TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024158183
公報種別
公開特許公報(A)
公開日
2024-11-08
出願番号
2023073166
出願日
2023-04-27
発明の名称
駐車支援装置
出願人
株式会社アイシン
代理人
弁理士法人ネクスト
主分類
B60R
99/00 20090101AFI20241031BHJP(車両一般)
要約
【課題】障害物により走行不可能な走行軌道が生成されることなく、より適切な走行軌道を生成することを可能にした駐車支援装置を提供する。
【解決手段】駐車開始位置及び駐車目標位置を取得し、駐車開始位置から駐車目標位置までの走行軌道を生成する場合において、駐車開始位置にある被牽引車3に対して駐車目標位置側の側方にある障害物を、駐車を行う際に影響する障害物として検出し、駐車開始位置にある被牽引車3から障害物までの距離を取得し、駐車開始位置にある被牽引車3から障害物までの距離に基づいて被牽引車3の走行軌道が障害物と重複しない条件を満たすか否かを判定し、条件を満たす範囲で経路長が短くなることを優先して前進区間の走行軌道を生成するように構成する。
【選択図】図9
特許請求の範囲
【請求項1】
牽引車と前記牽引車により牽引される対象となる被牽引車とが連結された状態において前記牽引車と前記被牽引車の駐車を支援する駐車支援装置であって、
駐車開始位置を取得する駐車開始位置取得部と、
駐車目標位置を取得する駐車目標位置取得部と、
前記駐車開始位置から前記駐車目標位置までの走行軌道を生成する走行軌道生成部と、
前記駐車開始位置にある前記被牽引車に対して前記駐車目標位置側の側方にある障害物を、駐車を行う際に影響する障害物として検出する障害物検出部と、
前記駐車開始位置にある前記被牽引車に対する前記障害物の位置又は前記障害物までの距離を取得する障害物情報取得部と、を有し、
前記走行軌道は、前記駐車開始位置から前記駐車目標位置と離間する方向に旋回しつつ前進する前進区間と、前記前進区間の走行軌道上で切り返した後に前記駐車目標位置まで後退する後退区間と、を含み、
前記走行軌道生成部は、
前記駐車開始位置にある前記被牽引車に対する前記障害物の位置又は前記障害物までの距離に基づいて前記被牽引車の走行軌道が前記障害物と重複しない条件を満たすか否かを判定し、
前記条件を満たす範囲で経路長が短くなるように前記前進区間の走行軌道を生成する駐車支援装置。
続きを表示(約 780 文字)
【請求項2】
前記被牽引車の回転中心から前記牽引車と前記被牽引車との連結点までの距離をトレーラホイールベースとして取得するトレーラホイールベース取得部と、
前記牽引車の後輪軸から前記連結点までの距離である連結距離を取得する連結距離取得部と、を有し、
