TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024157703
公報種別
公開特許公報(A)
公開日
2024-11-08
出願番号
2023072218
出願日
2023-04-26
発明の名称
盛土材料の掘削・採取方法、盛土材料の掘削・採取システム、及び、掘削機械
出願人
株式会社熊谷組
代理人
個人
主分類
E02F
9/26 20060101AFI20241031BHJP(水工;基礎;土砂の移送)
要約
【課題】設計形状の掘削を行いながら、盛土材料を効率的にかつ確実に分別して掘削・採取する。
【解決手段】施工現場の3次元地形データと3次元地質データとから3次元地質モデルを生成するとともに、前記3次元地質モデルと予め設定した材料毎の採取量とから、施工現場の掘削形状の3次元設計形状である設計掘削形状を設定した後、前記3次元地質モデルと前記設計掘削形状とを合成した合成掘削形状を作成し、この合成掘削形状と別途検出した掘削機械の現在位置とから、前記掘削機械の現在位置から測った、現在掘削している地質の層の深さを算出し、前記算出された地層の深さに基づいて、前記地質の層を掘削するようにした。
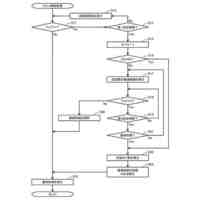
【選択図】図7
特許請求の範囲
【請求項1】
施工現場の3次元地形データと3次元地質データとから3次元地質モデルを生成するステップと、
前記3次元地質モデルと予め設定した材料毎の採取量とから、前記施工現場の掘削形状の3次元設計形状である設計掘削形状を設定するステップと、
前記3次元地質モデルと前記設計掘削形状とを合成した合成掘削形状を作成するステップと、
掘削機械の現在位置を検出するステップと、
前記掘削機械の現在位置と前記合成掘削形状とから、前記掘削機械の現在位置から測った、現在掘削している地質の層の深さを算出するステップと、
前記算出された深さに基づいて、前記地質の層を掘削するステップと、
を備える盛土材料の掘削・採取方法。
続きを表示(約 960 文字)
【請求項2】
実際の地質境界の位置が前記算出された深さのデータと異なった場合には、実績を計測し、前記3次元地質モデルのデータを更新することを特徴とする請求項1に記載の盛土材料の掘削・採取方法。
【請求項3】
施工現場の土砂を掘削する掘削機械と、
前記掘削機械の現在位置の3次元座標を検出する位置検出手段と、
