TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025093204
公報種別
公開特許公報(A)
公開日
2025-06-23
出願番号
2023208803
出願日
2023-12-11
発明の名称
車両制御装置
出願人
トヨタ自動車株式会社
,
株式会社デンソー
,
株式会社J-QuAD DYNAMICS
代理人
弁理士法人プロスペック特許事務所
主分類
B60W
30/08 20120101AFI20250616BHJP(車両一般)
要約
【課題】減速制御の終了後に衝突可能性が再び高まった場合に適切に対応することができるように、減速制御の制御終了条件を設定する。
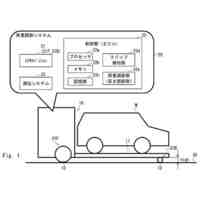
【解決手段】車両制御装置(1A,1B,1C)は、自車両(100)を制動する制動装置(40)と、自車両(100)と自車両(100)の進行方向に存在する物標である先行物標(OB)との衝突可能性が高いと判断した場合に自車両(100)が減速するように制動装置(40)を制御する減速制御を開始し、減速制御の実行中に所定の制御終了条件が成立した場合に減速制御を終了するように構成された制御装置(10)と、を備える。そして、制御終了条件は、減速制御を終了した後における自車両(100)と先行物標(OB)との衝突を回避するための余裕の大きさを表す余裕度が所定の閾値余裕度以上であるときに成立する余裕度条件を含む。
【選択図】 図6
特許請求の範囲
【請求項1】
自車両を制動する制動装置と、
前記自車両と前記自車両の進行方向に存在する物標である先行物標との衝突可能性が高いと判断した場合に前記自車両が減速するように前記制動装置を制御する減速制御を開始し、前記減速制御の実行中に所定の制御終了条件が成立した場合に前記減速制御を終了するように構成された制御装置と、
を備える車両制御装置であって、
前記制御終了条件は、前記減速制御を終了した後における前記自車両と前記先行物標との衝突を回避するための余裕の大きさを表す余裕度が所定の閾値余裕度以上であるときに成立する余裕度条件を含む、
車両制御装置。
続きを表示(約 1,500 文字)
【請求項2】
請求項1に記載の車両制御装置であって、
前記制御装置は、前記減速制御の実行中に、前記先行物標の加速度が所定の閾値加速度以上であるときに成立する加速度条件が成立した場合に、前記余裕度条件が成立したと判断する、
車両制御装置。
【請求項3】
請求項1に記載の車両制御装置であって、
前記制御装置は、前記減速制御の実行中に、前記自車両と前記先行物標との間の相対距離が所定の閾値距離以上であるときに成立する相対距離条件が成立した場合に、前記余裕度条件が成立したと判断する、
車両制御装置。
【請求項4】
請求項1に記載の車両制御装置であって、
前記制御装置は、前記減速制御の実行中に、前記自車両の減速度を0とした場合に前記自車両が前記先行物標に到達するまでに要する予測時間が閾値時間以上であるときに成立する予測時間条件が成立した場合に、前記余裕度条件が成立したと判断する、
車両制御装置。
【請求項5】
自車両を制動する制動装置と、
前記自車両と前記自車両の進行方向に存在する物標である先行物標との衝突可能性が高いと判断した場合に前記自車両が減速するように前記制動装置を制御する減速制御を開始し、前記減速制御の実行中に所定の制御終了条件が成立した場合に前記減速制御を終了するように構成された制御装置と、
を備える車両制御装置であって、
前記制御装置は、
前記減速制御の実行中に、前記自車両の速度と前記先行物標の速度との関係が前記自車両と前記先行物標との衝突の回避が可能である関係にあるときに成立する相対速度条件が成立し、且つ、前記減速制御を終了した後における前記自車両と前記先行物標との衝突を回避するための余裕の大きさを表す余裕度が所定の閾値余裕度以上であるときに成立する余裕度条件が成立した場合に、前記制御終了条件が成立したと判断する、
車両制御装置。
【請求項6】
請求項5に記載の車両制御装置であって、
