TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025043461
公報種別
公開特許公報(A)
公開日
2025-04-01
出願番号
2023150749
出願日
2023-09-19
発明の名称
移動対象領域情報作成装置及び移動対象領域情報作成処理プログラム
出願人
株式会社熊谷組
代理人
個人
主分類
G06T
7/60 20170101AFI20250325BHJP(計算;計数)
要約
【課題】移動対象領域の二次元画像から移動対象領域の情報を容易に作成できる移動対象領域情報作成装置等を提供する。
【解決手段】本発明に係る移動対象領域情報作成装置は、移動体を移動させる移動対象領域の情報を作成する移動対象領域情報作成装置であって、当該移動対象領域情報作成装置は、前記移動対象領域上に存在する障害物の位置情報を取得する障害物位置情報取得手段を有し、当該障害物位置情報取得手段は、前記移動対象領域上の障害物の外形線が描かれた移動対象領域の二次元画像に対して直線検出を行う直線検出手段と、前記直線検出手段により検出された直線同士の交点及び前記直線検出手段により検出された直線の端点に基づいて障害物の角の位置を検出する角位置検出手段と、を備えたことを特徴とする。
【選択図】図6
特許請求の範囲
【請求項1】
移動体を移動させる移動対象領域の情報を作成する移動対象領域情報作成装置であって、
当該移動対象領域情報作成装置は、
前記移動対象領域上に存在する障害物の位置情報を取得する障害物位置情報取得手段を有し、
当該障害物位置情報取得手段は、
前記移動対象領域上の障害物の外形線が描かれた移動対象領域の二次元画像に対して直線検出を行う直線検出手段と、
前記直線検出手段により検出された直線同士の交点及び前記直線検出手段により検出された直線の端点に基づいて障害物の角の位置を検出する角位置検出手段と、
を備えたことを特徴とする移動対象領域情報作成装置。
続きを表示(約 2,000 文字)
【請求項2】
前記直線検出手段は、移動対象領域上の障害物の位置を示す外形線が描かれた移動対象領域の二次元画像に対して通常ハフ変換処理及び確率的ハフ変換処理による直線検出を行うハフ変換処理手段であることを特徴とする請求項1に記載の移動対象領域情報作成装置。
【請求項3】
前記角位置検出手段は、通常ハフ変換処理より検出された直線同士の交点及び確率的ハフ変換処理より検出された直線の端点に基づいて障害物の角の位置を検出する手段であることを特徴とする請求項2に記載の移動対象領域情報作成装置。
【請求項4】
前記角位置検出手段によって検出された障害物の角の位置に基づいて障害物際の進入禁止エリア境界線を設定する進入禁止エリア境界線設定手段を備えたことを特徴とする請求項1乃至請求項3のいずれか一項に記載の移動対象領域情報作成装置。
【請求項5】
前記移動対象領域上の障害物は、複数種類の障害物であり、
前記二次元画像においては、障害物の位置を示す外形線が障害物の種類毎に異なる色で示されており、
前記障害物位置情報取得手段は、前記外形線の色を識別することにより、障害物毎の外形線が示された複数の画像を作成する画像作成手段を有し、
前記直線検出手段は、前記画像作成手段により作成された各画像に対して直線検出を行い、
前記進入禁止エリア境界線設定手段は、前記角位置検出手段により検出された障害物の角を繋いで形成した障害物の外形から前記移動対象領域側において一定距離離れた位置に進入禁止エリア境界線を設定することを特徴とする請求項4に記載の移動対象領域情報作成装置。
【請求項6】
前記移動対象領域上の障害物は、壁及び柱であり、
前記二次元画像においては、壁の位置を示す外形線と柱の位置を示す外形線とが異なる色で示されており、
