TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025067014
公報種別
公開特許公報(A)
公開日
2025-04-24
出願番号
2023176648
出願日
2023-10-12
発明の名称
車両制御装置
出願人
株式会社アイシン
代理人
弁理士法人ネクスト
主分類
B60G
17/0165 20060101AFI20250417BHJP(車両一般)
要約
【課題】学習対象とすべき路面の種別を限定して学習モデルの学習を行うことで、破滅的忘却による問題を回避することを可能にした車両制御装置を提供する。
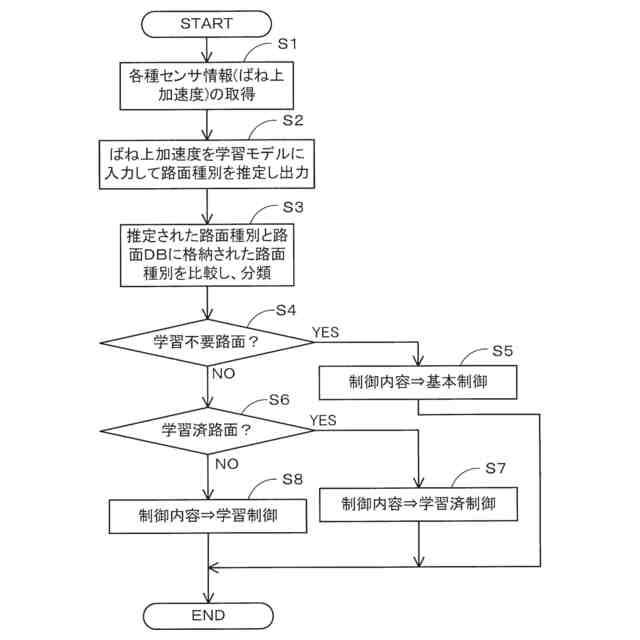
【解決手段】車両の挙動を示す物理量に基づいて車両が走行する路面の種別を推定し、推定された路面の種別が学習対象から除外される路面の種別である場合には、予め設定されたパラメータを用いて車両を制御する為の制御量を算出する一方、推定された路面の種別が学習対象となる路面の種別である場合には、学習によって更新対象となる学習パラメータを用いて車両を制御する為の制御量を算出し、算出された制御量に従って車両の制御を行う。更に、推定された路面の種別が学習対象となる路面の種別である場合には、制御結果に基づいて学習パラメータをより適した値へと更新する学習を行うように構成する。
【選択図】図11
特許請求の範囲
【請求項1】
車両の挙動を示す物理量を取得する車両挙動取得手段と、
前記物理量に基づいて車両が走行する路面の種別を推定する路面種別推定手段と、
前記路面種別推定手段により推定された路面の種別が学習対象から除外される路面の種別である場合に、予め設定されたパラメータを用いて車両を制御する為の制御量を算出する第1制御量算出手段と、
前記路面種別推定手段により推定された路面の種別が学習対象となる路面の種別である場合に、学習によって更新対象となる学習パラメータを用いて車両を制御する為の制御量を算出する第2制御量算出手段と、
前記第1制御量算出手段又は前記第2制御量算出手段により算出された制御量に従って車両の制御を行う車両制御手段と、
