TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024157936
公報種別
公開特許公報(A)
公開日
2024-11-08
出願番号
2023072614
出願日
2023-04-26
発明の名称
手術支援システム、操作装置および手術支援システムの制御方法
出願人
川崎重工業株式会社
,
株式会社メディカロイド
代理人
個人
主分類
A61B
34/35 20160101AFI20241031BHJP(医学または獣医学;衛生学)
要約
【課題】直線操作時の操作部の操作の安定性を向上させることが可能な手術支援システムを提供する。
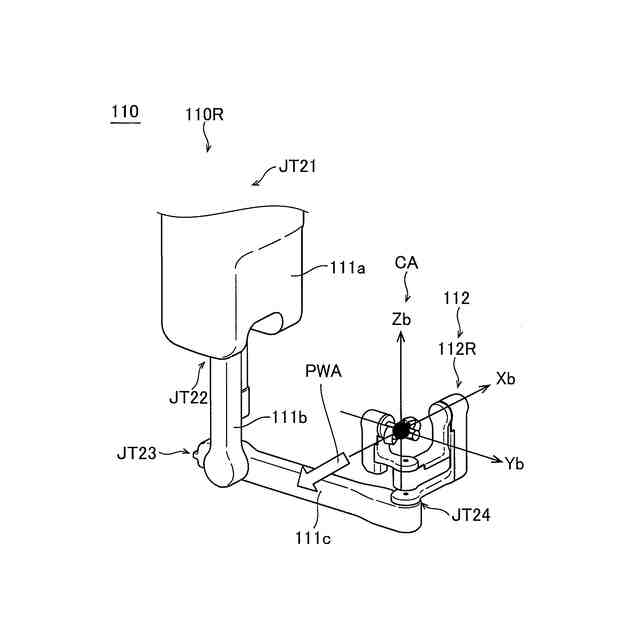
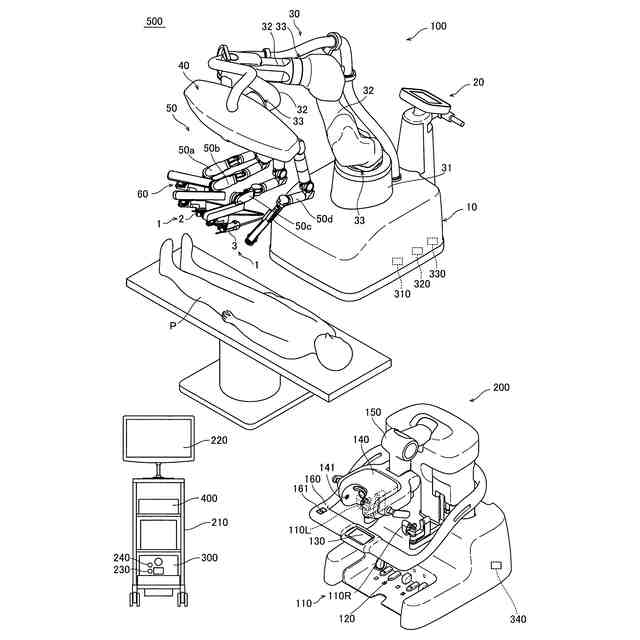
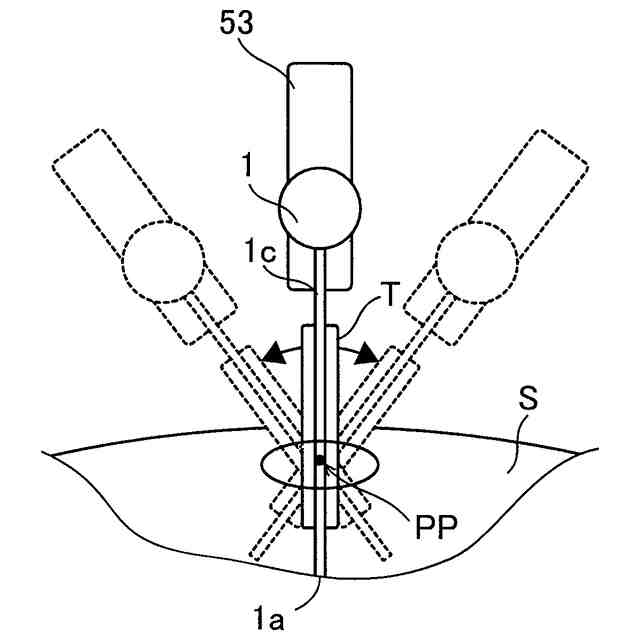
【解決手段】手術支援システム500は、手術器具1を支持するためのロボットアーム50を含む手術支援ロボット100と、操作者の操作を受け付けるように構成され、操作者の操作を補助するためのサーボモータSM7a、SM7bおよびSM7cを有する操作部110を含み、手術支援ロボット100を操作するための遠隔操作装置200と、互いに直交する3軸の直交座標系CAにおいて、操作部110の操作方向とは逆方向の力PWAを働かせるように、サーボモータSM7a、SM7bおよびSM7cを制御する操作制御部340と、を備える。
【選択図】図19
特許請求の範囲
【請求項1】
医療器具を支持するためのロボットアームを含む手術装置と、
操作者の操作を受け付けるように構成され、前記操作者の操作を補助するための駆動部を有する操作部を含み、前記手術装置を操作するための操作装置と、
互いに直交する3軸の直交座標系において、前記操作部の操作方向とは逆方向の力を働かせるように、前記駆動部を制御する制御装置と、を備える、手術支援システム。
続きを表示(約 1,200 文字)
【請求項2】
前記操作者の前記力のレベルの変更操作を受け付ける第1受付部をさらに備え、
前記制御装置は、前記第1受付部により受け付けた前記力のレベルの変更操作に基づいて、前記力のレベルを変更する、請求項1に記載の手術支援システム。
【請求項3】
前記制御装置は、前記操作部の操作速度に基づいて、前記駆動部の動作パラメータを決定し、決定した前記動作パラメータに基づいて、前記力を働かせるように、前記駆動部を制御する、請求項1に記載の手術支援システム。
【請求項4】
前記制御装置は、前記操作部の操作速度の絶対値が第1しきい値以下である場合、前記操作部の操作速度の絶対値が大きくなるに従って前記動作パラメータの絶対値を大きくし、前記操作部の操作速度の絶対値が前記第1しきい値よりも大きい場合、前記動作パラメータの絶対値を最大値で一定にする、請求項3に記載の手術支援システム。
【請求項5】
前記制御装置は、前記操作部の操作の減速時および/または加速時に、前記直交座標系において、制動力を働かせるように、前記駆動部を制御する、請求項1に記載の手術支援システム。
【請求項6】