前記制御装置は、前記減速制御の実行中に、前記先行物標の加速度が所定の閾値加速度以上であるときに成立する加速度条件が成立した場合に、前記余裕度条件が成立したと判断する、
車両制御装置。
【請求項7】
請求項5に記載の車両制御装置であって、
前記制御装置は、前記減速制御の実行中に、前記自車両と前記先行物標との間の相対距離が所定の閾値距離以上であるときに成立する相対距離条件が成立した場合に、前記余裕度条件が成立したと判断する、
車両制御装置。
【請求項8】
請求項5に記載の車両制御装置であって、
前記制御装置は、前記減速制御の実行中に、前記自車両の減速度を0とした場合に前記自車両が前記先行物標に到達するまでに要する予測時間が閾値時間以上であるときに成立する予測時間条件が成立した場合に、前記余裕度条件が成立したと判断する、
車両制御装置。
【請求項9】
請求項5に記載の車両制御装置であって、
前記制御装置は、前記減速制御の実行中に、前記自車両の速度が前記先行物標の速度を所定速度以上下回る場合に、前記相対速度条件が成立すると判断する、
車両制御装置。
【請求項10】
請求項9に記載の車両制御装置であって、
前記制御装置は、前記相対速度条件が成立し、前記先行物標の速度が所定の下限速度以上であるときに成立する物標速度条件が成立し、且つ、前記余裕度条件が成立する場合に、前記制御終了条件が成立すると判断する、
車両制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、減速制御を実行可能な車両制御装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
特許文献1は、減速制御を実行可能な車両制御装置を開示する。特許文献1に開示された車両制御装置は、自車両と自車両の進行方向に存在する物標(以下、先行物標と称呼する)との衝突可能性が高いと判断した場合に、制動装置を作動させて自車両を減速する減速制御を開始する。この減速制御は所定の制御終了条件が成立した場合に終了する。特許文献1には、所定の制御終了条件として、自車両の速度が先行物標の速度を下回るという条件が例示される。
【先行技術文献】
【特許文献】
【0003】
特開2016-1498号公報
【発明の概要】
【0004】
特許文献1に係る車両制御装置は、自車両と先行物標との衝突可能性が高いと判断した場合に減速制御を開始し、減速制御の実行中に自車両の速度が先行物標の速度を下回った場合に減速制御を終了する。この場合、先行物標の挙動により減速制御が終了した後に自車両と先行物標との衝突可能性が再び高まる可能性がある。特許文献1に係る車両制御装置によれば、減速制御の終了後に衝突可能性が再び高まった場合における対応を考慮していないため、減速制御の制御終了条件の設定に改善の余地がある。
【0005】
本開示は、上記した課題を解決し得る車両制御装置を提供することを目的とする。
【0006】
本開示に係る車両制御装置(1A,1B,1C)は、自車両(100)を制動する制動装置(40)と、自車両(100)と自車両(100)の進行方向に存在する物標である先行物標(OB)との衝突可能性が高いと判断した場合に自車両(100)が減速するように制動装置(40)を制御する減速制御を開始し、減速制御の実行中に所定の制御終了条件が成立した場合に減速制御を終了するように構成された制御装置(10)と、を備える。そして、制御終了条件は、減速制御を終了した後における自車両(100)と先行物標(OB)との衝突を回避するための余裕の大きさを表す余裕度が所定の閾値余裕度以上であるときに成立する余裕度条件を含む。
【0007】
本開示に係る車両制御装置によれば、減速制御を終了した後における自車両と先行物標との衝突を回避する余裕がある場合に減速制御が終了される。このため減速制御の終了後に自車両と先行物標との衝突可能性が再び高まったとしても、余裕を持って自車両と先行物標との衝突を回避することができる。
【0008】