前記路面種別推定手段により推定された路面の種別が学習対象となる路面の種別である場合に、制御結果に基づいて前記学習パラメータをより適した値へと更新する学習手段と、を有する車両制御装置。
続きを表示(約 440 文字)
【請求項2】
前記学習対象となる路面の種別は複数あって、
前記学習手段は、路面の種別毎に区分して前記学習パラメータの更新を行うことで路面の種別毎に最適化された前記学習パラメータを導出し、
前記第2制御量算出手段は、車両が走行すると推定された路面の種別に対応した前記学習パラメータを用いて前記制御量を算出する請求項1に記載の車両制御装置。
【請求項3】
前記学習手段は、前記学習対象となる路面の種別の内、前記学習手段による前記学習パラメータの更新が繰り返されることによって所定の収束条件を満たした路面の種別については、前記収束条件を満たした以降について前記学習パラメータの更新を行わない請求項2に記載の車両制御装置。
【請求項4】
前記路面種別推定手段は、ニューラルネットワークを用いた学習モデル、周波数解析、方程式を用いた演算、のいずれかを用いて車両が走行する路面の種別を推定する請求項1乃至請求項3のいずれかに記載の車両制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両の制御を行う車両制御装置に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
車両の乗り心地や走行安定性などを向上させる為に、車両の挙動に応じてサスペンション等の車両が備える各種機構について制御を行うことが従来より行われている。また、より適切な車両制御を行う為に、固定パラメータに基づく制御ではなく、学習モデルを用いて車両の特性や路面の状態を考慮したより適切な制御量を導き出すことについても提案されている。
【0003】
例えば特開2021-109517号公報には、車両の挙動を検出するセンサに加えて路面プロフィール(路面状態)を検出するセンサを備え、実際に車両が走行した際に生じた車両の挙動とその時の路面プロフィールとを時系列に沿って保存し、保存したデータをDNN(Deep Neural Network)の学習モデルで学習させることで、乗り心地が最も良くなるようなサスペンションの制御量を算出する為の学習モデルの学習を行う技術について開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2021-109517号公報(段落0025-0055)
