TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024155217
公報種別
公開特許公報(A)
公開日
2024-10-31
出願番号
2023069710
出願日
2023-04-21
発明の名称
自律走行ロボットおよび走行経路生成方法
出願人
株式会社明電舎
代理人
園田・小林弁理士法人
主分類
G05D
1/43 20240101AFI20241024BHJP(制御;調整)
要約
【課題】周囲環境に応じた走行経路をより容易に生成する。
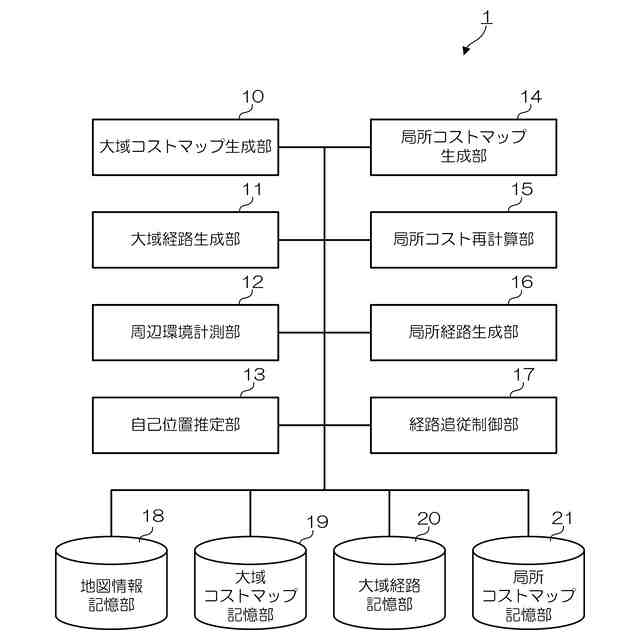
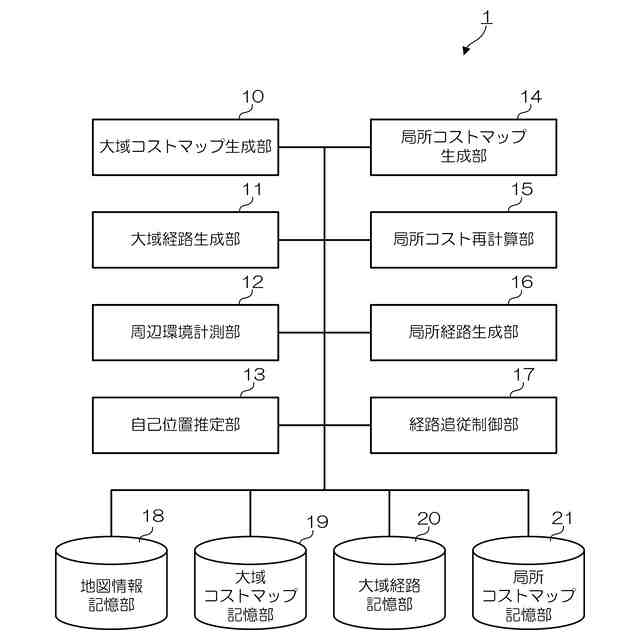
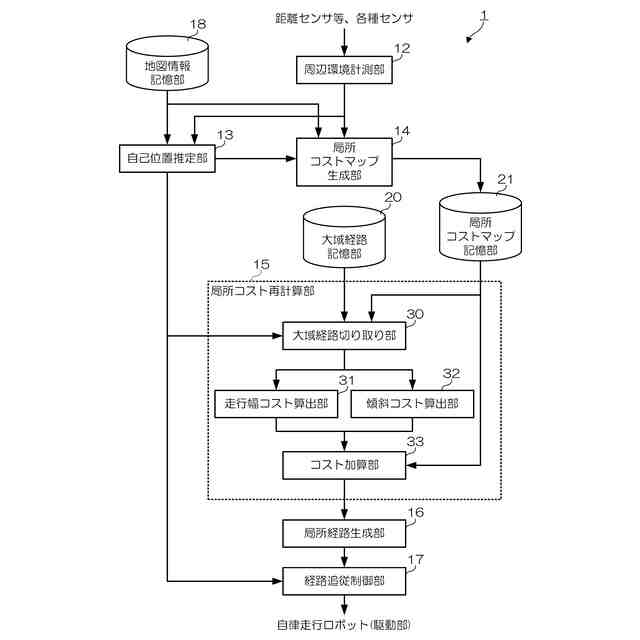
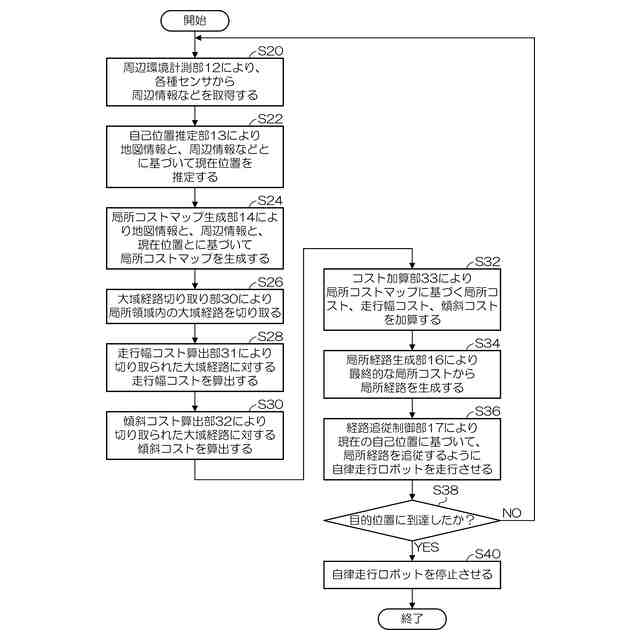
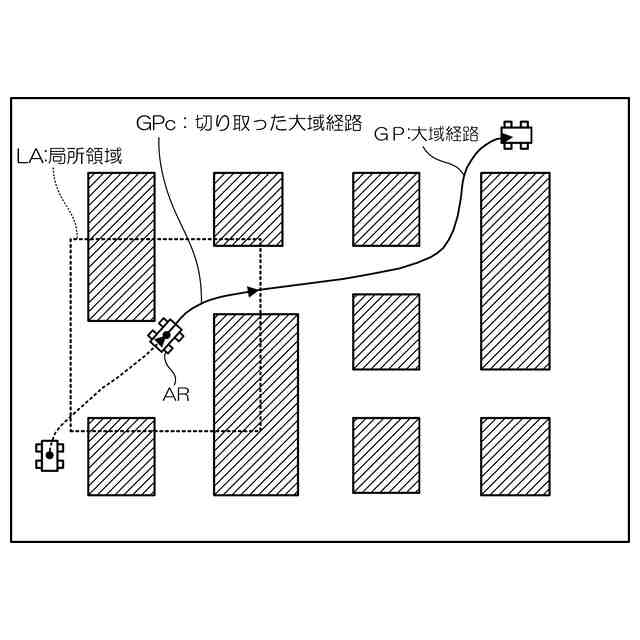
【解決手段】大域経路切り取り部は、出発地点から目的地点までの間で障害物を避けるように生成された大域経路から、局所領域内に含まれる大域経路を切り取る。局所コストマップ生成部14は、局所領域において障害物が存在する場所で最大値となり、障害物から離れるにつれて漸次小さな値となる局所コストが設定された局所コストマップを生成する。局所コスト再計算部15は、切り取った大域経路から所定の距離だけずらした場所に局所コストの最小値が位置するように局所コストを更新する。局所経路生成部16は、更新された局所コストが最小値となる場所を走行経路とする局所経路を生成し、経路追従制御部17により、局所経路に沿って自律走行ロボットの走行を駆動制御する。
【選択図】図1
特許請求の範囲
【請求項1】
出発地点から目的地点までの経路に沿って走行する自律走行ロボットであって、
前記出発地点から前記目的地点までの間で障害物を避けるように生成された大域経路から、現在位置に基づく局所領域内に含まれる大域経路を特定する大域経路特定部と、
