TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025084472
公報種別
公開特許公報(A)
公開日
2025-06-03
出願番号
2023198401
出願日
2023-11-22
発明の名称
車両用制御装置
出願人
株式会社デンソー
,
株式会社アイシン
,
株式会社ジェイテクト
,
株式会社アドヴィックス
,
株式会社J-QuAD DYNAMICS
代理人
弁理士法人ゆうあい特許事務所
主分類
B60W
30/00 20060101AFI20250527BHJP(車両一般)
要約
【課題】変化発生源の通過の判定精度を向上可能な車両用制御装置を提供すること。
【解決手段】
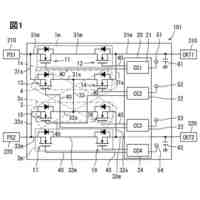
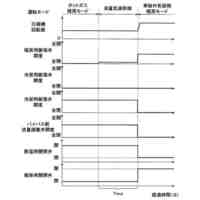
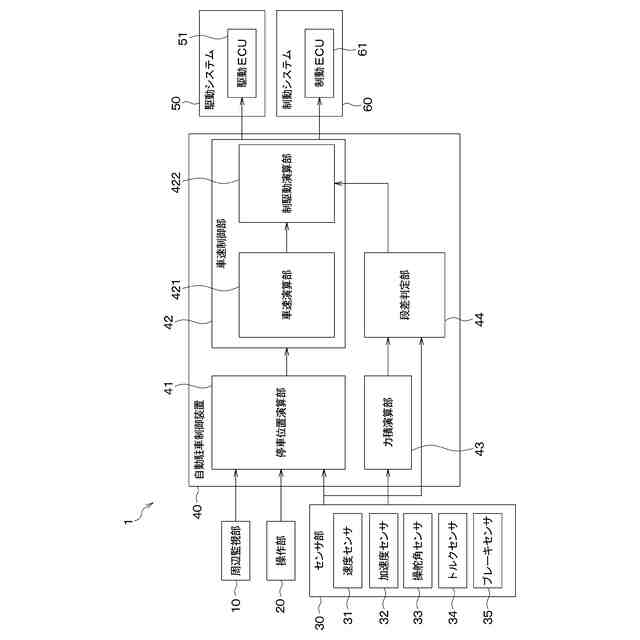
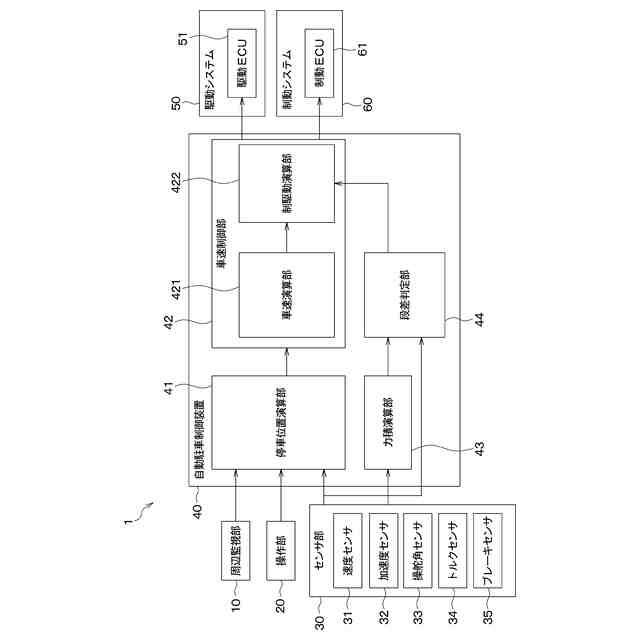
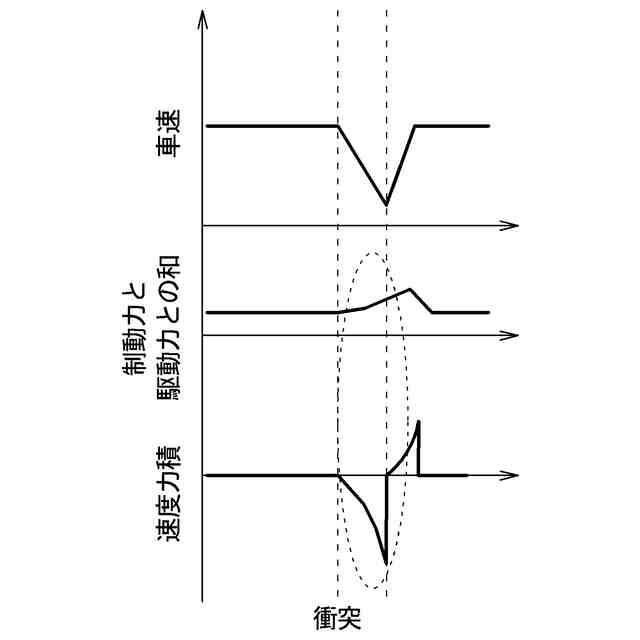
車両の車輪が乗り越え、または、下りることで、車速を変化させる変化発生源Sを通過する車両の駆動力および制動力を制御する車両用制御装置は、車両が変化発生源を通過する際に車両に加わる力積を算出し、算出した力積に対応する力積情報を出力する力積演算部43と、力積演算部が出力する力積情報に基づいて、変化発生源の通過を判定する通過判定部44と、通過判定部の判定結果に基づいて、変化発生源を通過する際の駆動力および制動力を算出する制駆動演算部422と、を備える。力積演算部は、力積情報として、変化発生源を通過する際の車速に基づく速度力積と、変化発生源を通過する際の駆動力および制動力に基づく制駆動力積とを算出する。通過判定部は、力積演算部が算出した速度力積と制駆動力積との差に基づいて変化発生源の通過を判定する。
【選択図】図1
特許請求の範囲
【請求項1】
車両の車輪が乗り越え、または、下りることで、車速を変化させる変化発生源(S)を通過する前記車両の駆動力および制動力を制御する車両用制御装置であって、
前記車両が前記変化発生源を通過する際に前記車両に加わる力積を算出し、算出した力積に対応する力積情報を出力する力積演算部(43)と、
前記力積演算部が出力する前記力積情報に基づいて、前記変化発生源の通過を判定する通過判定部(44)と、
前記通過判定部の判定結果に基づいて、前記変化発生源を通過する際の前記駆動力および前記制動力を算出する制駆動演算部(422)と、を備え、
前記力積演算部は、前記力積情報として、前記変化発生源を通過する際の前記車速に基づく速度力積と、前記変化発生源を通過する際の前記駆動力および前記制動力に基づく制駆動力積とを算出し、