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記特許文献1に開示された学習モデルの学習では、路面状態についても学習の対象となるので、本来であれば学習済みの学習モデルを用いて路面状態毎に適したサスペンションの制御量を算出することが可能となるはずである。しかしながら、従来より知られている学習モデルにおける学習の課題として、学習モデルが学習を継続することによって過去に学習した内容を忘れてしまう“破滅的忘却”が存在し、この“破滅的忘却”によって想定した学習結果が得られないケースが生じていた。
【0006】
この課題について一例をあげて説明すると、一部の地域を除けば基本的に車両は舗装された平坦な路面を走行し、舗装が劣化していたり舗装がされていないような悪路を走行する機会は全体からすればごく僅かである。従って、この破滅的忘却によれば平坦な路面に対する学習を長く継続して行うことで、過去に学習したはずの悪路に対する学習内容を忘れてしまう問題がある。しかしながら、車両の乗り心地や走行安定性などを向上させるという目的を達成する為には、車両への影響の大きい悪路における学習が重要であった。尚、上記例では平坦な路面と悪路を例に挙げたが、大半を占める路面状態での学習によって本当は学習対象としたい一部の路面状態での学習が忘れられてしまうという問題は、それ以外の路面の状態の組み合わせでも同様に起こり得る。更に、サスペンションの制御だけではなく、スタビライザ、後輪操舵、eAxle(イーアクスル)等の他の車両制御の学習においても同様の問題は生じ得る。
【0007】
本発明は前記従来における問題点を解消するためになされたものであり、学習対象とすべき路面の種別を限定して学習モデルの学習を行うことで、破滅的忘却による問題を回避することを可能にした車両制御装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