前記施工現場の3次元地図データと3次元地質データとから3次元地質モデルを生成する3次元地質モデル生成手段と、前記3次元地質モデルと予め設定した材料毎の採取量とから、前記施工現場の掘削形状の3次元設計形状である設計掘削形状を設定する設計掘削形状設定手段と、前記3次元地質モデルと前記設計掘削形状とを合成した合成掘削形状を作成する合成掘削形状作成手段と、前記位置検出手段で検出された前記掘削機械の現在位置と前記合成掘削形状とから、前記掘削機械の現在位置から測った、現在掘削している地質の層の深さを算出する地層深さ算出手段を有する地層深さ算出装置と、を備える盛土材料の掘削・採取システム。
【請求項4】
前記算出された地質の層の深さを表示する表示手段を設けたことを特徴とする請求項3に記載の盛土材料の掘削・採取システム。
【請求項5】
施工現場の土砂を掘削して採取する掘削機械であって、
土砂の掘削・採取手段を備えた掘削機械本体と、
前記掘削機械の現在位置の3次元座標を検出する位置検出手段と、
前記施工現場の3次元地図データと3次元地質データとから3次元地質モデルを生成する3次元地質モデル生成手段と、前記3次元地質モデルと予め設定した材料毎の採取量とから、前記施工現場の掘削形状の3次元設計形状である設計掘削形状を設定する設計掘削形状設定手段と、
前記3次元地質モデルと前記設計掘削形状とを合成した合成掘削形状を作成する合成掘削形状作成手段と、
前記位置検出手段で検出された前記掘削機械の現在位置と前記合成掘削形状とから、前記掘削機械の現在位置から測った、現在掘削している地質の層の深さを算出する地層深さ算出手段と、
前記算出された地質の層の深さを表示する表示手段と、
を備えた掘削機械。
発明の詳細な説明
【技術分野】
【0001】
本発明は、フィルダムなどの盛土工事の構築等に用いられる盛土材料を分別して掘削・採取する方法とそのシステム、及び、盛土材料の掘削・採取に用いられる掘削機械に関する。
続きを表示(約 4,700 文字)
【背景技術】
【0002】
フィルダムや盛土工事に用いる盛土材料については、盛土に適した材料を採取するため、地質の種類ごとにそれぞれ適用材料が決められており、掘削時に異なる材料の混入やそれによる材料ロス(捨土の増加)を可能な限り減らす必要がある。
そこで、GNSS(Global Navigation Satellite System / 全球測位衛星システム)などの位置計測装置を用いて建設機械の現在位置を計測するとともに、盛土を掘削・採取するための設計データと現在位置との差分をリアルタイムで提供するマシンガイダンスシステムが用いられている(例えば、特許文献1,2参照)。
設計データは、施工現場の地図データと地質・材質等のデータを有する地質データとから作成される3次元地質モデルと、掘削形状の設計形状データとを用いて作成される。
マシンガイダンスでは、オペレーターは、操縦席のモニター画面でバケットと設計形状の位置とを確認しながら、盛土材料を掘削・採取する。
【先行技術文献】
【特許文献】
【0003】
特開2002-81008号公報
