TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025043107
公報種別
公開特許公報(A)
公開日
2025-03-28
出願番号
2023150432
出願日
2023-09-15
発明の名称
測距装置
出願人
株式会社東芝
代理人
弁理士法人鈴榮特許綜合事務所
主分類
G01S
7/484 20060101AFI20250321BHJP(測定;試験)
要約
【課題】視程に応じた測距性能劣化を抑制することが可能な測距装置を提供すること。
【解決手段】実施形態の測距装置は、光源、光センサ、計測回路、及び制御回路を含む。光源は、第1レーザー光を出射するように構成される。光センサは、外部の被写体により反射された第1レーザー光に対応する第2レーザー光を検出するように構成される。計測回路は、光源が第1レーザー光を出射したタイミングと、光センサが前記第2レーザー光を検出したタイミングとに基づいて、被写体までの距離を測距するように構成される。制御回路は、測距結果に基づいて前記被写体の反射量を測定し、測定した反射量を利用した情報に応じて、測距パラメータを変更するように構成される。
【選択図】図18
特許請求の範囲
【請求項1】
第1レーザー光を出射するように構成された光源と、
外部の被写体により反射された前記第1レーザー光に対応する第2レーザー光を検出するように構成された光センサと、
前記光源が前記第1レーザー光を出射したタイミングと、前記光センサが前記第2レーザー光を検出したタイミングとに基づいて、前記被写体までの距離を測距するように構成された計測回路と、
測距結果に基づいて前記被写体の反射量を測定し、測定した反射量を利用した情報に応じて、測距パラメータを変更するように構成された制御回路と、を備える、
測距装置。
続きを表示(約 1,100 文字)
【請求項2】
前記情報は、周辺環境における視程の情報に対応し、前記制御回路は、前記測定された反射量に基づいて前記視程を算出するように構成される、
請求項1に記載の測距装置。
【請求項3】
前記情報は、前記被写体の反射量と前記測距パラメータとが関連付けられたテーブルであり、
前記制御回路は、前記測定された反射量に基づいて前記情報を参照して、前記測距パラメータを変更する、
請求項1に記載の測距装置。
【請求項4】
前記制御回路は、前記情報に応じて、前記測距において1フレーム当たりで出射される前記第1レーザー光の回数を減らし、且つ前記第1レーザー光のエネルギーを増やす、
請求項1に記載の測距装置。
【請求項5】
前記制御回路は、前記情報に応じて、前記測距におけるフレームレートを減らし、且つ前記第1レーザー光のエネルギーを増やす、
請求項1に記載の測距装置。
【請求項6】
前記光センサは、照射された光の強度に基づいた電流を出力可能に構成された複数の受光素子を含み、