前記通過判定部は、前記力積演算部が算出した前記速度力積と前記制駆動力積との差に基づいて前記変化発生源の通過を判定する車両用制御装置。
続きを表示(約 1,800 文字)
【請求項2】
前記制駆動演算部は、前記車輪が前記変化発生源に接して停車している状態から発進して前記車輪が前記変化発生源へ乗り上げるための前記駆動力および前記制動力を算出し、
前記力積演算部は、前記制駆動演算部が算出する前記駆動力および前記制動力に基づいて前記車輪が前記変化発生源に接して停車している状態から前記車両が発進する際の前記速度力積および前記制駆動力積を算出し、
前記通過判定部は、前記速度力積と前記制駆動力積との差が、前記車輪が前記変化発生源に接している状態であるか否かを判定するための閾値である接触判定閾値以上であるとき、前記車両が前記変化発生源に接していると判定する請求項1に記載の車両用制御装置。
【請求項3】
前記車速を検出し、検出した前記車速に対応する情報を出力する速度検出部(31)を備え、
前記通過判定部は、前記速度検出部が出力する前記車速に対応する情報に基づいて、前記車輪が前記変化発生源に接して停車している状態から前記変化発生源へ乗り上げたことを判定する請求項2に記載の車両用制御装置。
【請求項4】
前記速度検出部は、前記車両の複数の前記車輪に設けられており、
前記通過判定部は、複数の前記速度検出部が出力する前記車速に対応する情報に基づいて、前記車輪が前記変化発生源に接して停車している状態から発進して前記変化発生源へ乗り上げたことを判定する請求項3に記載の車両用制御装置。
【請求項5】
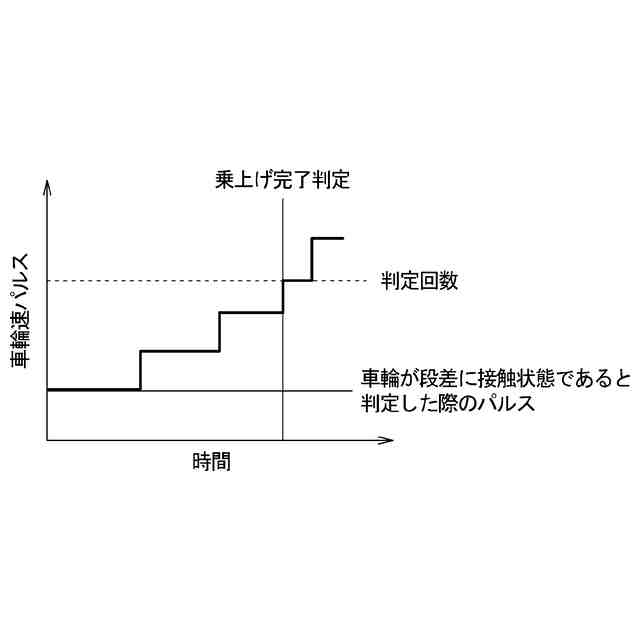
前記速度検出部は、前記車両の前記車輪に設けられており、前記車輪の回転角に応じた数量のパルス信号を出力し、
前記通過判定部は、前記速度検出部から前記パルス信号を複数受信すると、前記車輪が前記変化発生源に接して停車している状態から発進して前記変化発生源へ乗り上げたと判定する請求項3または4に記載の車両用制御装置。
【請求項6】
前記変化発生源が存在する路面の粗さを検出する路面検出部(20、31、32)を備え、
前記通過判定部は、前記路面検出部が検出する前記路面の粗さが粗いほど、前記接触判定閾値を大きな値に変更する請求項2に記載の車両用制御装置。
【請求項7】
前記制駆動演算部は、前記変化発生源が存在する走行路を前記車両が走行するための前記駆動力および前記制動力を算出し、
前記力積演算部は、前記制駆動演算部が算出する前記駆動力および前記制動力に基づいて走行する前記車両の前記車輪が前記変化発生源へ衝突した際の前記速度力積および前記制駆動力積を算出し、
