TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024157029
公報種別
公開特許公報(A)
公開日
2024-11-06
出願番号
2024138934,2023085035
出願日
2024-08-20,2018-10-12
発明の名称
情報処理装置
出願人
パイオニア株式会社
代理人
個人
,
個人
,
個人
主分類
G01C
21/26 20060101AFI20241029BHJP(測定;試験)
要約
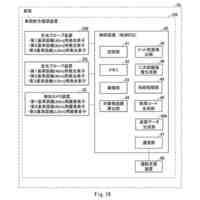
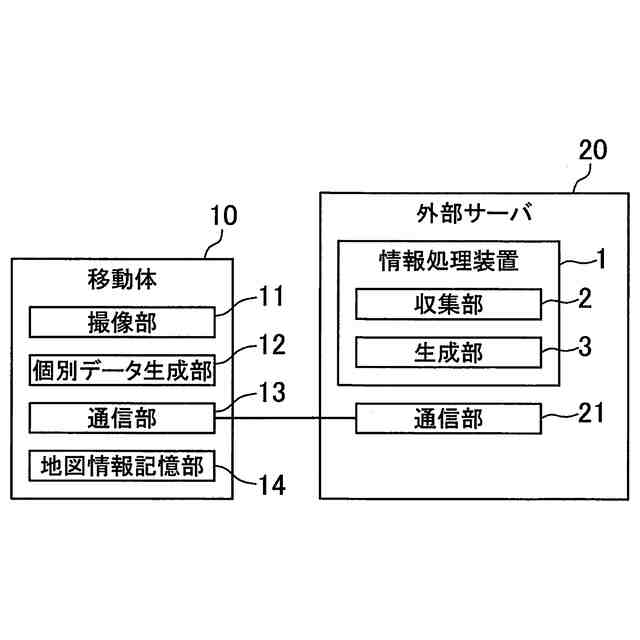
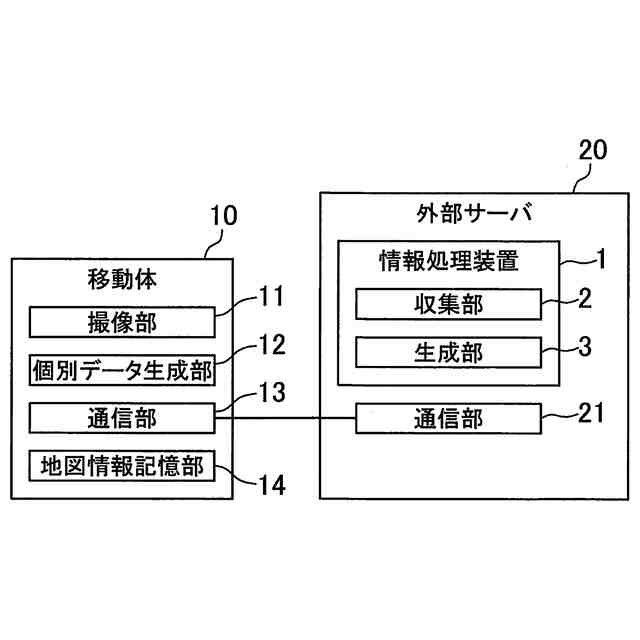
【課題】地図データを利用して生成された個別点群データに基づき、精度の高い総合点群データを生成することができる情報処理装置を提供する。
【解決手段】収集部2が、撮像情報及び地図データに基づいて生成された個別点群データを収集し、生成部3が、複数の個別点群データに基づいて総合点群データを生成する。収集部2が地図データに関する属性情報を取得し、属性情報に基づいて個別点群データの寄与度を決定することで、信頼度の高い地図データに基づく個別点群データの寄与度を高くし、信頼度の低い地図データに基づく個別点群データの寄与度を低くすることができる。これにより、地図データを利用して生成された個別点群データに基づき、精度の高い総合点群データを生成することができる。
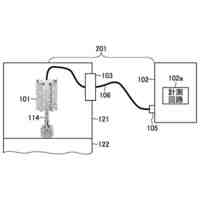
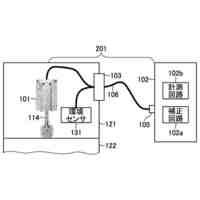
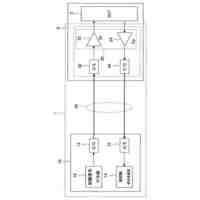
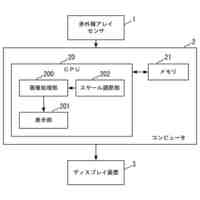
【選択図】図1
特許請求の範囲
【請求項1】
撮像情報及び地図データに基づいて生成された個別点群データを収集する収集部と、
複数の前記個別点群データに基づいて総合点群データを生成する生成部と、を備え、
前記収集部は、前記地図データに関する属性情報を取得し、
前記生成部は、前記複数の個別点群データのそれぞれについて、前記属性情報に基づいて寄与度を決定し、前記総合点群データを生成することを特徴とする情報処理装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、情報処理装置に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来、移動体において自己位置推定と環境地図作成を同時に実行する方法(SLAM;Simultaneous Localization and Mapping)が知られている。このようなSLAMの一種として、レーザ装置に代えてビデオカメラを用いる方法(VSLAM;Visual SLAM)が提案されている(例えば、特許文献1参照)。特許文献1に記載されたようなVSLAMでは、ビデオカメラを用いることによりコスト低減を図っている。
【先行技術文献】
【特許文献】
【0003】
特開2014-222550号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載されたようなVSLAMにおいては、ビデオカメラによって撮像された各画像(フレーム)において特徴点を抽出し、各画像間における特徴点の変化に基づいて自己位置推定及び環境地図作成を行う。このように環境地図を作成する際、既存の地図データを参照することにより、環境地図に含まれる点群データを補正して精度を向上させる方法が考えられる。さらに、所定の区間について複数の点群データを収集して統合することにより精度をさらに向上させる方法が考えられる。
【0005】
しかしながら、各点群データを生成する際、参照する地図データが同一のものであるとは限らない。このため、収集した複数の点群データに、古い地図データや精度の低い地図データを利用して生成された点群データが混ざっていると、統合した点群データの精度が低下してしまう可能性がある。