前記操作者の前記制動力のレベルの変更操作を受け付ける第2受付部をさらに備え、
前記制御装置は、前記第2受付部により受け付けた前記制動力のレベルの変更操作に基づいて、前記制動力のレベルを変更する、請求項5に記載の手術支援システム。
【請求項7】
前記制御装置は、前記操作部の操作の減速時および/または加速時に、前記駆動部の制動パラメータを決定し、決定した前記制動パラメータに基づいて、前記制動力を働かせるように、前記駆動部を制御する、請求項5に記載の手術支援システム。
【請求項8】
前記制御装置は、前記操作部の操作の減速時に、前記制動パラメータを一定にする、請求項7に記載の手術支援システム。
【請求項9】
前記制御装置は、前記操作部の操作の加速時に、前記操作部の操作速度の絶対値が第2しきい値以下である場合、前記制動パラメータを最大値で一定にし、前記操作部の操作速度の絶対値が前記第2しきい値よりも大きくかつ第3しきい値以下である場合、前記操作部の操作速度が大きくなるに従って前記制動パラメータを小さくし、前記操作部の操作速度の絶対値が前記第3しきい値よりも大きい場合、前記制動パラメータをゼロにする、請求項7に記載の手術支援システム。
【請求項10】
前記操作部は、複数の回転軸部を含み、
前記駆動部は、前記複数の回転軸部の各々に対応するように複数設けられ、
前記制御装置は、前記複数の回転軸部のうち前記操作部の固定端側の3つの回転軸部の駆動部において、前記力を働かせる制御を行う、請求項1に記載の手術支援システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この開示は、手術支援システム、操作装置および手術支援システムの制御方法に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、手術支援システムが知られている。たとえば、特許文献1には、操作者の操作を受け付ける操作部を含むマスタ制御装置と、医療器具を支持し、操作部が受け付けた操作量に基づいて制御されるスレーブとしての多関節ロボットアームとを備える手術支援システムが開示されている。
【0003】
特許文献1では、マスタ制御装置の操作部は、複数のリンクを含む多関節アームにより構成されている。多関節アームは、L字状に屈曲された状態で上方から吊り下げられている。また、多関節アームには、モータが設けられている。これにより、操作者が手によって操作部を支えなくても、重力に抗するようにモータのトルクを発生させることによって、多関節アームのL字状に屈曲された状態が維持される。
【0004】
また、特許文献1では、モータとマスタ制御装置との間に設けられる歯車などの摩擦力を補償するように、操作者の操作部の操作速度に応じてモータが力を発生する。これにより、操作部の操作感が軽くなる。
【先行技術文献】
【特許文献】
【0005】
米国特許出願公開第2004/0243110号明細書
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に記載された手術支援システムのように、多関節アームのモータに力を発生させることにより操作部の操作感を軽くした場合、操作部の操作感の軽さに起因して直線操作時に操作部がふらつきやすい場合がある。このため、直線操作時の操作部の操作の安定性を向上させることが望まれている。