前記障害物位置情報取得手段は、前記外形線の色を識別することにより、壁の位置を示す外形線のみが抽出された壁画像と柱の位置を示す外形線のみが抽出された柱画像とを作成する画像作成手段を有し、
前記直線検出手段は、前記画像作成手段により作成された壁画像及び柱画像に対して直線検出を行い、
前記進入禁止エリア境界線設定手段は、前記角位置検出手段により検出された壁の角を繋いで形成した壁の外形から一定距離離れた位置に壁際の進入禁止エリア境界線を設定するとともに、前記角位置検出手段により検出された柱の角を繋いで形成した柱の外形から一定距離離れた位置に柱際の進入禁止エリア境界線を設定することを特徴とする請求項4に記載の移動対象領域情報作成装置。
【請求項7】
移動体を移動させる移動対象領域の情報を作成する移動対象領域情報作成処理プログラムであって、
前記移動対象領域上に存在する障害物の位置情報を取得する障害物位置情報取得処理プログラムを有し、
当該障害物位置情報取得処理プログラムは、
コンピュータを、
前記移動対象領域上の障害物の外形線が描かれた移動対象領域の二次元画像に対して直線検出を行う直線検出手段、
前記直線検出手段により検出された直線同士の交点及び前記直線検出手段により検出された直線の端点に基づいて障害物の角の位置を検出する角位置検出手段、
として機能させることを特徴とする移動対象領域情報作成処理プログラム。
【請求項8】
コンピュータを、前記直線検出手段として機能させるプログラムは、
前記移動対象領域上の障害物の位置を示す外形線が描かれた移動対象領域の二次元画像に対して通常ハフ変換処理及び確率的ハフ変換処理による直線検出を行うハフ変換処理手段として機能させるプログラムであることを特徴とする請求項7に記載の移動対象領域情報作成処理プログラム。
【請求項9】
コンピュータを、前記角位置検出手段として機能させるプログラムは、
通常ハフ変換処理より検出された直線同士の交点及び確率的ハフ変換処理より検出された直線の端点に基づいて障害物の角の位置を検出する手段として機能させるプログラムであることを特徴とする請求項8に記載の移動対象領域情報作成処理プログラム。
【請求項10】
進入禁止エリア境界線設定処理プログラムを有し、
当該進入禁止エリア境界線設定処理プログラムは、
コンピュータを、前記角位置検出手段によって検出された障害物の角の位置に基づいて障害物際の進入禁止エリア境界線を設定する進入禁止エリア境界線設定手段として機能させることを特徴とする請求項7乃至請求項9のいずれか一項に記載の移動対象領域情報作成処理プログラム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動体を移動させる移動対象領域の情報を作成する移動対象領域情報作成装置等に関する。
続きを表示(約 9,100 文字)
【背景技術】
【0002】
本出願人による発明である移動体の移動制御システムとして、移動対象面(移動対象領域)上を移動させる移動体の移動予定情報(移動予定ルート)を作成する移動予定情報作成処理と、移動体を移動予定情報に基づいて移動させるとともに、移動情報取得手段により取得された移動体の実際の移動情報と移動予定情報とを比較して移動体の移動を制御する移動制御処理と、を備えた移動体の移動制御システムが開示されている(特許文献1参照)。
上述の移動制御システムにおいては、移動体の移動予定ルートを作成する際の前提として、移動対象領域上に存在する壁や柱やその他の障害物等の情報を移動制御システムの制御手段に認識させる必要がある。
従来、当該移動対象領域の障害物等の情報は、例えば以下のような方法で作成していた。
作業者が、移動対象領域の図面の上から障害物の外形線を描いて、それを元に障害物の角(かど)の位置の座標(以下、角の位置の座標を「角座標」と略す場合もある。)を求めることで地図を作成していた。