前記走行軌道生成部は、
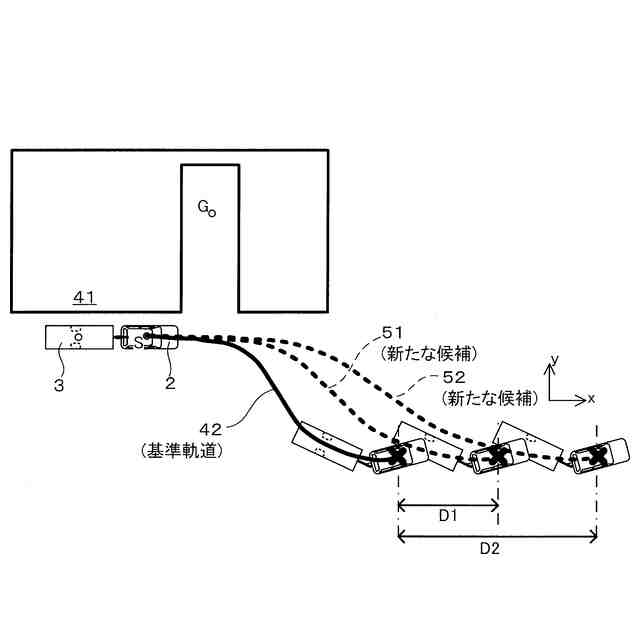
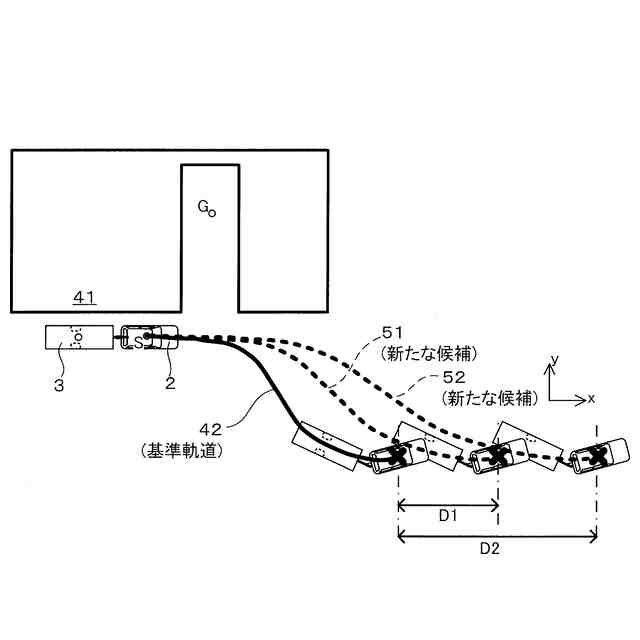
前記前進区間の前記牽引車の走行軌道の候補として旋回時の曲率が異なる複数の候補を生成し、
前記複数の候補毎に該候補を前記牽引車が走行する際の前記被牽引車の走行軌道を前記トレーラホイールベースと前記連結距離とに基づいて算出し、
算出された前記被牽引車の走行軌道が前記障害物と重複しない候補の内で経路長が最も短くなる候補を選択して、前記前進区間の走行軌道として生成する請求項1に記載の駐車支援装置。
【請求項3】
前記走行軌道生成部は、
前記障害物を考慮しない前記前進区間の走行軌道である基準軌道を取得し、
前記基準軌道が前記条件を満たす場合には、前記基準軌道を前記前進区間の走行軌道として生成し、
前記基準軌道が前記条件を満たさない場合に、前記前進区間の前記牽引車の走行軌道の候補として前記基準軌道よりも旋回時の曲率を小さくした前記複数の候補を生成する請求項2に記載の駐車支援装置。
【請求項4】
前記走行軌道は、前記前進区間と前記後退区間に加えて、前記駐車開始位置から直進方向に所定距離だけ後方に後退することで前記駐車開始位置を調整する初期後退区間を更に含み、
前記所定距離は、前記駐車目標位置に後退可能な切り返し位置を前記前進区間の走行軌道上に位置させる為に前記駐車開始位置を後方に移動させる必要がある最短の距離とする請求項1乃至請求項3のいずれかに記載の駐車支援装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両の駐車支援を行う駐車支援装置に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
従来より車両の駐車支援として駐車する際の走行軌道を算出して、算出した走行軌道に従って駐車が行われるように案内や車両制御を行うことが知られている。ここで、特に後退駐車を行う場合の走行軌道は、駐車スペースなどの駐車目標とする駐車目標位置に対して進入するのに適切な切り返し位置まで一旦前進し、切り返し位置で後退に切り替えて駐車目標位置まで後退する走行軌道となるが、被牽引車(トレーラ)を牽引した牽引車(トラクタ)に対して上記駐車支援を行う際には、牽引車の挙動だけではなく被牽引車の挙動についても考慮して上記走行軌道を設定する必要があった。
【0003】
例えば特開2022-107175号公報には駐車開始位置と駐車目標位置と障害物の位置から牽引車が被牽引車を牽引した状態で駐車を行う場合の牽引車と被牽引車の目標経路を生成した後に、生成された被牽引車の目標経路の最大曲率が被牽引車の旋回可能な最大曲率以下となっているかを判定し、被牽引車の旋回可能な最大曲率以下となっていない場合には切り返し位置を再設定して目標経路を修正する技術について提案されている。