前記通過判定部は、前記速度力積と前記制駆動力積との差が、前記車輪が前記変化発生源に衝突したか否かを判定するための閾値である衝突判定閾値以上であるとき、前記車両の前記車輪が前記変化発生源に衝突したと判定する請求項1に記載の車両用制御装置。
【請求項8】
前記制駆動演算部は、前記車両が前記変化発生源に衝突したと前記通過判定部が判定した後の前記速度力積および前記制駆動力積を算出し、
前記通過判定部は、前記車両が前記変化発生源に衝突したと判定された後の前記制駆動力積が、前記車両が前記変化発生源に衝突したと判定された後の前記速度力積と前記制駆動力積との差以上であるとき、前記車両が前記変化発生源へ乗り上げたと判定する請求項7に記載の車両用制御装置。
【請求項9】
前記変化発生源が存在する路面の粗さを検出する路面検出部(20、31、32)を備え、
前記通過判定部は、前記路面検出部が検出する前記路面の粗さが粗いほど、前記衝突判定閾値を大きな値に変更する請求項7に記載の車両用制御装置。
【請求項10】
前記制駆動演算部は、前記変化発生源が存在する走行路を前記車両が走行するための前記駆動力および前記制動力を算出し、
前記力積演算部は、前記制駆動演算部が算出する前記駆動力および前記制動力に基づいて走行する前記車両の前記車輪が前記変化発生源から下りる際の前記速度力積および前記制駆動力積を算出し、
前記通過判定部は、前記速度力積と前記制駆動力積との差が、前記車輪が前記変化発生源から下りたか否かを判定するための閾値である下り判定閾値以上であるとき、前記車両の前記車輪が前記変化発生源から下りたと判定する請求項1に記載の車両用制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両用制御装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
段差を乗り越えながら車両を発進させる場合、平坦な路面で車両を発進させる場合に比較して大きな駆動力が必要となる。ただし、段差を乗り越えるための大きな駆動力によって段差を乗り越え後に車速が急上昇することを回避するために、段差を乗り越えた後の駆動力は、段差を乗り越える前に比較して抑制される必要がある。
【0003】
このように必要となる駆動力に対して、従来、車両が段差を乗り越えながら発進する場合に、車速の急上昇を抑制する段差乗り越え発進時駆動力制御装置が知られている(例えば、特許文献1参照)。当該制御装置は、車両発進時の車速情報から車輪が段差を乗り越えたことを判定する段差乗り越え終了検知手段を備え、この段差乗り越え終了検知手段が段差を乗り越えたと判定するときの駆動力を抑制する。段差乗り越え終了検知手段は、車速情報を車輪角加速度の移動平均から求め、当該車輪角加速度の移動平均が設定値以上になると、車輪が段差を乗り越えたことを判定する。