また、図面から移動対象領域の情報を取得することができなかったり、図面を入手できなかった場合等においては、作業者が、移動対象領域の障害物等の位置を実測して移動対象領域の情報(各障害物の角座標)を求めるようにしていた。
上述のように作成した移動対象領域の情報を上述した移動制御システムの制御手段に認識させることによって、当該移動制御システムが、移動対象領域上の障害物を避ける移動体の移動予定ルートを作成することができ、かつ、移動予定ルートに基づいて移動体の移動を制御できるようになる。
【先行技術文献】
【特許文献】
【0003】
特開2020-154400号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の移動対象領域情報作成方法では、上述したように、移動対象領域の情報である各障害物の角座標を手作業で求めていたため、煩雑であり、移動対象領域の情報を容易に作成できるようにしたいという課題があった。
本発明は、上記課題に鑑み、移動対象領域の二次元画像から移動対象領域の情報を容易に作成できる移動対象領域情報作成装置等を提供するものである。
【課題を解決するための手段】
【0005】
本発明に係る移動対象領域情報作成装置は、移動体を移動させる移動対象領域の情報を作成する移動対象領域情報作成装置であって、当該移動対象領域情報作成装置は、前記移動対象領域上に存在する障害物の位置情報を取得する障害物位置情報取得手段を有し、当該障害物位置情報取得手段は、前記移動対象領域上の障害物の外形線が描かれた移動対象領域の二次元画像に対して直線検出を行う直線検出手段と、前記直線検出手段により検出された直線同士の交点及び前記直線検出手段により検出された直線の端点に基づいて障害物の角の位置を検出する角位置検出手段と、を備えたことを特徴とする。
また、前記直線検出手段は、移動対象領域上の障害物の位置を示す外形線が描かれた移動対象領域の二次元画像に対して通常ハフ変換処理及び確率的ハフ変換処理による直線検出を行うハフ変換処理手段であることを特徴とする。
また、前記角位置検出手段は、通常ハフ変換処理より検出された直線同士の交点及び確率的ハフ変換処理より検出された直線の端点に基づいて障害物の角の位置を検出する手段であることを特徴とする。
また、前記角位置検出手段によって検出された障害物の角の位置に基づいて障害物際の進入禁止エリア境界線を設定する進入禁止エリア境界線設定手段を備えたことを特徴とする。
また、前記移動対象領域上の障害物は、複数種類の障害物であり、前記二次元画像においては、障害物の位置を示す外形線が障害物の種類毎に異なる色で示されており、前記障害物位置情報取得手段は、前記外形線の色を識別することにより、障害物毎の外形線が示された複数の画像を作成する画像作成手段を有し、前記直線検出手段は、前記画像作成手段により作成された各画像に対して直線検出を行い、前記進入禁止エリア境界線設定手段は、前記角位置検出手段により検出された障害物の角を繋いで形成した障害物の外形から前記移動対象領域側において一定距離離れた位置に進入禁止エリア境界線を設定することを特徴とする。
また、前記移動対象領域上の障害物は、壁及び柱であり、前記二次元画像においては、壁の位置を示す外形線と柱の位置を示す外形線とが異なる色で示されており、前記障害物位置情報取得手段は、前記外形線の色を識別することにより、壁の位置を示す外形線のみが抽出された壁画像と柱の位置を示す外形線のみが抽出された柱画像とを作成する画像作成手段を有し、前記直線検出手段は、前記画像作成手段により作成された壁画像及び柱画像に対して直線検出を行い、前記進入禁止エリア境界線設定手段は、前記角位置検出手段により検出された壁の角を繋いで形成した壁の外形から一定距離離れた位置に壁際の進入禁止エリア境界線を設定するとともに、前記角位置検出手段により検出された柱の角を繋いで形成した柱の外形から一定距離離れた位置に柱際の進入禁止エリア境界線を設定することを特徴とする。