また、本開示に係る車両制御装置は、自車両(100)を制動する制動装置(40)と、自車両(100)と自車両(100)の進行方向に存在する物標である先行物標(OB)との衝突可能性が高いと判断した場合に自車両(100)が減速するように制動装置(40)を制御する減速制御を開始し、減速制御の実行中に所定の制御終了条件が成立した場合に減速制御を終了するように構成された制御装置(10)と、を備える。そして、制御装置(10)は、減速制御の実行中に、自車両(100)の速度と先行物標(OB)の速度との関係が自車両(100)と先行物標(OB)との衝突の回避が可能である関係にあるときに成立する相対速度条件が成立し、且つ、減速制御を終了した後における自車両(100)と先行物標(OB)との衝突を回避するための余裕の大きさを表す余裕度が所定の閾値余裕度以上であるときに成立する余裕度条件が成立した場合に、制御終了条件が成立したと判断する。
【0009】
本開示に係る車両制御装置によれば、制御装置は、減速制御の実行中に、自車両の速度と先行物標の速度との関係が、自車両と先行物標との衝突の回避が可能である関係にあり、且つ、減速制御を終了した後においても自車両と先行物標との衝突を回避する余裕がある場合に減速制御が終了される。このため、減速制御の終了後に自車両と先行物標との衝突可能性が再び高まった場合であっても、余裕を持って自車両と先行物標との衝突を回避することができる。
【0010】
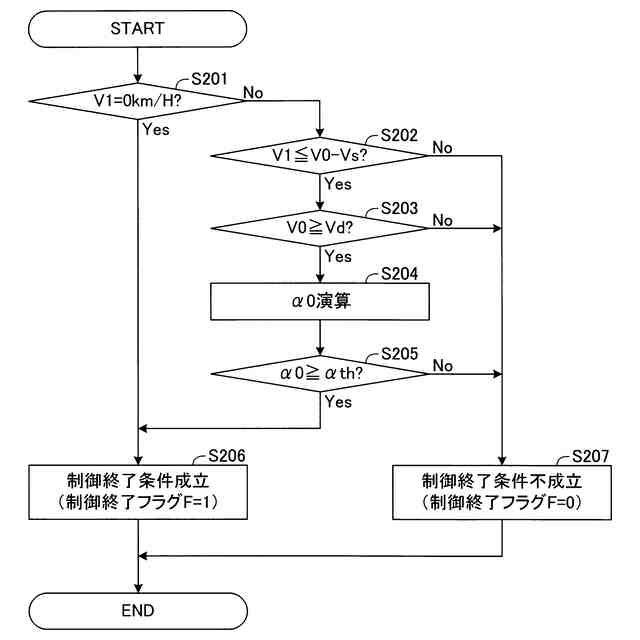
本開示に係る車両制御装置の一態様において、制御装置(10)は、減速制御の実行中に、先行物標(OB)の加速度(α0)が所定の閾値加速度(αth)以上であるときに成立する加速度条件が成立した場合に、余裕度条件が成立したと判断する。すなわち、加速度条件が余裕度条件であり、先行物標(OB)の加速度(α0)が余裕度である。よって、この態様によれば、減速制御の制御終了条件は、先行物標(OB)の加速度(α0)が所定の閾値加速度(αth)以上であるときに成立する加速度条件を含む。この場合、先行物標(OB)の加速度(α0)は、先行物標(OB)の進行方向(前後方向)に作用する加速度(縦加速度)であっても良い。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
カーテント
20日前
個人
警告装置
2か月前
個人
車窓用防虫網戸
1か月前
個人
小型EVシステム
2か月前
個人
車輪清掃装置
24日前
日本精機株式会社
ケース
2か月前
個人
キャンピングトライク
7日前
井関農機株式会社
作業車両
14日前
井関農機株式会社
作業車両
12日前
個人
ワイパーゴム性能保持具
1か月前
個人
キャンピングトレーラー
7日前
株式会社クラベ
ヒータユニット
1か月前
個人
自動車ドア開度規制ベルト
2か月前
井関農機株式会社
収穫作業車両
1か月前
株式会社ユーシン
照明装置
1か月前
トヨタ自動車株式会社
車両
11日前
帝国繊維株式会社
作業車両
2か月前
日本精機株式会社
車両用投影装置
14日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
作業車両
1か月前
日本精機株式会社
車両用投影装置
14日前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用表示装置
1か月前
井関農機株式会社
作業車両
4日前
エムケー精工株式会社
車両処理装置
1か月前
豊田合成株式会社
乗員保護装置
6日前
トヨタ自動車株式会社
運搬車両
5日前
スズキ株式会社
車体構造
2か月前
スズキ株式会社
車両の制御装置
1か月前
ダイハツ工業株式会社
車両構造
今日
ダイハツ工業株式会社
車両構造
2か月前
ダイハツ工業株式会社
車両構造
2か月前
ダイハツ工業株式会社
積載装置
4日前
AGC株式会社
車両用窓ガラス
今日
AGC株式会社
車両用窓ガラス
27日前
AGC株式会社
車両用窓ガラス
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