前記制御回路は、前記情報に応じて、前記複数の受光素子のうち2つ以上の受光素子の組の出力信号を加算して前記計測回路へ出力させる、
請求項1又は請求項4に記載の測距装置。
【請求項7】
前記計測回路は、アナログデジタル変換器をさらに含み、
加算された前記2つ以上の受光素子の組の出力信号は、前記アナログデジタル変換器によりアナログデジタル変換されて、前記計測回路へ出力される、
請求項6に記載の測距装置。
【請求項8】
前記制御回路は、前記情報に応じて、前記測距において、単位時間当たりで出射される前記第1レーザー光の回数を増やし、且つ前記第1レーザー光のエネルギーを減らす、
請求項1に記載の測距装置。
【請求項9】
前記光センサは、前記第2レーザー光の強度に基づいた電流を出力可能に構成された複数の受光素子を含み、
前記計測回路は、それぞれ前記複数の受光素子の出力信号をデジタル信号に変換する複数のアナログデジタル変換器を含み、
前記制御回路は、前記情報に応じて、前記複数のアナログデジタル変換器のうち2つ以上のアナログデジタル変換器の組の出力信号を加算した信号に基づいて前記計測回路に測距させる、
請求項1に記載の測距装置。
【請求項10】
前記複数のアナログデジタル変換器の数と、1つの前記第1レーザー光に基づいて前記計測回路により出力される測距結果の数とが略等しい、
請求項9に記載の測距装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
実施形態は、測距装置に関する。
続きを表示(約 3,200 文字)
【背景技術】
【0002】
LiDAR(Light Detection and Ranging)と呼ばれる測距装置が知られている。LiDARは、レーザー光を測距ターゲットに向けて出射する。出射されたレーザー光は、測距ターゲットにより反射され、LiDARの光センサによって検出される。そして、LiDARは、レーザー光を出射した時間と、測距ターゲットにより反射されたレーザー光を検出した時間とに基づいて、レーザー光の飛行時間(ToF:Time of Flight)を算出する。これにより、LiDARは、LiDARと測距ターゲットとの間の距離を、ToFとレーザー光の速度とに基づいて計測(測距)することができる。このように、LiDARが測距を実現するためには、光センサが、測距ターゲットにより反射されたレーザー光を検出できる必要がある。例えば、出射されたレーザー光は、視程が短くなるほど大きく減衰するため、光センサによるレーザー光の検出は、視程が短くなるほど困難になる。従って、LiDARの測距性能は、視程が短くなるにつれて劣化する傾向を有する。
【先行技術文献】
【特許文献】
【0003】
特許第5832067号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
課題は、視程に応じた測距性能劣化を抑制することが可能な測距装置を提供すること。