本発明に係る移動対象領域情報作成処理プログラムは、移動体を移動させる移動対象領域の情報を作成する移動対象領域情報作成処理プログラムであって、前記移動対象領域上に存在する障害物の位置情報を取得する障害物位置情報取得処理プログラムを有し、当該障害物位置情報取得処理プログラムは、コンピュータを、前記移動対象領域上の障害物の外形線が描かれた移動対象領域の二次元画像に対して直線検出を行う直線検出手段、前記直線検出手段により検出された直線同士の交点及び前記直線検出手段により検出された直線の端点に基づいて障害物の角の位置を検出する角位置検出手段、として機能させることを特徴とする。
また、コンピュータを、前記直線検出手段として機能させるプログラムは、前記移動対象領域上の障害物の位置を示す外形線が描かれた移動対象領域の二次元画像に対して通常ハフ変換処理及び確率的ハフ変換処理による直線検出を行うハフ変換処理手段として機能させるプログラムであることを特徴とする。
また、コンピュータを、前記角位置検出手段として機能させるプログラムは、通常ハフ変換処理より検出された直線同士の交点及び確率的ハフ変換処理より検出された直線の端点に基づいて障害物の角の位置を検出する手段として機能させるプログラムであることを特徴とする。
また、進入禁止エリア境界線設定処理プログラムを有し、当該進入禁止エリア境界線設定処理プログラムは、コンピュータを、前記角位置検出手段によって検出された障害物の角の位置に基づいて障害物際の進入禁止エリア境界線を設定する進入禁止エリア境界線設定手段として機能させることを特徴とする。
また、前記移動対象領域上の障害物が、複数種類の障害物であり、前記二次元画像においては、障害物の位置を示す外形線が障害物の種類毎に異なる色で示されており、前記障害物位置情報取得処理プログラムは、コンピュータを、前記外形線の色を識別することにより、障害物毎の外形線が示された複数の画像を作成する画像作成手段、当該画像作成手段により作成された各画像に対して直線検出を行う直線検出手段、前記角位置検出手段により検出された障害物の角を繋いで形成した障害物の外形から前記移動対象領域側において一定距離離れた位置に進入禁止エリア境界線を設定する進入禁止エリア境界線設定手段として機能させることを特徴とする。
また、前記移動対象領域上の障害物が、壁及び柱であり、前記二次元画像においては、壁の位置を示す外形線と柱の位置を示す外形線とが異なる色で示されており、前記障害物位置情報取得処理プログラムは、コンピュータを、前記外形線の色を識別することにより、壁の位置を示す外形線のみが抽出された壁画像と柱の位置を示す外形線のみが抽出された柱画像とを作成する画像作成手段、当該画像作成手段により作成された壁画像及び柱画像に対して直線検出を行う直線検出手段、前記角位置検出手段により検出された壁の角を繋いで形成した壁の外形から一定距離離れた位置に壁際の進入禁止エリア境界線を設定するとともに、前記角位置検出手段により検出された柱の角を繋いで形成した柱の外形から一定距離離れた位置に柱際の進入禁止エリア境界線を設定する前記進入禁止エリア境界線設定手段として機能させることを特徴とする。
本発明に係る移動対象領域情報作成装置及び移動対象領域情報作成処理プログラムによれば、移動対象領域の二次元画像から移動対象領域の情報を容易に作成できるようになった。
【図面の簡単な説明】
【0006】
障害物位置情報取得装置によるハフ変換処理(phase1)の説明図。
障害物位置情報取得装置による壁位置情報検出処理(phase2)の説明図。