【先行技術文献】
【特許文献】
【0004】
特開2022-107175号公報(段落0059-0060)
【発明の概要】
【発明が解決しようとする課題】
【0005】
ここで、図12は被牽引車を牽引する牽引車が旋回しながら前進する際の車両の軌跡を示した図であるが、図12に示すように牽引車と被牽引車が直線上或いはそれに近い状態から右(或いは左)に旋回した場合に被牽引車が旋回方向と逆方向にわずかに膨らむことが知られている。従って、上記切り返しを伴う駐車を行う場合において、図13に示すように駐車開始位置にある被牽引車101に対して駐車目標位置102側の側方に壁などの障害物103があると、切り返し位置までの前進区間において被牽引車101がそれらの障害物103と接触する虞が生じる。
【0006】
上記特許文献1は被牽引車の目標経路の曲率については考慮しているが、上記のような膨らみに伴う障害物との接触の可能性については何ら考慮されていなかった。その結果、障害物の位置又は障害物までの距離によっては障害物により走行不可能な目標経路が設定される虞があった。
【0007】
本発明は前記従来における問題点を解消するためになされたものであり、特に駐車開始位置にある被牽引車に対して駐車目標位置側の側方に存在する障害物を考慮して前進区間の走行軌道を算出することで、障害物により走行不可能な走行軌道が生成されることなく、より適切な走行軌道を生成することを可能にした駐車支援装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
前記目的を達成するため本発明に係る駐車支援装置は、牽引車と前記牽引車により牽引される対象となる被牽引車とが連結された状態において前記牽引車と前記被牽引車の駐車を支援する駐車支援装置であって、駐車開始位置を取得する駐車開始位置取得部と、駐車目標位置を取得する駐車目標位置取得部と、前記駐車開始位置から前記駐車目標位置までの走行軌道を生成する走行軌道生成部と、前記駐車開始位置にある前記被牽引車に対して前記駐車目標位置側の側方にある障害物を、駐車を行う際に影響する障害物として検出する障害物検出部と、前記駐車開始位置にある前記被牽引車に対する前記障害物の位置又は前記障害物までの距離を取得する障害物情報取得部と、を有し、前記走行軌道は、前記駐車開始位置から前記駐車目標位置と離間する方向に旋回しつつ前進する前進区間と、前記前進区間の走行軌道上で切り返した後に前記駐車目標位置まで後退する後退区間と、を含み、前記走行軌道生成部は、前記駐車開始位置にある前記被牽引車に対する前記障害物の位置又は前記障害物までの距離に基づいて前記被牽引車の走行軌道が前記障害物と重複しない条件を満たすか否かを判定し、前記条件を満たす範囲で経路長が短くなるように前記前進区間の走行軌道を生成する。