【課題を解決するための手段】
【0005】
実施形態の測距装置は、光源、光センサ、計測回路、及び制御回路を含む。光源は、第1レーザー光を出射するように構成される。光センサは、外部の被写体により反射された第1レーザー光に対応する第2レーザー光を検出するように構成される。計測回路は、光源が第1レーザー光を出射したタイミングと、光センサが前記第2レーザー光を検出したタイミングとに基づいて、被写体までの距離を測距するように構成される。制御回路は、測距結果に基づいて前記被写体の反射量を測定し、測定した反射量を利用した情報に応じて、測距パラメータを変更するように構成される。
【図面の簡単な説明】
【0006】
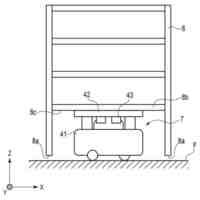
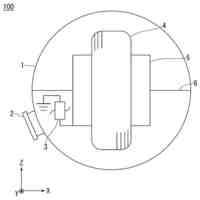
第1実施形態に係る測距システムの構成の一例を示す概略図。
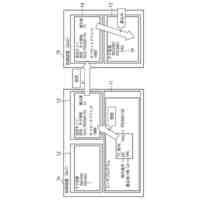
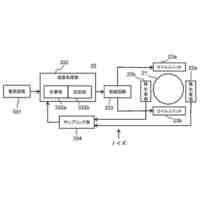
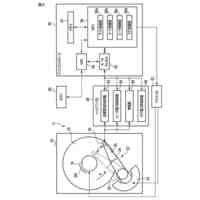
第1実施形態に係る測距システムに含まれた情報処理装置の構成の一例を示すブロック図。
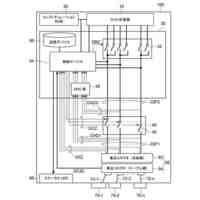
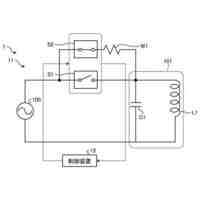
第1実施形態に係る測距装置の構成の一例を示すブロック図。
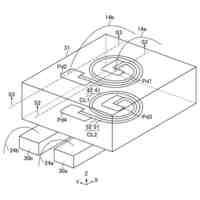
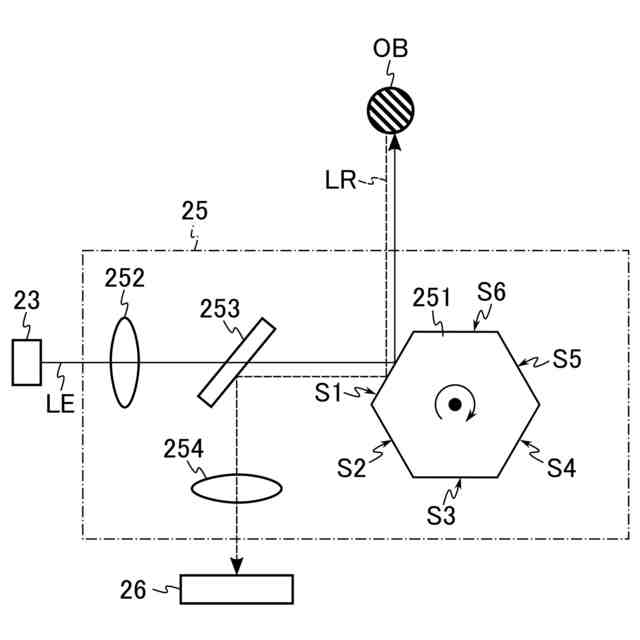
第1実施形態に係る測距装置に含まれた光学系の構成の一例を示す概略図。
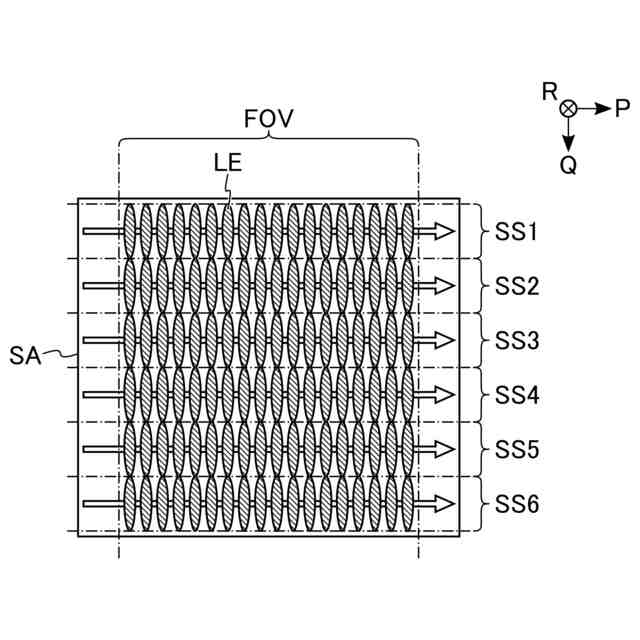
第1実施形態に係る測距装置によってスキャンされるスキャン領域の構成の一例を示す概略図。
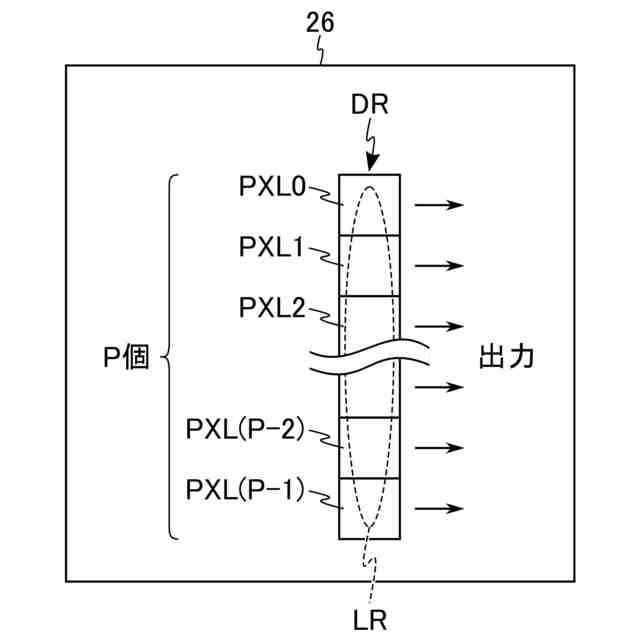
第1実施形態に係る測距装置に含まれた光センサの構成の一例を示す概略図。
第1実施形態に係る測距装置の測距動作により得られる測距結果を示す画像の構成の一例を示す概略図。
第1実施形態に係る測距装置の第1設定に基づくスキャン方法の一例を示す概略図。
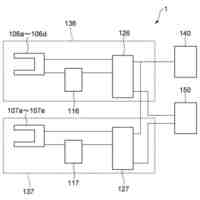
第1実施形態に係る測距装置に含まれた光センサ及び計測装置の第1設定に基づく構成の一例を示す概略図。
第1実施形態に係る測距装置の第2設定に基づくスキャン方法の一例を示す概略図。
第1実施形態に係る測距装置の第3設定に基づくスキャン方法の一例を示す概略図。