障害物位置情報取得装置による壁位置情報検出処理(phase2)の説明図。
障害物位置情報取得装置による柱位置情報検出処理(phase3)の説明図。
障害物位置情報取得装置による柱位置情報検出処理(phase3)の説明図。
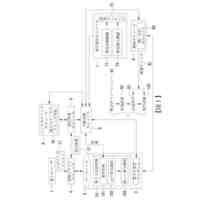
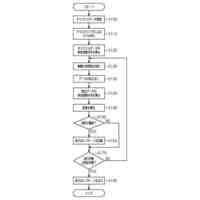
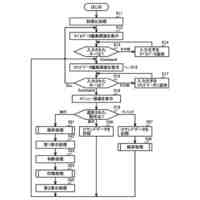
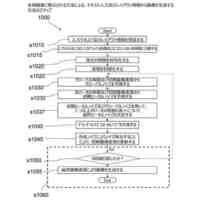
障害物位置情報取得装置による処理の概要を示すフローチャート。
ハフ変換処理(phase1)を示すフローチャート。
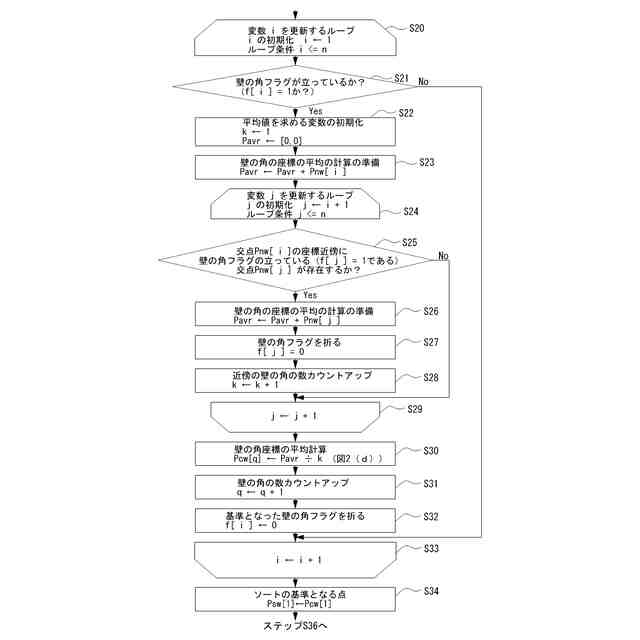
壁位置情報検出処理(phase2)を示すフローチャート。
壁位置情報検出処理(phase2)を示すフローチャート。
壁位置情報検出処理(phase2)を示すフローチャート。
壁位置情報検出処理(phase2)を示すフローチャート。
壁位置情報検出処理(phase2)を示すフローチャート。
壁位置情報検出処理(phase2)を示すフローチャート。
壁位置情報検出処理(phase2)を示すフローチャート。
柱位置情報検出処理(phase3)を示すフローチャート。
柱位置情報検出処理(phase3)を示すフローチャート。
柱位置情報検出処理(phase3)を示すフローチャート。
柱位置情報検出処理(phase3)を示すフローチャート。
柱位置情報検出処理(phase3)を示すフローチャート。
柱位置情報検出処理(phase3)を示すフローチャート。
柱位置情報検出処理(phase3)を示すフローチャート。
【発明を実施するための形態】
【0007】
本発明の実施形態に係る移動対象領域情報作成装置は、移動体を移動させる移動対象領域の情報を作成する移動対象領域情報作成装置であって、当該移動対象領域情報作成装置は、前記移動対象領域上に存在する障害物の位置情報を取得する障害物位置情報取得手段と、進入禁止エリア境界線設定手段とを備える。
障害物位置情報取得手段は、移動対象領域を移動させる移動体の制御手段に、移動対象領域上に存在する障害物を回避するための障害物の位置情報を与えるために、障害物を含む移動対象領域の二次元画像から障害物の位置情報を取得するための手段である。
当該障害物位置情報取得手段は、移動対象領域上の障害物の外形線が描かれた移動対象領域の二次元画像に対して直線検出を行う直線検出手段と、当該直線検出手段により検出された直線同士の交点及び当該直線検出手段により検出された直線の端点に基づいて障害物の角の位置を検出する角位置検出手段と、を備えている。
進入禁止エリア境界線設定手段は、角位置検出手段によって検出された障害物の角の位置に基づいて障害物際の進入禁止エリア境界線を設定する手段である。
直線検出手段は、例えば、移動対象領域上の障害物の位置を示す外形線が描かれた移動対象領域の二次元画像に対して通常ハフ変換処理及び確率的ハフ変換処理による直線検出を行うハフ変換処理手段である。
角位置検出手段は、例えば、通常ハフ変換処理より検出された直線同士の交点及びハフ変換処理手段の確率的ハフ変換処理より検出された直線の端点に基づいて障害物の角の位置を検出する手段である。
移動対象領域は、例えば移動対象面となる建物の床等であり、移動対象領域上に存在する障害物は、例えば床上に位置される壁及び柱等である。
尚、本発明において、移動対象領域情報とは、障害物の角の位置に基づく障害物の位置情報、及び、進入禁止エリア境界線を設定するための位置情報のことである。