特開2016-212459号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、通常のマシンガイダンスは、あくまで設計データ(仕上がりの形状)を導入して掘削を行っているため、地質毎に材料を掘削・採取する必要がある場合には、設計データ通りに掘削を進めると地質境界線を越えてしまい、採取した材料に異なる地質の材料が混入するおそれがある。
また、それを防ぐには、掘削途中で地質専門技術者が頻繁に現地を確認し判別する必要があるため、多大な労力を要する、といった問題点がある。
【0005】
本発明は、従来の問題点に鑑みてなされたもので、設計形状の掘削を行いながら、盛土材料を効率的にかつ確実に分別して掘削・採取する方法、この方法を実現するためのシステム、及び、盛土材料の掘削・採取に用いられる掘削機械を提供することを目的とする。
【課題を解決するための手段】
【0006】
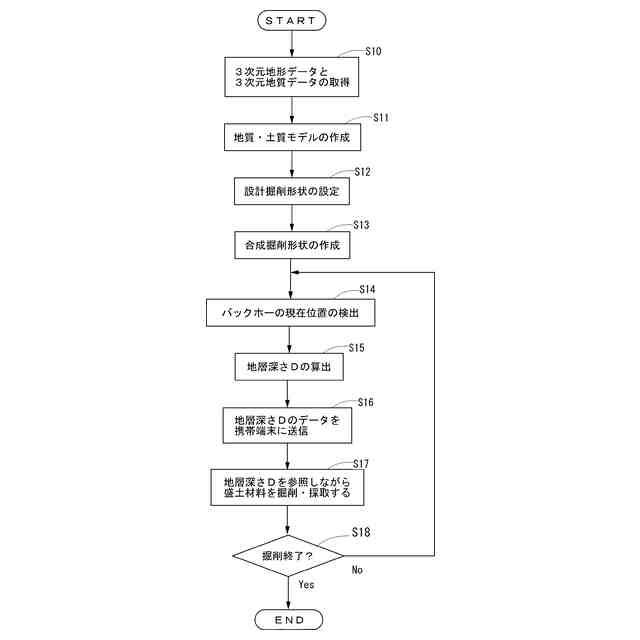
本発明は、盛土材料を掘削して採取する方法であって、施工現場の3次元地形データと3次元地質データとから3次元地質モデルを生成するステップと、前記3次元地質モデルと予め設定した材料毎の採取量とから、前記施工現場の掘削形状の3次元設計形状である設計掘削形状を設定するステップと、前記3次元地質モデルと前記設計掘削形状とを合成した合成掘削形状を作成するステップと、掘削機械の現在位置を検出するステップと、前記掘削機械の現在位置と前記合成掘削形状とから、前記掘削機械の現在位置から測った、現在掘削している地質の層の深さを算出するステップと、前記算出された深さに基づいて、前記地質の層を掘削するステップと、を備えることを特徴とする。
これにより、地層毎の掘削を精度よく行うことができるので、盛土材料を効率的に分別しながら採取することができる。
また、合成掘削形状を用いることで、3次元地質モデルと計設計掘削形状との切り替えをせずに地層毎の掘削を行うことができる。
また、実際の地質境界の位置が前記算出された深さのデータと異なった場合には、実績を計測し、前記3次元地質モデルのデータを更新するようにしたので、これをサイクルとして回すことで、データの精度向上を図ることができる。
【0007】
また、本発明は、盛土材料の掘削・採取システムであって、施工現場の土砂を掘削する掘削機械と、前記掘削機械の現在位置の3次元座標を検出する位置検出手段と、前記施工現場の3次元地図データと3次元地質データとから3次元地質モデルを生成する3次元地質モデル生成手段と、前記3次元地質モデルと予め設定した材料毎の採取量とから、前記施工現場の掘削形状の3次元設計形状である設計掘削形状を設定する設計掘削形状設定手段と、前記3次元地質モデルと前記設計掘削形状とを合成した合成掘削形状を作成する合成掘削形状作成手段と、前記位置検出手段で検出された前記掘削機械の現在位置と前記合成掘削形状とから、前記掘削機械の現在位置から測った、現在掘削している地質の層の深さを算出する地層深さ算出手段を有する地層深さ算出装置と、を備えることを特徴とする。
