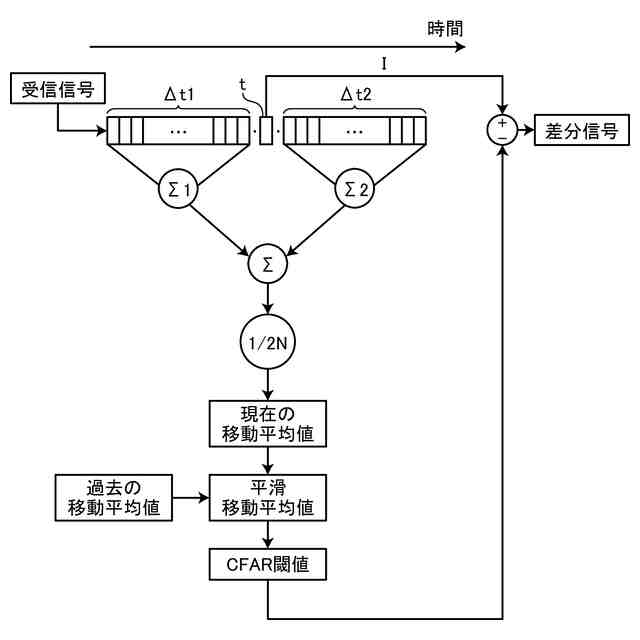
図6は、第1実施形態に係るCFAR閾値を算出する際の処理の一例を示す図である。
図7は、第1実施形態に係る現在の移動平均値と過去の移動平均値との関係の一例を示す図である。
図8は、第1実施形態に係る現在の移動平均値に基づくCFAR閾値の一例を示す図である。
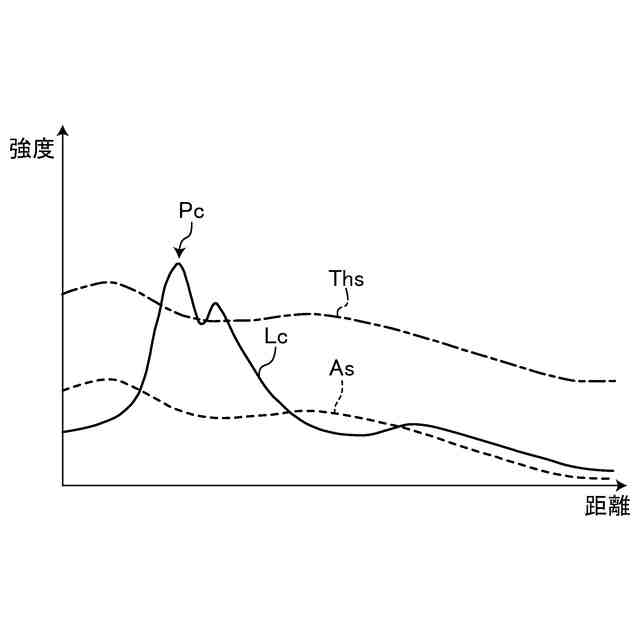
図9は、第1実施形態に係る平滑移動平均値に基づくCFAR閾値の一例を示す図である。
図10は、第1実施形態の物体検出装置における処理の一例を示すフローチャートである。
図11は、第1実施形態に係る現在の移動平均値に基づくCFAR閾値と固定閾値との関係の一例を示す図である。
図12は、第2実施形態に係る物体検出装置における処理の一例を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態について図面を参照して説明する。以下に記載する実施形態の構成並びに当該構成によってもたらされる作用及び効果は一例であって、本発明は以下の記載内容に限定されるものではない。
【0010】
(第1実施形態)
図1は、第1実施形態に係る車両1の構成の一例を示す図である。車両1は、本実施形態に係る物体検出装置が搭載される移動体の一例である。本実施形態に係る物体検出装置は、超音波の送受信により取得されるTOF(Time Of Flight)やドップラーシフト等の情報に基づいて車両1の周辺に存在する障害物を検出する装置である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社アイシン
検査装置
15日前
株式会社アイシン
流体機械
1か月前
株式会社アイシン
流体機械
1か月前
株式会社アイシン
流体機械
1か月前
株式会社アイシン
熱交換器
8日前
株式会社アイシン
フロア部材
28日前
株式会社アイシン
シフト装置
2日前
株式会社アイシン
リーン車両
23日前
株式会社アイシン
電流センサ
今日
株式会社アイシン
自律移動体
28日前
株式会社アイシン
自律移動体
28日前
株式会社アイシン
自律移動体
28日前
株式会社アイシン
自律移動体
28日前
株式会社アイシン
制御システム
13日前
株式会社アイシン
水陸両用車両
1か月前
株式会社アイシン
車載制御装置
23日前
株式会社アイシン
キーユニット
22日前
株式会社アイシン
マニホールド
22日前
株式会社アイシン
運転支援装置
21日前
株式会社アイシン
車両制御装置
1か月前
株式会社アイシン
歩行支援装置
21日前
株式会社アイシン
発電システム
21日前
株式会社アイシン
車両下部構造
21日前
株式会社アイシン
車両駆動装置
9日前
株式会社アイシン
車両制御装置
3日前
株式会社アイシン
運転支援装置
9日前
株式会社アイシン
電力変換装置
8日前
株式会社アイシン
発電システム
7日前
株式会社アイシン
車体下部構造
10日前
株式会社アイシン
車両用駆動装置
27日前
株式会社アイシン
減衰力制御装置
13日前
株式会社アイシン
ロータリバルブ
22日前
株式会社アイシン
車両用駆動装置
9日前
株式会社アイシン
車両用駆動装置
27日前
株式会社アイシン
車両用駆動装置
10日前
株式会社アイシン
開閉体制御装置
17日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