前記目的を達成するため本発明に係る車両制御装置は、車両の挙動を示す物理量を取得する車両挙動取得手段と、前記物理量に基づいて車両が走行する路面の種別を推定する路面種別推定手段と、前記路面種別推定手段により推定された路面の種別が学習対象から除外される路面の種別である場合に、予め設定されたパラメータを用いて車両を制御する為の制御量を算出する第1制御量算出手段と、前記路面種別推定手段により推定された路面の種別が学習対象となる路面の種別である場合に、学習によって更新対象となる学習パラメータを用いて車両を制御する為の制御量を算出する第2制御量算出手段と、前記第1制御量算出手段又は前記第2制御量算出手段により算出された制御量に従って車両の制御を行う車両制御手段と、前記路面種別推定手段により推定された路面の種別が学習対象となる路面の種別である場合に、制御結果に基づいて前記学習パラメータをより適した値へと更新する学習手段と、を有する。
【発明の効果】
【0009】
前記構成を有する本発明に係る車両制御装置によれば、学習対象とすべき路面の種別を限定して学習モデルの学習を行うことで、破滅的忘却による問題を回避することが可能となる。その結果、大半を占める路面状態での学習によって本当は学習対象としたい一部の路面状態での学習が忘れられてしまうということなく、路面状態毎に適した車両制御が可能となる。
【図面の簡単な説明】
【0010】
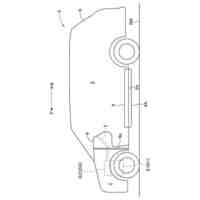
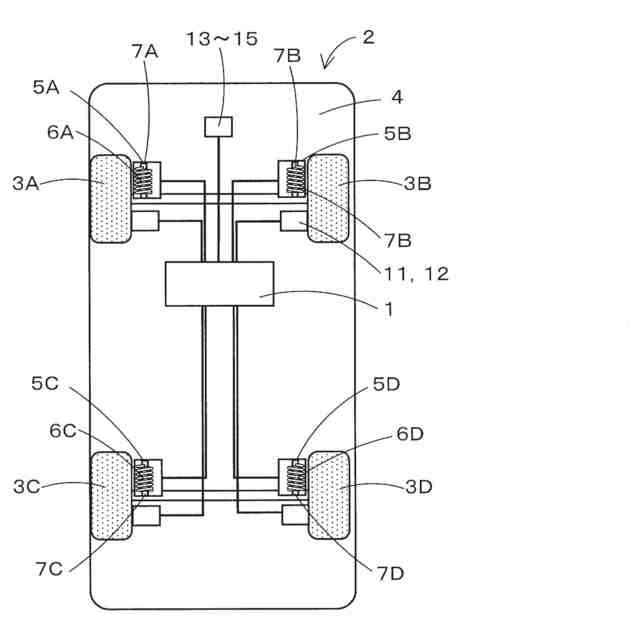
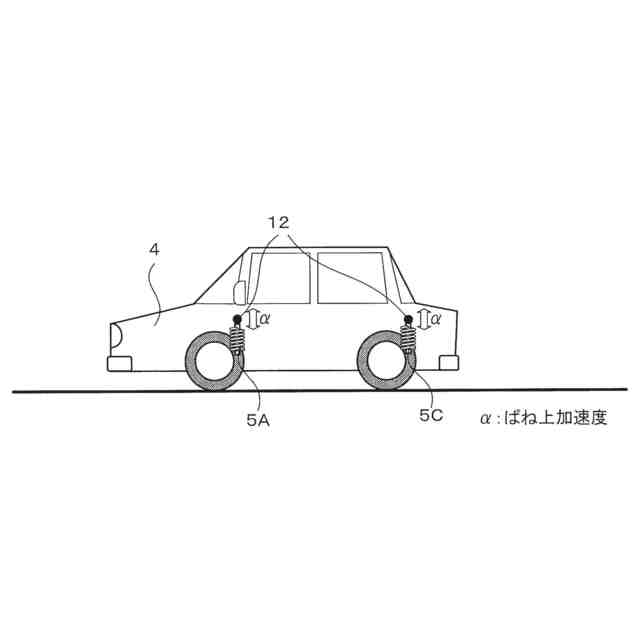
本実施形態に係る車両の概略構成図である。
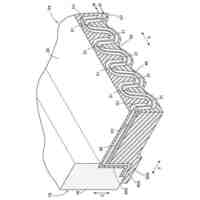
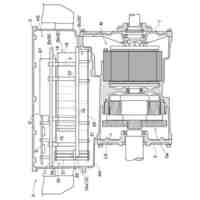
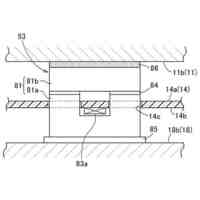
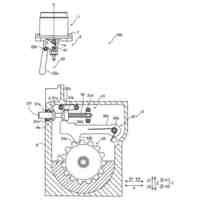