第1実施形態に係る測距装置に含まれた光センサ及び計測装置の第4設定に基づく構成の一例を示す概略図。
第1実施形態に係る測距装置の第5設定に基づくスキャン方法の一例を示す概略図。
第1実施形態に係る測距装置の第5設定に基づく受光結果の処理方法の一例を示す概略図。
第1実施形態に係る測距装置に含まれた光センサ及び計測装置の第6設定に基づく構成の一例を示す概略図。
第1実施形態に係る測距装置に含まれた光センサ及び計測装置の第7設定に基づく構成の一例を示す概略図。
第1実施形態に係る測距装置の第8設定に基づく受光結果の処理方法の一例を示す概略図。
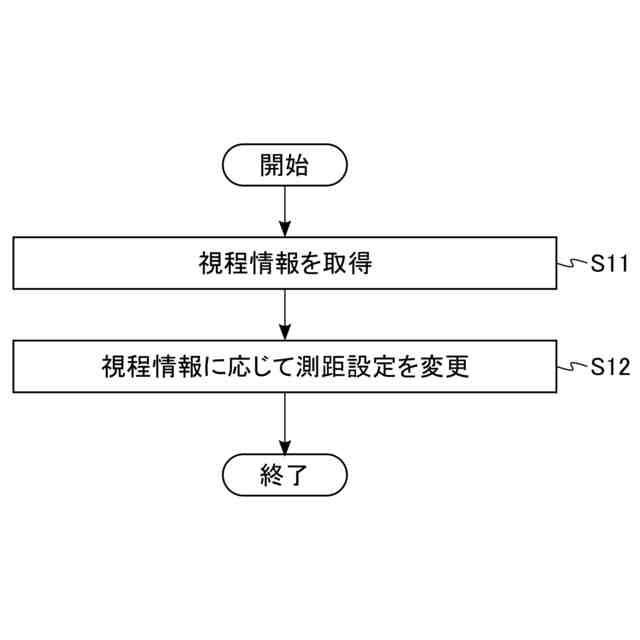
第1実施形態に係る測距システムの設定変更動作の一例を示すフローチャート。
第1比較例と第1実施形態との受光特性の差異の一例を示すグラフ。
第2実施形態に係る測距装置に含まれた光センサ及び計測装置の構成の一例を示す概略図。
第2実施形態に係る測距装置の受光結果の処理方法の一例を示す概略図。
第3実施形態に係る測距装置に含まれた光センサ及び計測装置の構成の一例を示す概略図。
第3実施形態に係る測距装置の受光結果の処理方法の一例を示す概略図。
第4実施形態に係る測距装置に含まれた光センサ及び計測装置の構成の一例を示す概略図。
第4実施形態に係る測距装置の受光結果の処理方法の一例を示す概略図。
第5実施形態に係る測距システムの測距対象の一例を示す概略図。
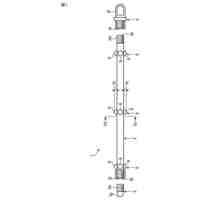
第5実施形態に係る測距システムで使用されるランドマークの構成の一例を示す概略図。
視程の計測方法の概要を示す概略図。
視程の計測方法の一例を示す概略図。
第5実施形態に係る測距システムの視程算出動作の一例を示すフローチャート。
第5実施形態に係る測距装置の受光結果の処理方法の一例を示す概略図である。
第5実施形態に係る測距システムにおいて被写体利用の視程算出方法が適用される計測結果の第1例を示すテーブル。
第5実施形態に係る測距システムにおいて被写体利用の視程算出方法が適用される計測結果の第2例を示すテーブル。
ランドマークLMの位置と画素数の関係の一例を示す概略図。
視程が異なる4条件において、ランドマークの計測領域RG1を測距した場合の受光量と距離との関係性の一例を示す概略図。
視程が異なる4条件において、ランドマークの計測領域RG2を測距した場合の受光量と距離との関係性の一例を示す概略図。
第2比較例における計測結果の一例を示すテーブル。
第5実施形態における計測結果の一例を示すテーブル。
【発明を実施するための形態】
【0007】
以下に、各実施形態について図面を参照して説明する。各実施形態は、発明の技術的思想を具体化するための装置や方法を例示している。図面は、模式的又は概念的なものである。各図面の寸法及び比率等は、必ずしも現実のものと同一とは限らない。以下の説明において、略同一の機能及び構成を有する構成要素には、同一の符号が付加されている。