【0006】
したがって、本発明の課題は、地図データを利用して生成された個別点群データに基づき、精度の高い総合点群データを生成することができる情報処理装置を提供することが一例として挙げられる。
【課題を解決するための手段】
【0007】
前述した課題を解決し目的を達成するために、請求項1に記載の本発明の情報処理装置は、撮像情報及び地図データに基づいて生成された個別点群データを収集する収集部と、複数の前記個別点群データに基づいて総合点群データを生成する生成部と、を備え、前記収集部は、前記地図データに関する属性情報を取得し、前記生成部は、前記複数の個別点群データのそれぞれについて、前記属性情報に基づいて寄与度を決定し、前記総合点群データを生成することを特徴としている。
【図面の簡単な説明】
【0008】
本発明の実施例に係る情報処理装置の概略を示すブロック図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態を説明する。本発明の実施形態に係る情報処理装置は、撮像情報及び地図データに基づいて生成された個別点群データを収集する収集部と、複数の個別点群データに基づいて総合点群データを生成する生成部と、を備える。収集部は、複数の個別点群データのそれぞれについて、個別点群データの生成に利用された地図データに関する属性情報を取得する。生成部は、複数の個別点群データのそれぞれについて、属性情報に基づいて寄与度を決定し、総合点群データを生成する。
【0010】
このような本実施形態の情報処理装置によれば、収集部が地図データに関する属性情報を取得し、属性情報に基づいて個別点群データの寄与度を決定することで、信頼度の高い地図データに基づく個別点群データの寄与度を高くし、信頼度の低い地図データに基づく個別点群データの寄与度を低くすることができる。これにより、地図データを利用して生成された個別点群データに基づき、精度の高い総合点群データを生成することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
通電検査装置
5日前
個人
光フアィバー距離計測器
7日前
個人
光フアィバー距離計測器
7日前
日本精機株式会社
位置検出装置
1日前
個人
バッテリ用交流電流供給装置
7日前
株式会社オービット
検査装置
14日前
株式会社ハシマ
検針機
4日前
東ソー株式会社
自動分析装置及び方法
1日前
株式会社東芝
センサ
14日前
アズビル株式会社
真空計測システム
15日前
アズビル株式会社
真空計測システム
15日前
シスメックス株式会社
分析装置
11日前
DIC株式会社
測定装置
6日前
富士電機株式会社
放射線検出器
6日前
個人
ネブライザー
13日前
株式会社アドバンテスト
試験装置
13日前
株式会社タムラ製作所
電流検出器
11日前
株式会社ヨコオ
シートコンタクタ
1日前
日鉄テックスエンジ株式会社
情報処理装置
11日前
矢崎総業株式会社
電流センサ
5日前
スタンレー電気株式会社
車両前方視認装置
4日前
ダイハツ工業株式会社
凹部の深さ測定方法
4日前
本田技研工業株式会社
物体検出装置
4日前
本田技研工業株式会社
物体検出装置
4日前
スタンレー電気株式会社
車両前方視認装置
4日前
愛知製鋼株式会社
測量方法及び測量システム
11日前
株式会社日本マイクロニクス
プローブ
11日前
株式会社エイアンドティー
生体試料分析装置
11日前
JRCモビリティ株式会社
充電用温度判定回路
1日前
セイコーエプソン株式会社
干渉計
1日前
キヤノン株式会社
放射線撮影装置及びバッテリ
15日前
株式会社テイエルブイ
厚さ測定装置及び厚さ測定方法
6日前
アズビル株式会社
温度測定システムおよび方法
11日前
内山工業株式会社
分析装置用部材
今日
株式会社JVCケンウッド
撮像装置及び測距方法
4日前
株式会社東芝
測距装置
11日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