【0007】
この開示は、直線操作時の操作部の操作の安定性を向上させることが可能な手術支援システム、操作装置および手術支援システムの制御方法を提供することである。
【課題を解決するための手段】
【0008】
本開示の第1の局面による手術支援システムは、医療器具を支持するためのロボットアームを含む手術装置と、操作者の操作を受け付けるように構成され、操作者の操作を補助するための駆動部を有する操作部を含み、手術装置を操作するための操作装置と、互いに直交する3軸の直交座標系において、操作部の操作方向とは逆方向の力を働かせるように、駆動部を制御する制御装置と、を備える。
【0009】
本開示の第1の局面による手術支援システムでは、互いに直交する3軸の直交座標系において、操作部の操作方向とは逆方向の力を働かせるように、駆動部を制御する制御装置を設ける。これにより、操作部の操作感を重くすることができるので、操作部の操作感の軽さに起因して直線操作時に操作部がふらつくことを抑制することができる。その結果、直線操作時の操作部の操作の安定性を向上させることができる。
【0010】
本開示の第2の局面による操作装置は、医療器具を支持するためのロボットアームを含む手術装置を操作するための操作装置であって、操作者の操作を受け付けるように構成され、操作者の操作を補助するための駆動部を有する操作部と、互いに直交する3軸の直交座標系において、操作部の操作方向とは逆方向の力を働かせるように、駆動部を制御する制御部と、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
液圧回転機械の異常検出システム
1日前
川崎重工業株式会社
指令値送信装置、制御システム、及び、指令値送信方法
今日
個人
健康器具
1か月前
個人
歯の掃除具
4か月前
個人
歯茎みが品
2か月前
個人
鼾防止用具
1か月前
個人
乗馬テラピー
5か月前
個人
マッサージ機
1か月前
個人
脈波測定方法
1か月前
個人
脈波測定方法
1か月前
個人
身体牽引装置
5か月前
個人
洗井間専家。
7日前
個人
導電香
2か月前
個人
塗り薬塗り具
3か月前
個人
白内障治療法
21日前
個人
収納容器
3か月前
個人
健康器具
3か月前
個人
発熱器具
4か月前
個人
片足歩行支援具
2か月前
個人
染毛方法
4か月前
個人
クリップ
2か月前
個人
車椅子持ち上げ器
21日前
個人
眼科診療車
2か月前
個人
磁器治療器
5か月前
個人
口内洗浄具
1か月前
三生医薬株式会社
錠剤
18日前
個人
動体視力強化装置
5か月前
株式会社ナカニシ
生検針
5か月前
株式会社 MTG
浴用剤
2か月前
東レ株式会社
下肢着用具
5か月前
個人
除菌システム
2か月前
株式会社コーセー
美爪料
2か月前
株式会社結心
手袋
28日前
個人
血管硬化度算出方法
5か月前
個人
避難困難者救出台車
2か月前
個人
服薬支援装置
16日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