【先行技術文献】
【特許文献】
【0004】
特開2007-45230号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
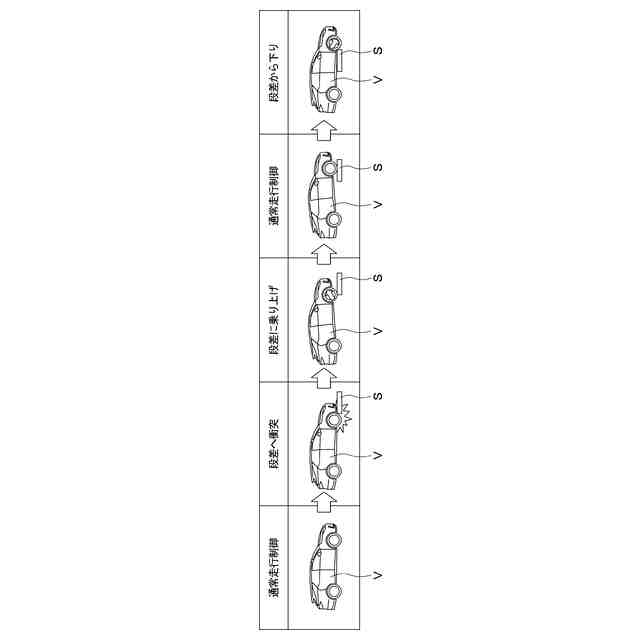
車両が走行する路面に段差が存在する場合、車両は、車輪が段差に衝突すると車速が低下し、段差を乗り越えると段差を乗り越える直前に比較して車速が上昇する虞がある。このため、車両が段差を乗り越えるための駆動力および段差を乗り越えた後の駆動力を車両用制御装置によって制御する場合、それらの駆動力を制御する方法は、特許文献1に記載の制御装置のように、車速の低下に基づいて変化させる方法がある。
【0006】
しかしながら、車両は、走行中に運転者がブレーキ操作を行うと、車速が低下する。このため、車速の情報だけでは、車速の低下が車輪の段差への衝突に起因するものか、運転者によるブレーキ操作に起因するものかを判別することが難しい。このため、例えば、車速の情報に基づいて段差への乗り越え完了を判定すると、段差への乗り越え完了を誤判定する虞がある。そして、段差を乗り越えたとする誤判定結果に基づいて車両用制御装置が駆動力を制御すると、駆動力を適切に制御することができない虞がある。
【0007】
このように、段差のような車速を変化させる変化発生源が存在する路面を車両が走行する場合において、当該変化発生源の通過を車速に基づいて判定する方法では、変化発生源の通過を精度良く判定することが難しい。すなわち、車両用制御装置が変化発生源の通過を車速に基づいて判定すると、変化発生源を通過する際の駆動力を適切に制御できない虞がある。
【0008】
上記点に鑑みて、本開示は、変化発生源の通過の判定精度を向上可能な車両用制御装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
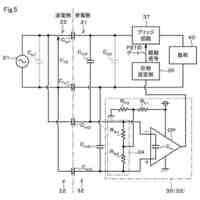
本開示の1つの観点によれば、
車両の車輪が乗り越え、または、下りることで、車速を変化させる変化発生源(S)を通過する車両の駆動力および制動力を制御する車両用制御装置は、
車両が変化発生源を通過する際に車両に加わる力積を算出し、算出した力積に対応する力積情報を出力する力積演算部(43)と、
力積演算部が出力する力積情報に基づいて、変化発生源の通過を判定する通過判定部(44)と、
通過判定部の判定結果に基づいて、変化発生源を通過する際の駆動力および制動力を算出する制駆動演算部(422)と、を備え、
力積演算部は、力積情報として、変化発生源を通過する際の車速に基づく速度力積と、変化発生源を通過する際の駆動力および制動力に基づく制駆動力積とを算出し、