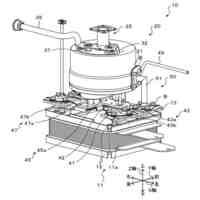
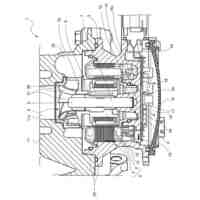
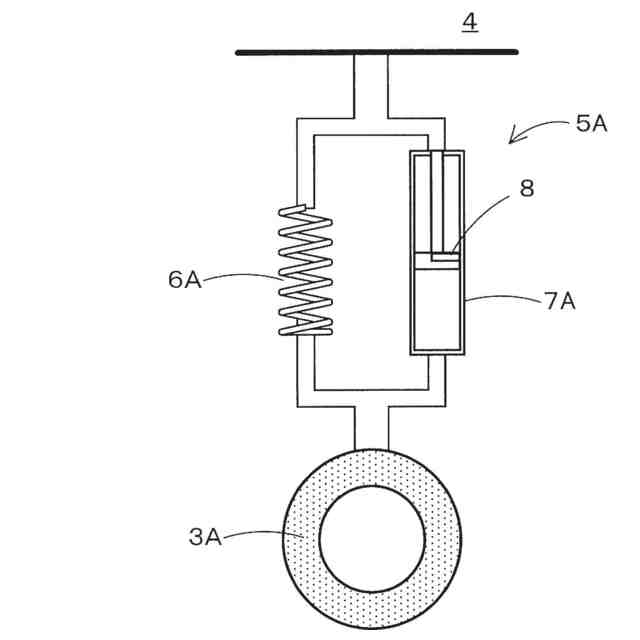
本実施形態に係るサスペンションの概略構成図である。
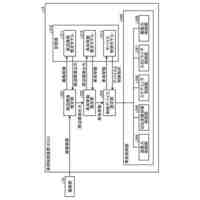
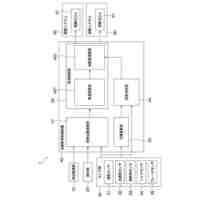
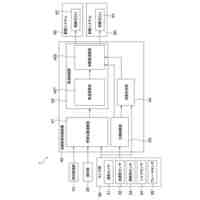
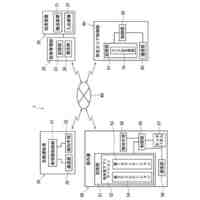
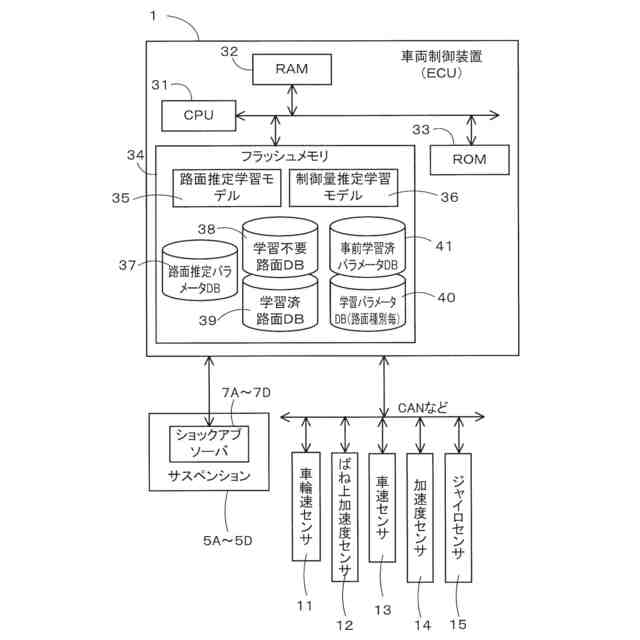
本実施形態に係る車両制御装置の構成を示したブロック図である。
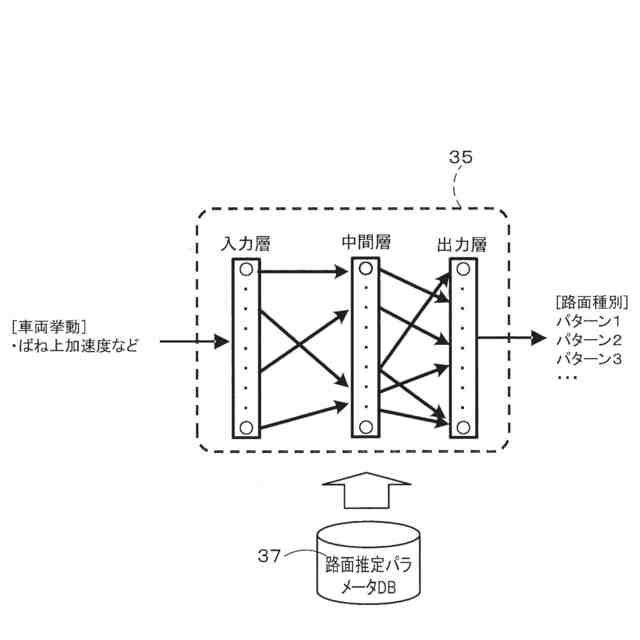
路面推定学習モデルの一例を示した図である。
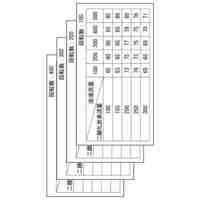
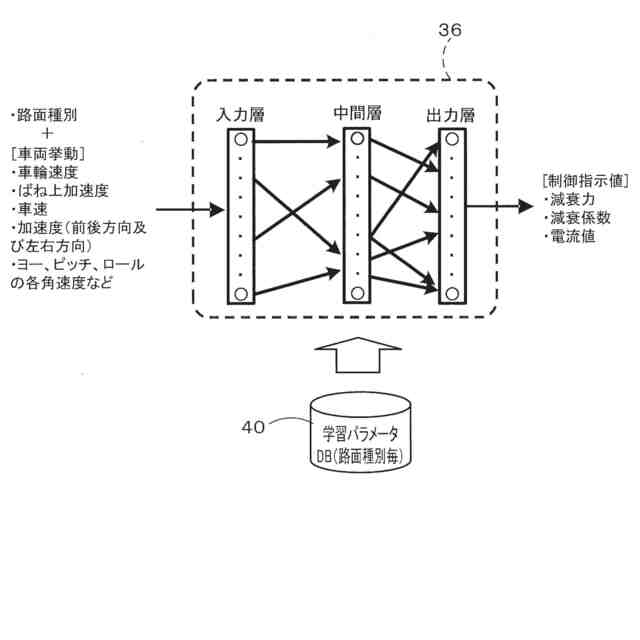
制御量推定学習モデルの一例を示した図である。
“ばね上加速度”について説明した図である。
本実施形態に係る路面推定処理プログラムのフローチャートである。
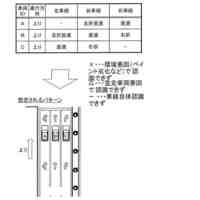
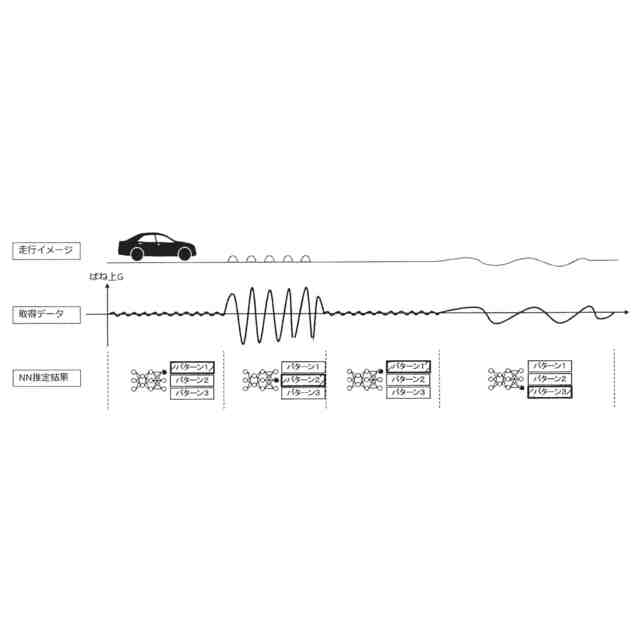
路面推定学習モデルにより路面種別を推定する例を説明した図である。
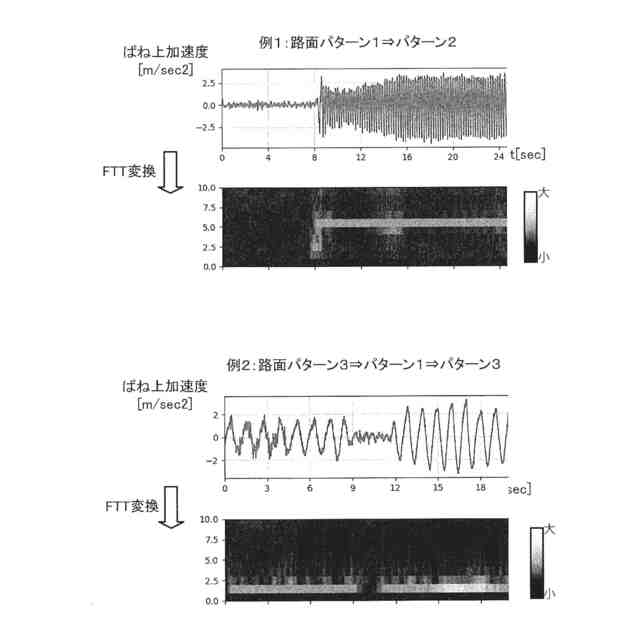
周波数解析により路面種別を推定する例を説明した図である。
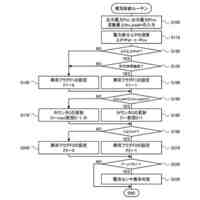
本実施形態に係る車両制御処理プログラムのフローチャートである。
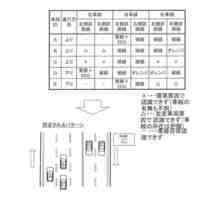
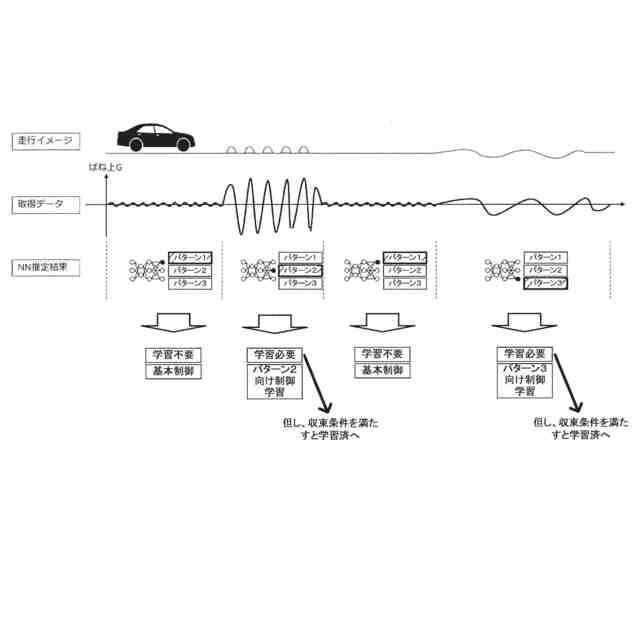