上述した直線検出手段としてのハフ変換処理手段及び角位置検出手段により、障害物の角の位置を検出できる。
【0008】
上述した移動対象領域情報作成装置を構成する、ハフ変換処理手段、角位置検出手段、進入禁止エリア境界線設定手段は、各手段が実行する処理の手順を示す処理プログラムと、当該処理プログラムによる情報処理を実現するコンピュータ等のハードウエア資源とにより構成される。
換言すれば、本発明による障害物位置情報取得処理プログラムは、コンピュータを、上述したハフ変換処理手段、角位置検出手段、進入禁止エリア境界線設定手段として機能させるプログラムである。
即ち、移動体を移動させる移動対象領域の情報を作成する移動対象領域情報作成処理プログラムは、移動対象領域上に存在する障害物の位置情報を取得する障害物位置情報取得処理プログラムと、進入禁止エリア境界線設定処理プログラムとを備える。
障害物位置情報取得処理プログラムは、コンピュータを、移動対象領域上の障害物の外形線が描かれた移動対象領域の二次元画像に対して直線検出を行う直線検出手段、直線検出手段により検出された直線同士の交点及び直線検出手段により検出された直線の端点に基づいて障害物の角の位置を検出する角位置検出手段、として機能させるプログラムである。
また、コンピュータを、直線検出手段として機能させるプログラムは、移動対象領域上の障害物の位置を示す外形線が描かれた移動対象領域の二次元画像に対して通常ハフ変換処理及び確率的ハフ変換処理による直線検出を行うハフ変換処理手段として機能させるプログラムである
さらに、コンピュータを、角位置検出手段として機能させるプログラムは、通常ハフ変換処理より検出された直線同士の交点及び確率的ハフ変換処理より検出された直線の端点に基づいて障害物の角の位置を検出する手段として機能させるプログラムである。
進入禁止エリア境界線設定処理プログラムは、コンピュータを、角位置検出手段によって検出された障害物の角の位置に基づいて障害物際の進入禁止エリア境界線を設定する進入禁止エリア境界線設定手段として機能させるプログラムである。
【0009】
まず、実施形態に係る移動対象領域情報作成装置による処理の概要について、図1乃至図5に示す説明図、及び、図6に示すフローチャートに基づいて説明する。
実施形態では、障害物としての壁及び柱の位置情報を検出する場合を例にして説明する。
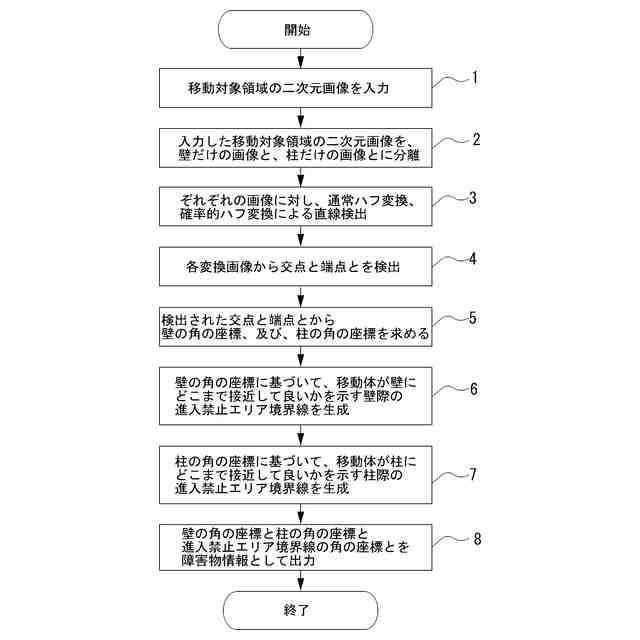
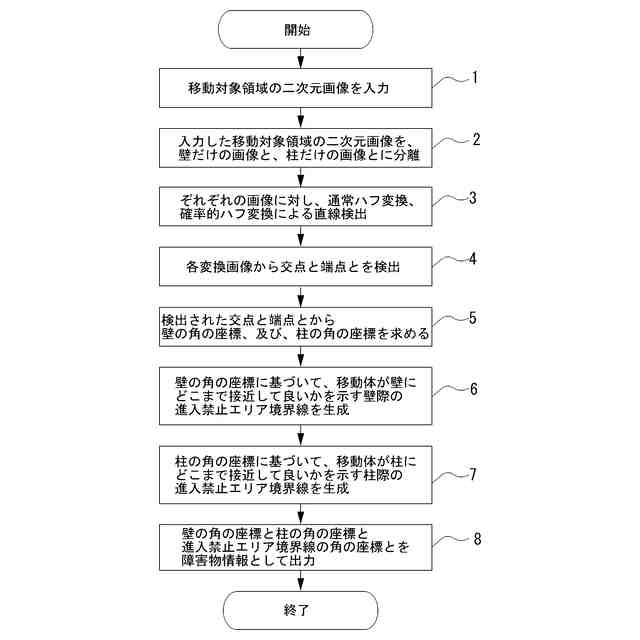
図6のフローチャートに示すように、まず、移動対象領域情報作成装置のハードウエアとしてのコンピュータの入力処理手段が、移動対象領域の二次元画像を入力する(ステップ1)。
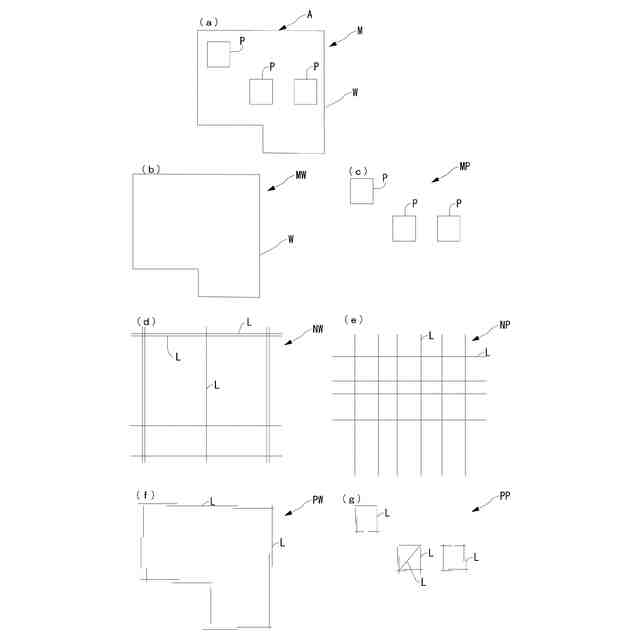
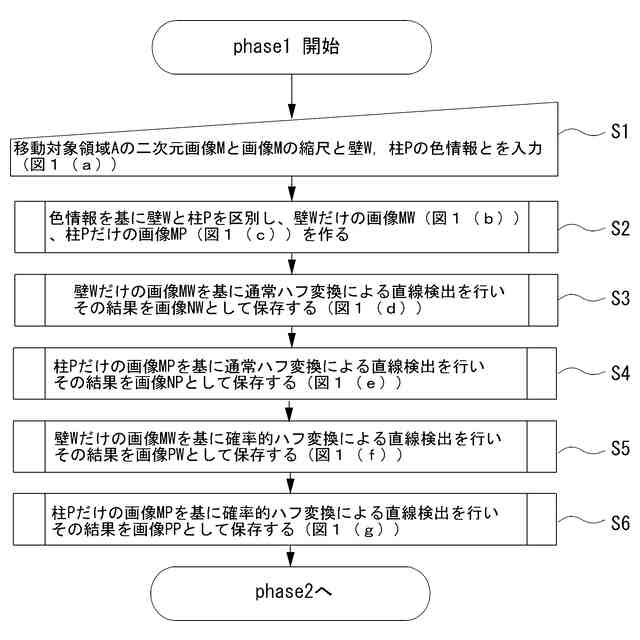
「移動対象領域の二次元画像」とは、例えば、手書き又はコンピュータを用いて作成された移動対象領域の描画画像であり、移動対象領域Aに存在する障害物としての壁W,柱Pが一定の縮尺で描かれた二次元画像M(図1(a)参照)のことである。
即ち、本発明で使用する「移動対象領域の二次元画像」は、例えば、平面図であり、2次元CAD等で作成した移動対象領域を示す図面を、.pngや.jpgのようなファイル形式の画像に変換し、当該画像を、移動対象領域の二次元画像として入力する。
尚、移動対象領域の二次元画像においては、壁の位置を示す外形線と柱の位置を示す外形線とが異なる色で示されるように、色分けして描いておく。例えば、壁を示す外形線の色を赤色、柱を示す外形線の色を青色としておく。
次に、入力した移動対象領域の二次元画像を、壁Wだけの画像MW(図1(b)参照)と、柱Pだけの画像MP(図1(c)参照)とに分離する(ステップ2)。