【0008】
<1>第1実施形態
第1実施形態は、視程に応じて測距パラメータを変更するように構成された測距システム1に関する。以下に、第1実施形態に係る測距システム1の詳細について説明する。
【0009】
<1-1>構成
まず、第1実施形態に係る測距システム1の構成について説明する。
【0010】
<1-1-1>測距システム1の構成
図1は、第1実施形態に係る測距システム1の構成の一例を示す概略図である。図1は、測距システム1を備える輸送機器VEが所定の経路を移動している状況を示している。図1に示すように、測距システム1は、情報処理装置10及び測距装置20を含む。輸送機器VEは、例えば、鉄道車両である。なお、測距システム1を備える輸送機器VEは、自動車、航空機、船舶などであってもよい。輸送機器VEが鉄道車両である場合、所定の経路は、線路である。輸送機器VEが自動車である場合、所定の経路は、例えば、区画線等により走行する領域が規定された道路である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東芝
センサ
2か月前
株式会社東芝
電子機器
24日前
株式会社東芝
回転電機
1か月前
株式会社東芝
搬送装置
24日前
株式会社東芝
遮断装置
23日前
株式会社東芝
判定装置
25日前
株式会社東芝
配線治具
16日前
株式会社東芝
立て看板
1か月前
株式会社東芝
制御装置
1か月前
株式会社東芝
燃料電池
1日前
株式会社東芝
回転電機
3か月前
株式会社東芝
回転電機
3か月前
株式会社東芝
回転電機
3か月前
株式会社東芝
主幹制御器
9日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
真空バルブ
2か月前
株式会社東芝
半導体装置
2か月前
株式会社東芝
半導体装置
2か月前
株式会社東芝
半導体装置
1日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
29日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
電磁流量計
18日前
株式会社東芝
静止誘導電器
2か月前
株式会社東芝
電力変換装置
2か月前
株式会社東芝
操作盤カバー
22日前
株式会社東芝
アンテナ装置
22日前
株式会社東芝
アイソレータ
1か月前
株式会社東芝
静止誘導電器
2か月前
株式会社東芝
ディスク装置
18日前
株式会社東芝
スイッチギヤ
2か月前
株式会社東芝
スイッチギヤ
1か月前
株式会社東芝
ディスク装置
1か月前
株式会社東芝
情報表示装置
3か月前
株式会社東芝
区分システム
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