制御量推定学習モデルにより行われる車両制御の例を説明した図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
株式会社アイシン
熱交換器
18日前
株式会社アイシン
電子機器
5日前
株式会社アイシン
シフト装置
12日前
株式会社アイシン
電動ポンプ
5日前
株式会社アイシン
電流センサ
10日前
株式会社アイシン
発電システム
17日前
株式会社アイシン
車両駆動装置
19日前
株式会社アイシン
車両制御装置
13日前
株式会社アイシン
運転支援装置
19日前
株式会社アイシン
電力システム
3日前
株式会社アイシン
電力変換装置
18日前
株式会社アイシン
車体下部構造
20日前
株式会社アイシン
車両用駆動装置
19日前
株式会社アイシン
車両用駆動装置
6日前
株式会社アイシン
重畳画像表示装置
9日前
株式会社アイシン
巻線界磁式回転電機
9日前
株式会社アイシン
二酸化炭素回収装置
13日前
株式会社アイシン
二酸化炭素回収装置
4日前
株式会社アイシン
インダクタの固定構造
18日前
株式会社アイシン
車両用パーキング装置
20日前
株式会社アイシン
地図情報生成システム
17日前
株式会社アイシン
地図情報生成システム
17日前
株式会社アイシン
制御装置及びプログラム
17日前
株式会社アイシン
固体酸化物形セルシステム
19日前
株式会社デンソー
車両用制御装置
12日前
株式会社デンソー
車両用制御装置
12日前
株式会社アイシン
圧入構造とその圧入の良否の判定方法
5日前
トヨタ自動車株式会社
車両の制御装置
17日前
株式会社アイシン
レゾルバロータの固定方法およびレゾルバロータの固定構造
20日前
新明和工業株式会社
自動運転移動システムとその自動運転移動システム用アプリケーション
16日前
個人
カーテント
12日前
個人
警告装置
2か月前
個人
車窓用防虫網戸
1か月前
個人
小型EVシステム
2か月前
個人
車輪清掃装置
16日前
日本精機株式会社
ケース
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