即ち、実施形態では、二次元画像中の壁の位置を示す外形線と柱の位置を示す外形線とが異なる色で示されており、障害物位置情報取得手段は、入力した二次元画像中の外形線の色を識別することにより、壁の位置を示す外形線のみが抽出された壁画像(壁Wだけの画像MW)と柱の位置を示す外形線のみが抽出された柱画像(柱Pだけの画像MP)とを作成する画像作成手段を備えている。
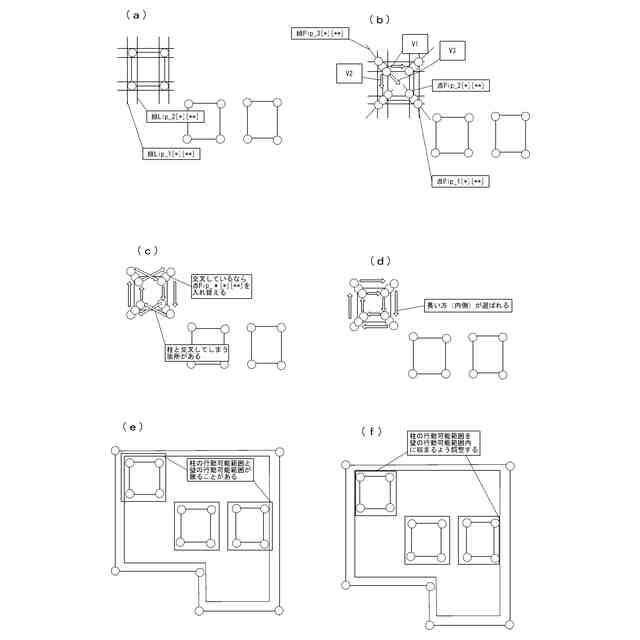
そして、壁だけの画像MWに対して通常ハフ変換及び確率的ハフ変換による直線検出(図1(d),図1(f)参照)を行うとともに、柱だけの画像MPに対して通常ハフ変換及び確率的ハフ変換による直線検出(図1(e),図1(g)参照)を行う(ステップ3)。
即ち、ハフ変換処理手段により、上述したステップ3のハフ変換処理が実行される。
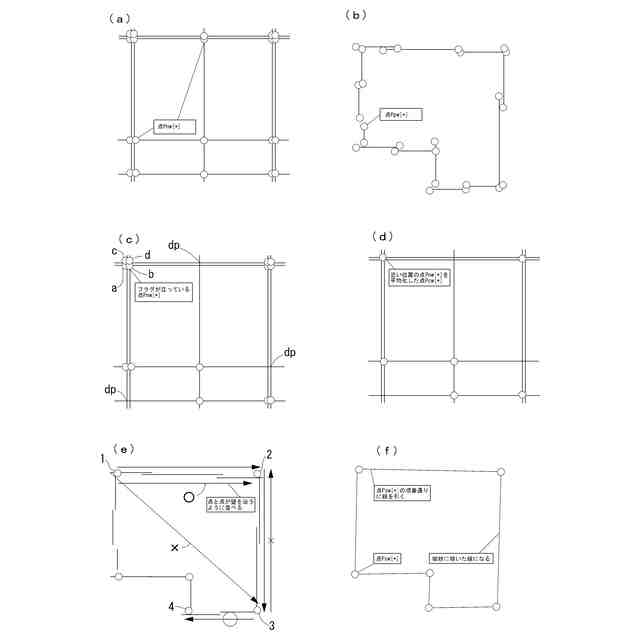
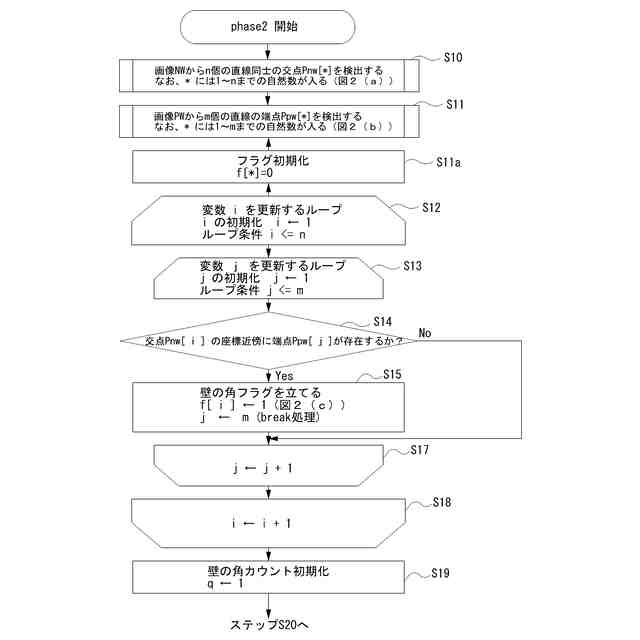
次に、壁だけの画像を通常ハフ変換した変換画像から交点を検出し(図2(a)参照)、壁だけの画像を確率的ハフ変換した変換画像から端点を検出する(図2(b)参照)(ステップ4)。
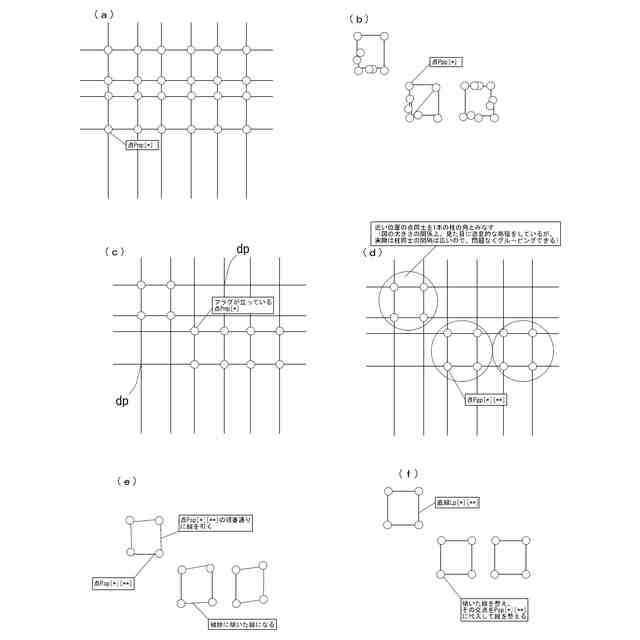
また、柱だけの画像を通常ハフ変換した変換画像から交点を検出し(図4(a)参照)、柱だけの画像を確率的ハフ変換した変換画像から端点を検出する(図4(b)参照)(ステップ4)。
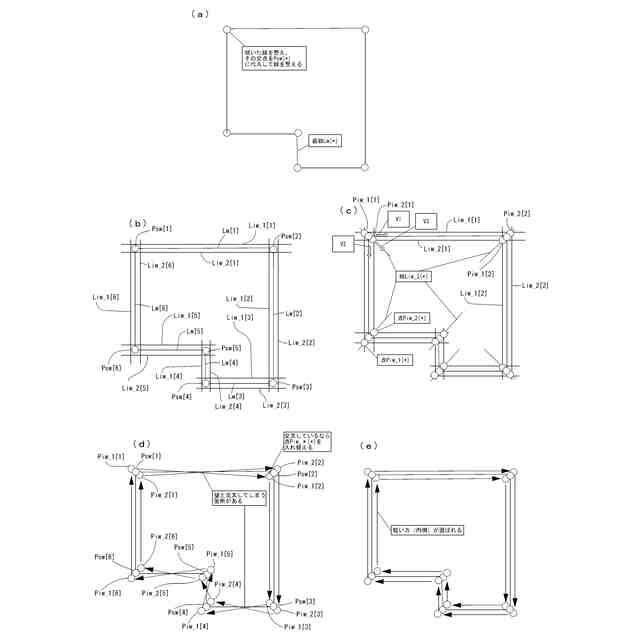
そして、壁だけの画像をハフ変換した変換画像から検出した交点及び端点に基づいて壁の角の座標を求める(図2(c)~図2(f),図3(a)参照)(ステップ5)。
同様に、柱だけの画像をハフ変換した画像から検出した交点及び端点とに基づいて柱の角の座標を求める(図4(c)~図4(f)参照)(ステップ5)。
即ち、角位置検出手段により、上述したステップ4,5の角位置検出処理が実行される。
そして、壁の角の座標に基づいて、移動体が壁にどこまで接近しても良いかを示す壁際の進入禁止エリア境界線を生成する(図3(b)~図3(e)参照)(ステップ6)。
同様に、柱の角の座標に基づいて、移動体が柱にどこまで接近しても良いかを示す柱際の進入禁止エリア境界線を生成する(図5(a)~図5(f)参照)(ステップ7)。
即ち、進入禁止エリア境界線設定手段により、上述したステップ7,8の進入禁止エリア境界線設定処理が実行される。
つまり、進入禁止エリア境界線設定手段は、角位置検出手段により検出された壁の角を繋いで形成した壁の外形から壁の外形の内側に一定距離離れた位置に壁際の進入禁止エリア境界線を設定するとともに、角位置検出手段により検出された柱の角を繋いで形成した柱の外形から柱の外形の外側に一定距離離れた位置に柱際の進入禁止エリア境界線を設定する手段である。
尚、壁の外形の内側、及び、柱の外形の外側とは、移動対象領域内のことである。
即ち、壁際の進入禁止エリア境界線は、例えば壁よりも室内側である移動対象領域内に設定される線であり、柱際の進入禁止エリア境界線は、例えば柱よりも室内側である移動対象領域内に設定される線である。
以上により求まった、壁の角の座標と、柱の角の座標と、進入禁止エリア境界線の角の座標(壁際の進入禁止エリア境界線の角の座標、及び、柱際の進入禁止エリア境界線の角の座標)とを、移動対象領域情報として出力する(ステップ8)。
当該移動対象領域情報を、移動体の移動制御システムの制御手段に認識させることで、移動体の移動制御システムが、移動対象領域での進入禁止エリアを回避した移動体の移動制御を実現できるようになる。