通過判定部は、力積演算部が算出した速度力積と制駆動力積との差に基づいて変化発生源の通過を判定する。
【0010】
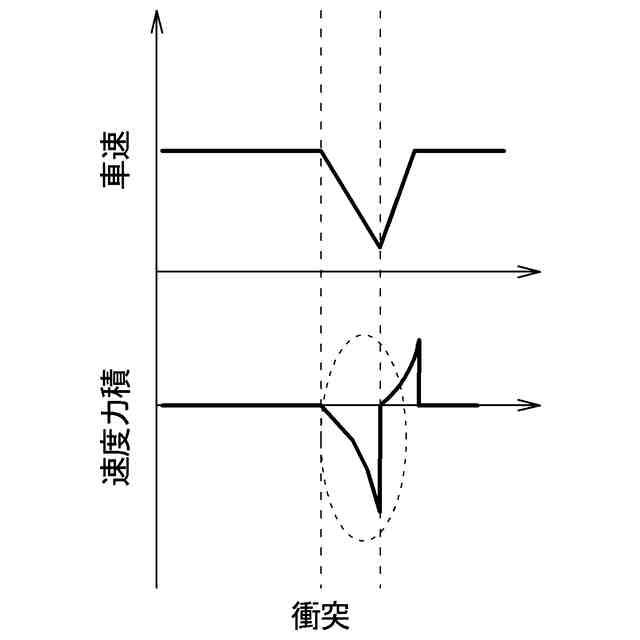
発明者らの鋭意検討によって、変化発生源を通過する際に車速が変化する場合、速度力積と制駆動力積との間に差が生じることが見いだされた。このため、通過判定部が速度力積と制駆動力積との差に基づいて変化発生源の通過を判定することで、車速の変化に基づいて変化発生源の通過を判定する場合に比較して変化発生源の通過を精度良く判定することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
電子装置
9日前
株式会社デンソー
受電装置
1日前
株式会社デンソー
検出装置
今日
株式会社デンソー
電気装置
9日前
株式会社デンソー
熱交換器
3日前
株式会社デンソーウェーブ
決済端末
2日前
株式会社デンソー
電流センサ
7日前
株式会社デンソー
圧電センサ
2日前
株式会社デンソー
レーダ装置
今日
株式会社デンソー
半導体装置
今日
株式会社デンソー
電源切替回路
7日前
株式会社デンソーウェーブ
情報読取装置
今日
株式会社デンソー
差動通信回路
8日前
株式会社デンソー
電子制御装置
7日前
株式会社デンソー
燃料噴射装置
1日前
株式会社デンソー
状態推定装置
7日前
株式会社デンソー
コイルユニット
7日前
株式会社デンソー
データ処理装置
1日前
株式会社デンソー
ブラシレスモータ
3日前
株式会社デンソー
圧縮機モジュール
8日前
株式会社デンソー
マイクロホン装置
8日前
株式会社デンソー
回転電機のステータコア
8日前
株式会社デンソー
ヒートポンプサイクル装置
8日前
株式会社デンソーウェーブ
携帯端末及び管理システム
3日前
株式会社デンソー
慣性センサおよびその製造方法
8日前
株式会社デンソー
方位推定装置および方位推定方法
今日
ダイハツ工業株式会社
恒温装置
7日前
トヨタ自動車株式会社
判定装置
2日前
株式会社デンソー
半導体装置及び半導体装置の製造方法
7日前
トヨタ自動車株式会社
車両制御装置
3日前
トヨタ自動車株式会社
映像表示装置
3日前
株式会社デンソー
デルタシグマA/D変換器及び電池監視装置
2日前
株式会社デンソーテン
治具、アライメント装置、および端子挿入方法
8日前
株式会社デンソーテン
提供装置、搬送ロボット、及び物品搬送システム
1日前
株式会社デンソー
データ保存装置、移動体、及びデータ保存プログラム
3日前
トヨタ自動車株式会社
運転支援システムの制御装置
7日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