このような構成を採ることにより、設計形状の掘削を行いながら、盛土材料を効率的に分別しながら採取することのできる盛土材料の掘削・採取システムを得ることができる。
また、前記算出された地質の層の深さを表示する表示手段を設けて、オペレーターに現在の掘削状況を視認させることができるので、効率的な材料の採取・分別を行うことができる。
また、本発明は、施工現場の土砂を掘削して採取する掘削機械を、バケットなどの土砂の掘削・採取手段を備えた掘削機械本体と、前記掘削機械の現在位置の3次元座標を検出する位置検出手段と、前記施工現場の3次元地図データと3次元地質データとから3次元地質モデルを生成する3次元地質モデル生成手段と、前記3次元地質モデルと予め設定した材料毎の採取量とから、前記施工現場の掘削形状の3次元設計形状である設計掘削形状を設定する設計掘削形状設定手段と、前記3次元地質モデルと前記設計掘削形状とを合成した合成掘削形状を作成する合成掘削形状作成手段と、前記位置検出手段で検出された前記掘削機械の現在位置と前記合成掘削形状とから、前記掘削機械の現在位置から測った、現在掘削している地質の層の深さを算出する地層深さ算出手段と、前記算出された地質の層の深さを表示する表示手段とから構成したので、盛土材料を効率的に分別しながら採取することができる。
【図面の簡単な説明】
【0008】
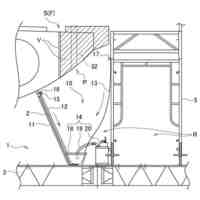
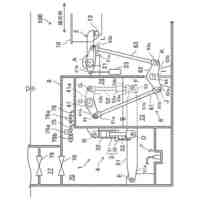
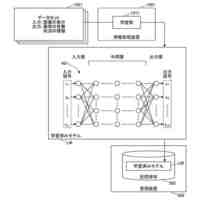
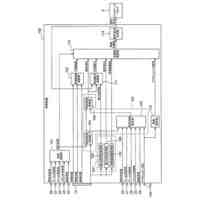
本実施の形態に係る盛土材料の掘削・採取システムを示す図である。
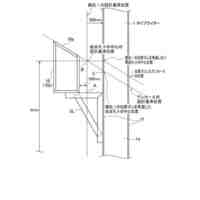
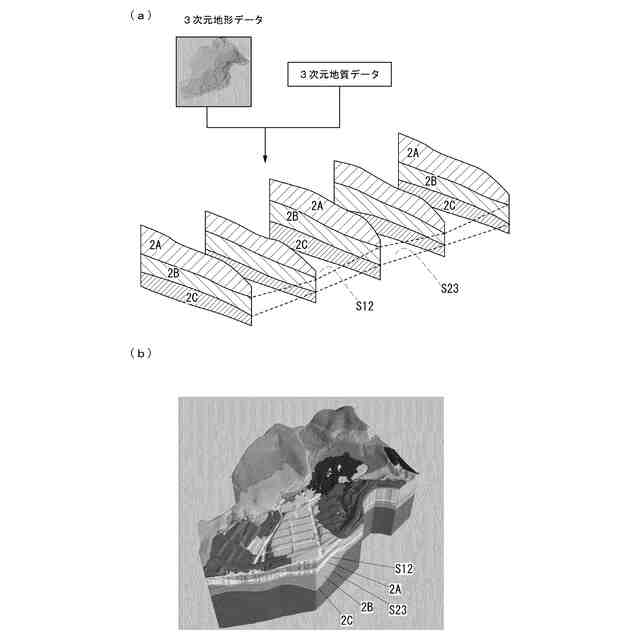
工事着工前の施工現場の地形データと地質・土質モデルを示す図である。
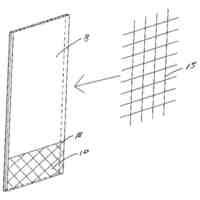
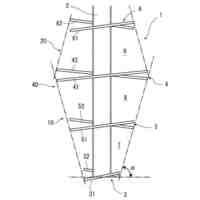
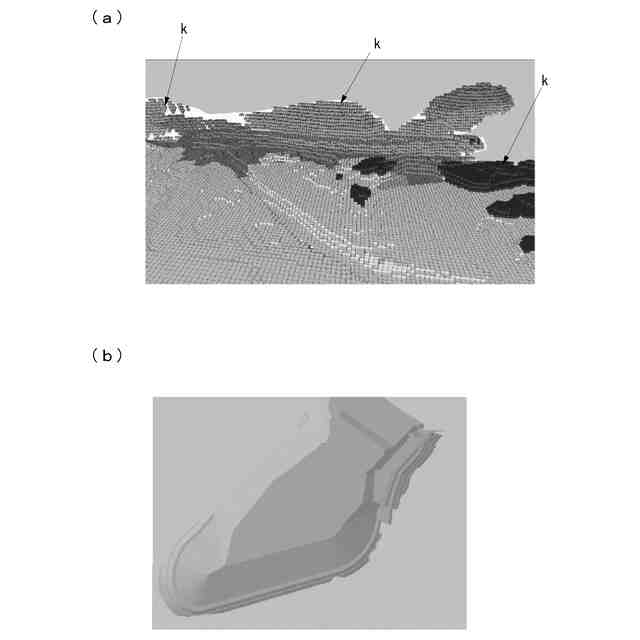
ボクセルモデルと設計掘削形状の一例を示す図である。