即ち、移動対象領域上の障害物が、壁及び柱であり、二次元画像においては、壁の位置を示す外形線と柱の位置を示す外形線とが異なる色で示されているとともに、上述した障害物位置情報取得処理プログラムは、コンピュータを、外形線の色を識別することにより、壁の位置を示す外形線のみが抽出された壁画像と柱の位置を示す外形線のみが抽出された柱画像とを作成する画像作成手段、当該画像作成手段により作成された壁画像及び柱画像に対して直線検出を行う直線検出手段、角位置検出手段により検出された壁の角を繋いで形成した壁の外形から一定距離離れた位置に壁際の進入禁止エリア境界線を設定するとともに、角位置検出手段により検出された柱の角を繋いで形成した柱の外形から一定距離離れた位置に柱際の進入禁止エリア境界線を設定する前記進入禁止エリア境界線設定手段として機能させるプログラムである。
【0010】
以下、実施形態に係る移動対象領域情報作成装置による処理の詳細について、図1乃至図5に示す説明図、及び、図7乃至図21に示すフローチャートに基づいて説明する。
移動対象領域情報作成装置は、ハフ変換処理(以下、「phase1」という)と、壁位置情報検出処理((壁の角検出処理及び壁際の進入禁止エリア設定処理)、以下、「phase2」という)と、柱位置情報検出処理((柱の角検出処理及び柱際の進入禁止エリア設定処理)、以下、「phase3」という)とを実行する。
即ち、上述したハフ変換処理手段によりphase1が実行され、上述した角位置検出手段及び進入禁止エリア境界線設定手段によりphase2及びphase3が実行されるものである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社熊谷組
計測システム
10日前
株式会社熊谷組
吊り足場の遮水設備
12日前
株式会社熊谷組
解体建築材の処理方法
20日前
株式会社熊谷組
山留めアンカーの位置測量方法
19日前
株式会社熊谷組
桟橋構築方法、及び橋梁構築方法
17日前
個人
非正規コート
13日前
個人
人物再現システム
10日前
個人
AI飲食最適化プラグイン
3日前
個人
電話管理システム及び管理方法
4日前
有限会社ノア
データ読取装置
11日前
株式会社ザメディア
出席管理システム
18日前
個人
広告提供システムおよびその方法
13日前
個人
日誌作成支援システム
10日前
ミサワホーム株式会社
情報処理装置
17日前
トヨタ自動車株式会社
工程計画装置
18日前
株式会社タクテック
商品取出集品システム
17日前
トヨタ自動車株式会社
作業判定方法
19日前
個人
ポイント還元付き配送システム
11日前
オベック実業株式会社
接続構造
10日前
トヨタ自動車株式会社
情報処理システム
19日前
株式会社村田製作所
動き検知装置
17日前
個人
公益寄付インタラクティブシステム
24日前
ゼネラル株式会社
RFIDタグ付き物品
20日前
株式会社ドクター中松創研
生成AIの適切使用法
10日前
トヨタ自動車株式会社
情報処理方法
19日前
株式会社国際電気
支援システム
20日前
個人
コンテンツ配信システム
17日前
株式会社実身美
ワーキングシェアリングシステム
11日前
株式会社エスシーシー
置き配システム
11日前
個人
プラットフォームシステム
17日前
ブラザー工業株式会社
ラベルプリンタ
19日前
富士通株式会社
画像生成方法
23日前
株式会社K-model
運用設計資料作成装置
13日前
個人
注文管理システム及び注文管理プログラム
10日前
株式会社知財事業研究所
運行計画作成システム
17日前
株式会社 喜・扇
緊急事態対応円滑化システム
10日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