尚、“走行軌道が障害物と重複する”とは障害物が位置する範囲と走行軌道とが重なる場合に加えて、走行軌道に沿って車両が走行した場合に障害物が位置する範囲と車両とが重なる場合も走行軌道と障害物とが重複するとみなす。
【発明の効果】
【0009】
前記構成を有する本発明に係る駐車支援装置によれば、駐車開始位置にある被牽引車に対して駐車目標位置側の側方に存在する障害物を考慮して前進区間の走行軌道を算出することで、障害物により走行不可能な走行軌道が生成されることなく、より適切な走行軌道を生成することが可能となる。
【図面の簡単な説明】
【0010】
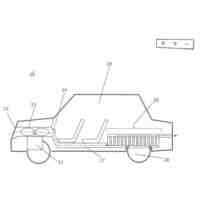
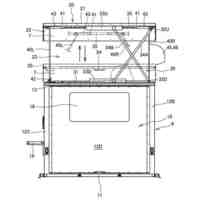
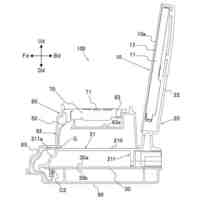
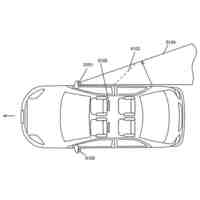
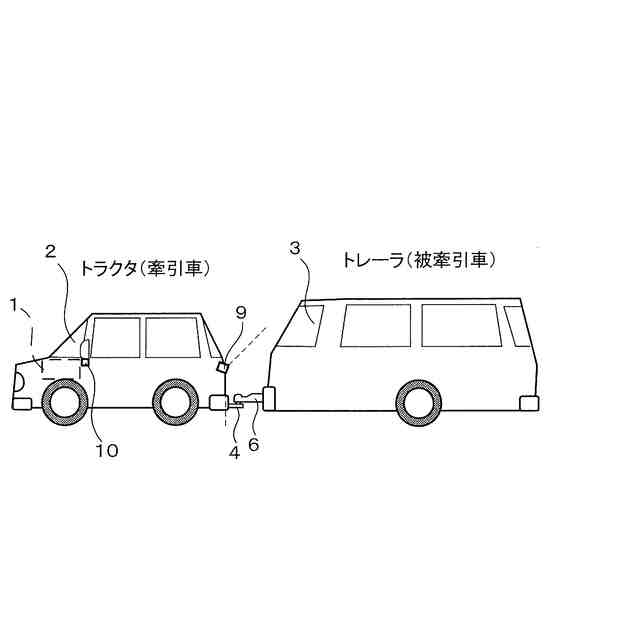
本実施形態に係る牽引車及び被牽引車を示した図である。
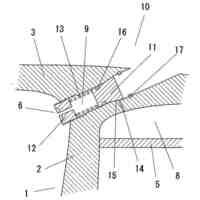
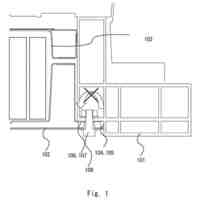
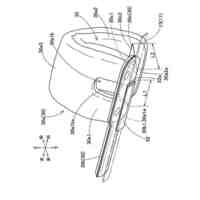
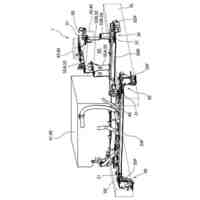
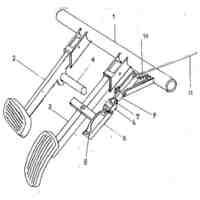
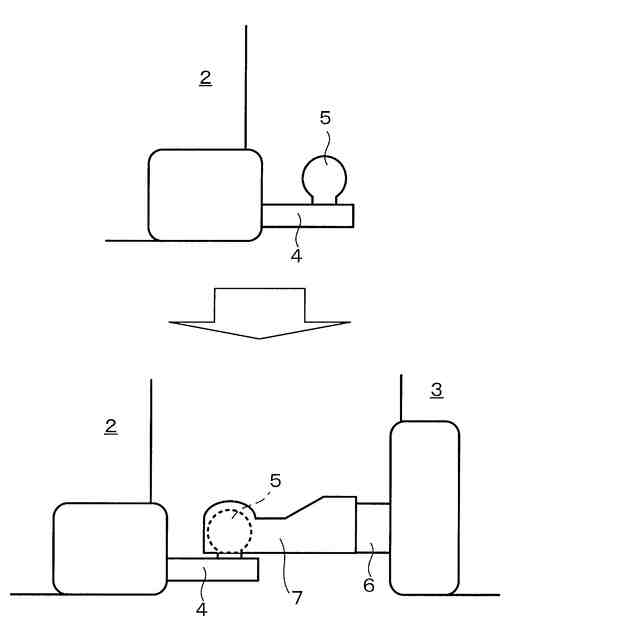
牽引車の牽引装置付近を拡大して示した図である。
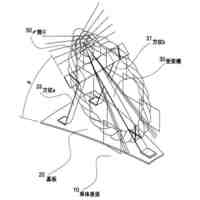
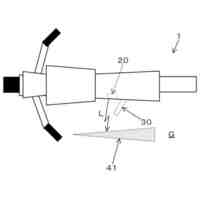
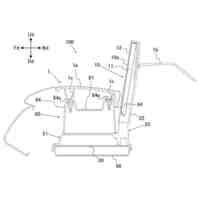
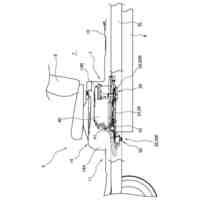
ヒッチボールとカプラーとを接続した状態での牽引車と被牽引車の動きを示した図である。
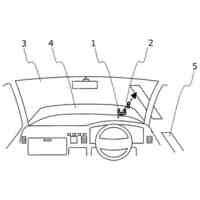
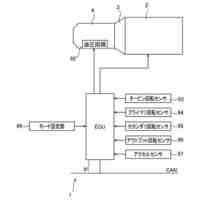
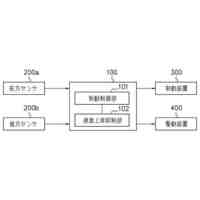
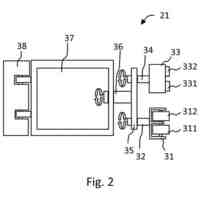