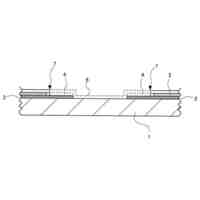
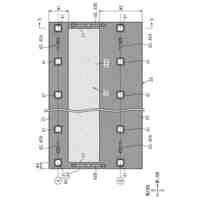
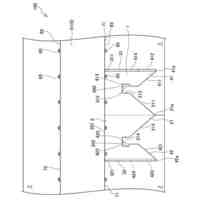
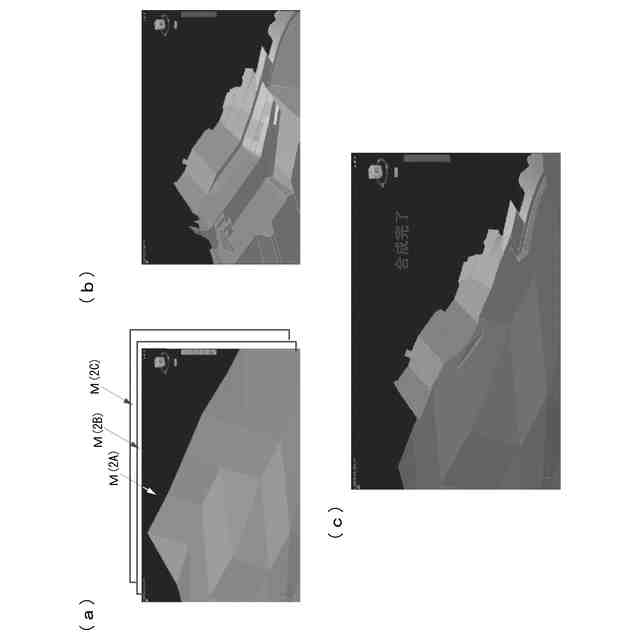
地質境界面と設計掘削形状とを合成した合成掘削形状を示す図である。
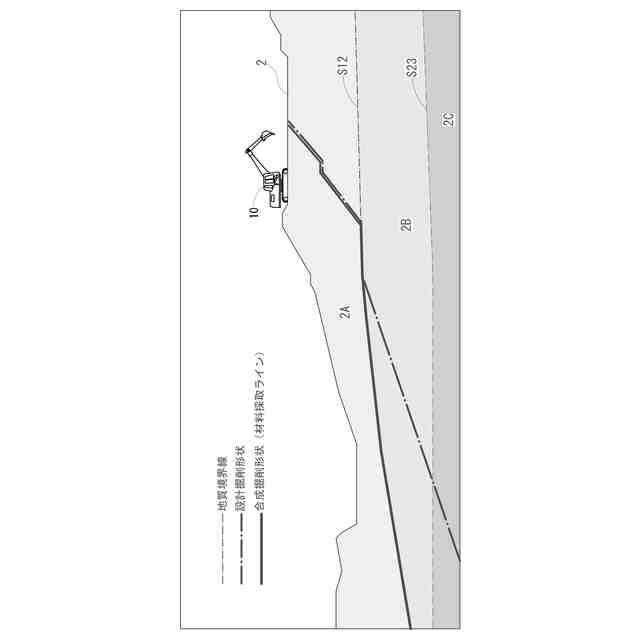
合成掘削形状の断面形状を示す図である。
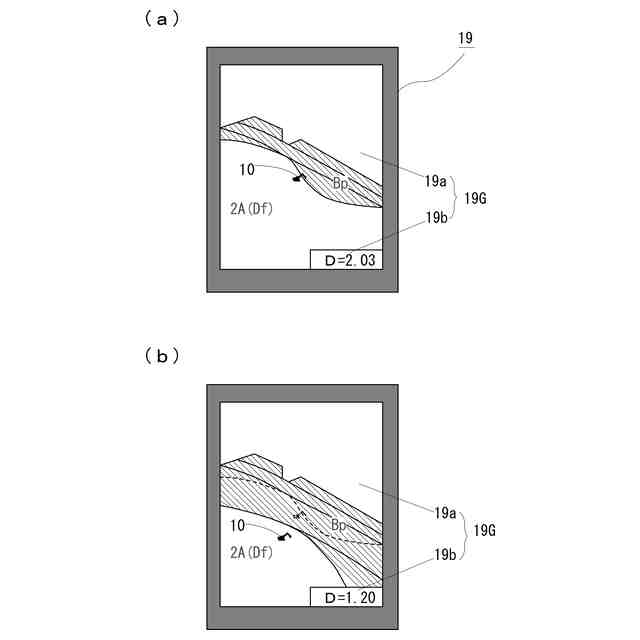
携帯端末の表示画面の一例を示す図である。
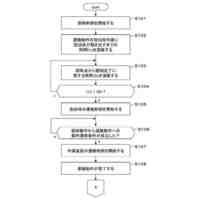
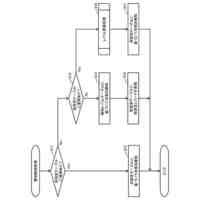
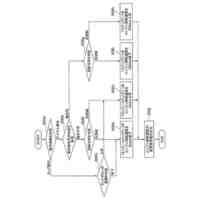
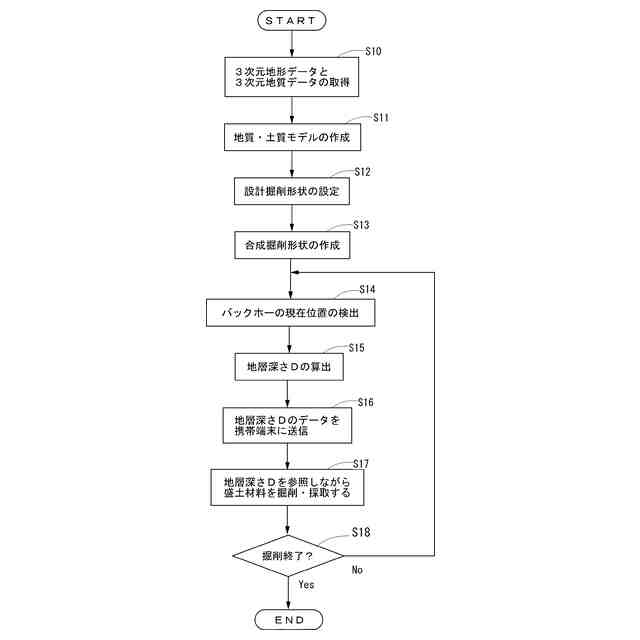
本発明の盛土材料の掘削・採取方法を示すフローチャートである。
【発明を実施するための形態】
【0009】
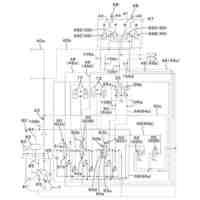
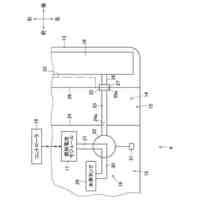
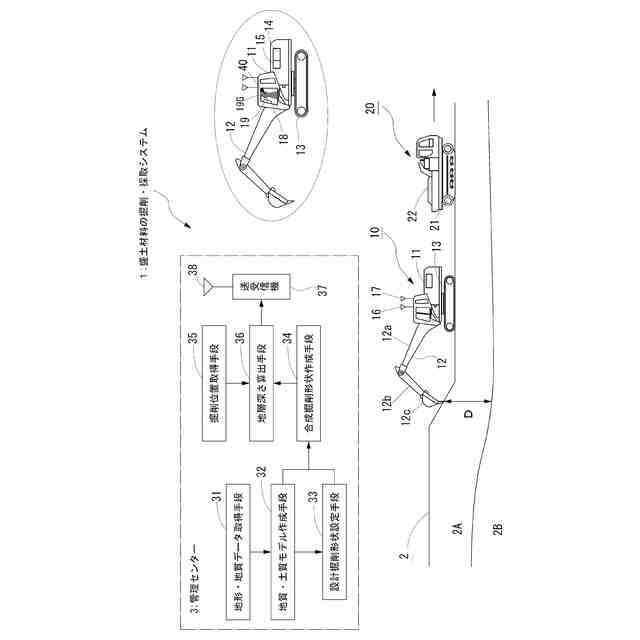
図1は本実施形態に係る盛土材料の掘削・採取システム(以下、採取システム1という)を示す図で、採取システム1は、施工現場2に配置された掘削機械としてのバックホー10と、運搬車両20と、施工現場2とは別の個所に設けられた管理センター3に設置された地層深さ算出装置30とを備える。
バックホー10は、車体本体11と、掘削手段12と、走行手段13と、位置取得手段14と、送受信機15と、GPSアンテナ16と、送受信アンテナ17とを備える。
掘削手段12は、ブーム12a、アーム12b、及び、バケット12cを備え、車体本体11に搭載されて、施工現場2の盛土材料を掘削・採取する。
走行手段13としては、例えば、無限軌道などの凹凸の多い場所を安定して走行できるタイプのものが好ましい。
位置取得手段14は、GPSアンテナ16で受信した図示しない衛星の電波から、当該バックホー10の車体本体11の絶対座標を取得するとともに、車体本体11に対するバケット12cの相対位置から、バケット12cの位置座標を算出する。なお、バケット12cの位置座標としては、施工現場2、もしくは、施工現場2近傍の所定の地点を原点とする座標系の位置座標とすることが好ましい。
算出されたバケット12cの位置座標は、送受信アンテナ17、地層深さ算出装置30に送られる。なお、送受信アンテナ17は、後述するように、地層深さ算出装置30で算出された地層深さのデータを受信する。
バックホー10の運転席18にはオペレーター40が乗車しており、オペレーター40は、運転席18に設けられた携帯端末19を参照しながら、掘削手段12と走行手段13とを操作して、施工現場2の盛土材料を掘削・採取し、運搬車両20に渡す。
携帯端末19には、バックホー10の現在位置と地層深さの算出値をオペレーター40に視認させるための表示画面19Gが設けられている。
運搬車両20は、走行手段21と荷台22とを備え、バックホー10で採取した土砂を荷台22に積込んで図示しない材料置場まで運搬する。なお、図では、運搬車両20のオペレーターについては省略した。
【0010】
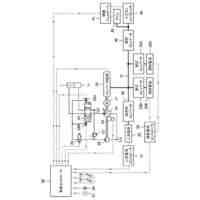
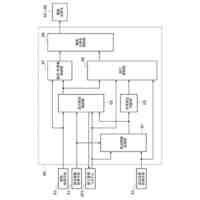
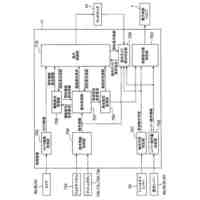
地層深さ算出装置30は、地形・地質データ取得手段31と、地質・土質モデル作成手段32と、設計掘削形状設定手段33、合成掘削形状作成手段34と、掘削位置取得手段35と、地層深さ算出手段36と、送受信機37と、アンテナ38とを備える。地質データ取得手段31~地層深さ算出手段36までの各手段は、コンピューターのソフトウェアとRAM,ROMなどの記憶手段から構成される。
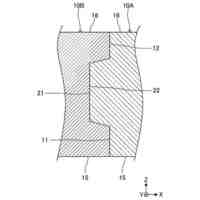
地形・地質データ取得手段31は、まず、図2(a)に示すように、工事着工前の施工現場2の3次元地形データと3次元地質データとを取り込んで、地質断面図を3次元空間上に配置する。
3次元地形データは、例えば、ドローンなどによる写真測量や3Dレーザースキャナーによる測量により得られる。また、3次元地質データは、予め行ったボーリング調査による地盤調査により得られる。
3次元地形データは、通常、図2(a)の左上の図に示すように、平面図で表せるが、平面図の各点はそれぞれ標高の情報を有しているので、3次元地質データと組み合わせることで、施工現場2の任意の方向の地質断面図を得ることができる。
そして、図2(a)の下側の図に示すように、配置された地質・土質の異なる層の境界点を結ぶことで、図2(b)に示すような、3次元地質境界面を作成する。
図2(a),(b)の符号2A,2B,2Cが互いに地質・土質の異なる地層で、2Aは第1層(表面層)、2Bは第2層、2Cは第3層である。また、S12は第1層2Aと第2層2Bとの境界面、S23は第2層2Bと第3層2Cとの境界面である。