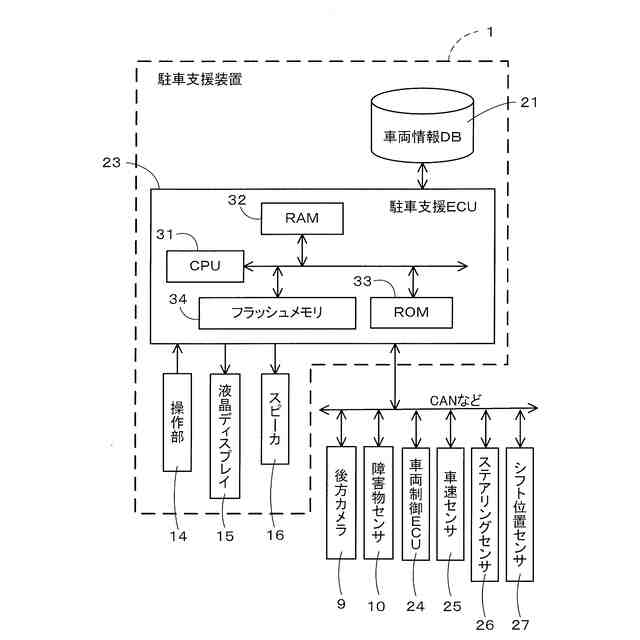
本実施形態に係る駐車支援装置の構成を示したブロック図である。
本実施形態に係る駐車支援処理プログラムのフローチャートである。
駐車を行う際に影響する障害物の例を示した図である。
障害物を考慮せずに生成した基準軌道の例を示した図である。
前進軌道に従って走行した場合の膨らみ量を示した図である。
新たに生成される前進軌道の候補を示した図である。
初期後退距離の算出方法について説明した図である。
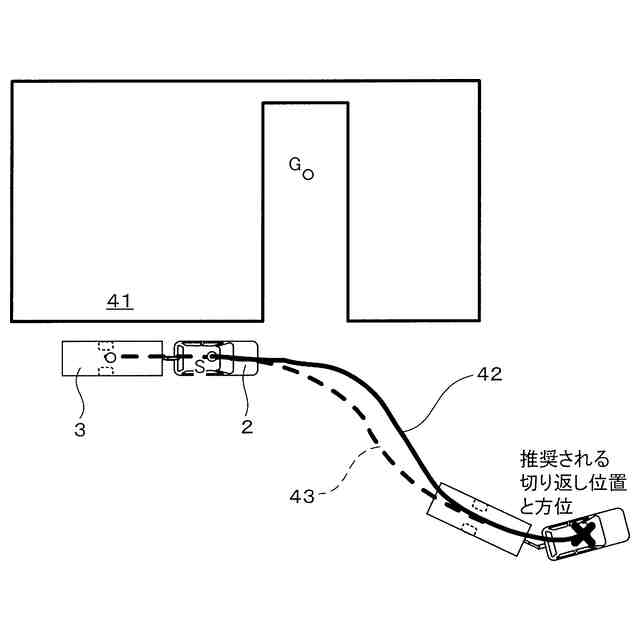
各軌道を組み合わせることにより生成される駐車開始位置から駐車目標位置までの推奨される走行軌道を示した図である。
従来技術の問題点について説明した図である。
従来技術の問題点について説明した図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
車両
14日前
個人
自動車運転補助装置
7日前
個人
空気圧調節式ホイール。
1か月前
エムケー精工株式会社
洗車装置
1か月前
日本精機株式会社
車載表示装置
6日前
東レ株式会社
車両用エアバッグ
2か月前
日本精機株式会社
車外表示装置
1か月前
個人
自動車外部装着用しめ飾り
7日前
日本精機株式会社
運転支援装置
2か月前
日本精機株式会社
表示システム
2か月前
トヨタ自動車株式会社
車両
今日
株式会社SUBARU
車両
1か月前
ダイハツ工業株式会社
車両
1か月前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用表示装置
6日前
日本精機株式会社
車両用表示装置
28日前
ダイハツ工業株式会社
車両
1か月前
日本精機株式会社
車両用表示装置
20日前
日本精機株式会社
車両用表示装置
28日前
日本精機株式会社
車両用表示装置
28日前
日本化薬株式会社
ガス発生器
1か月前
エムケー精工株式会社
車両処理装置
1か月前
ダイハツ工業株式会社
バッグ
22日前
豊田合成株式会社
車両
2か月前
豊田合成株式会社
車両
2か月前
株式会社コーワ
フィルター清掃装置
1か月前
スズキ株式会社
車両制御装置
3か月前
株式会社アイシン
車高調整装置
22日前
日本精機株式会社
車両用撮影システム
20日前
豊田合成株式会社
乗員保護装置
1か月前
ダイハツ工業株式会社
搭載構造
2か月前
ダイハツ工業株式会社
搭載構造
2か月前
個人
ブレーキ踏み間違い救済システム
2か月前
トヨタ自動車株式会社
搬送装置
1日前
豊田合成株式会社
乗員保護装置
2か月前
YKS特許評価株式会社
自動車
1日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