地質・土質モデル作成手段32は、上記の地質境界面で囲まれた空間に地質ソリッドモデルを作成する。本例では、ソリッドモデルとして、図3(a)に示すような、ボクセルモデルを用いた。
ボクセルは3Dピクセルで、内部に地質などの情報を持つ立方体kで表せる。このボクセルモデルを用いることで、掘削土量を精度よく算出することができる。
設計掘削形状設定手段33は、地質ソリッドモデルと予め設定しておいた盛土材料の種類や採取量、ダムの貯水容量、ダムの形状、用地などの様々な要素を考慮して、施工現場2の掘削予定形状である設計掘削形状を設定する。
設計掘削形状は、図3(b)に示すように、2次元の掘削平面図で表せるが、平面図の各点には法面勾配、小段の標高などの情報が記載されており、容易に3次元化できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社熊谷組
計測システム
9日前
株式会社熊谷組
吊り足場の遮水設備
11日前
株式会社熊谷組
解体建築材の処理方法
19日前
株式会社熊谷組
山留めアンカーの位置測量方法
18日前
株式会社熊谷組
移動対象領域情報作成装置及び移動対象領域情報作成処理プログラム
25日前
株式会社熊谷組
桟橋構築方法、及び橋梁構築方法
16日前
個人
長尺平板パネル
9日前
個人
構造物の検査方法
10日前
株式会社東部
多翼型鋼管杭
12日前
個人
津波防御三段壁浮上システム。
2日前
カナデビア株式会社
起伏ゲート
10日前
株式会社大林組
基礎構造
16日前
日本車輌製造株式会社
杭打機
12日前
株式会社クボタ
作業機
16日前
日立建機株式会社
作業機械
16日前
日立建機株式会社
建設機械
16日前
カナデビア株式会社
浮体構造体
2日前
日立建機株式会社
作業機械
18日前
鹿島建設株式会社
埋戻し方法
2日前
構法開発株式会社
埋込継手構造
9日前
カナデビア株式会社
係留装置及びその制御方法
10日前
日立建機株式会社
走行装置
19日前
日立建機株式会社
建設機械
18日前
株式会社SEELS
フェンダー用カバー部材
3日前
株式会社クボタ
フロントローダ及び作業車両
9日前
末広産業株式会社
水路用型枠ユニット
17日前
住友重機械工業株式会社
作業現場監視システム
22日前
日立建機株式会社
建設機械
16日前
株式会社熊谷組
山留めアンカーの位置測量方法
18日前
日立建機株式会社
作業機械
16日前
日立建機株式会社
作業機械
16日前
日立建機株式会社
作業機械
17日前
日立建機株式会社
作業機械
12日前
日立建機株式会社
作業機械
16日前
日立建機株式会社
作業機械
17日前
株式会社エンバイン
連結具及び盛土構造
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