前記局所領域における障害物が存在する場所で最大値となり、前記障害物から離れるにつれて漸次小さな値となる局所コストが設定された局所コストマップを生成する局所コストマップ生成部と、
前記特定した大域経路から所定の距離だけずらした場所に前記局所コストの最小値が位置するように前記局所コストを更新する局所コスト再計算部と、
前記更新された局所コストが最小値となる場所を走行経路とする局所経路を生成する局所経路生成部と、
前記局所経路に沿って前記自律走行ロボットの走行を駆動制御する経路追従制御部と、
を備えることを特徴とする自律走行ロボット。
続きを表示(約 1,100 文字)
【請求項2】
前記局所コスト再計算部は、
前記特定した大域経路を中心として走行可能な幅で最小値となり、当該走行可能な幅を越えるに従って漸次大きな値となる走行幅コストを算出する走行幅コスト算出部と、
前記特定した大域経路の直交方向に対して一方から他方に漸次大きな値となる傾斜コストを算出する傾斜コスト算出部と、
前記走行幅コストと、前記傾斜コストと、前記局所コストマップに基づく局所コストとを合算して前記更新された局所コストを算出するコスト加算部と、
を更に備えることを特徴とする請求項1に記載の自律走行ロボット。
【請求項3】
前記自律走行ロボットの現在位置を推定する自己位置推定部と、
前記自律走行ロボットの周辺における障害物に関する周辺情報を計測する周辺環境計測部と、を更に備え、
前記局所コストマップ生成部は、
前記自律走行ロボットの現在位置と、前記障害物に関する周辺情報とに基づいて、前記局所コストが設定された局所コストマップを生成する、
ことを特徴とする請求項1に記載された自律走行ロボット。
【請求項4】
前記障害物には、動的障害物が含まれることを特徴とする請求項3に記載された自律走行ロボット。
【請求項5】
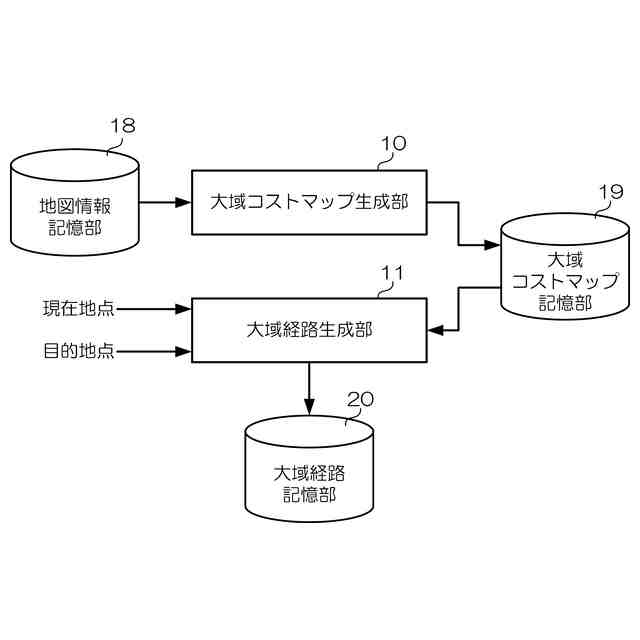
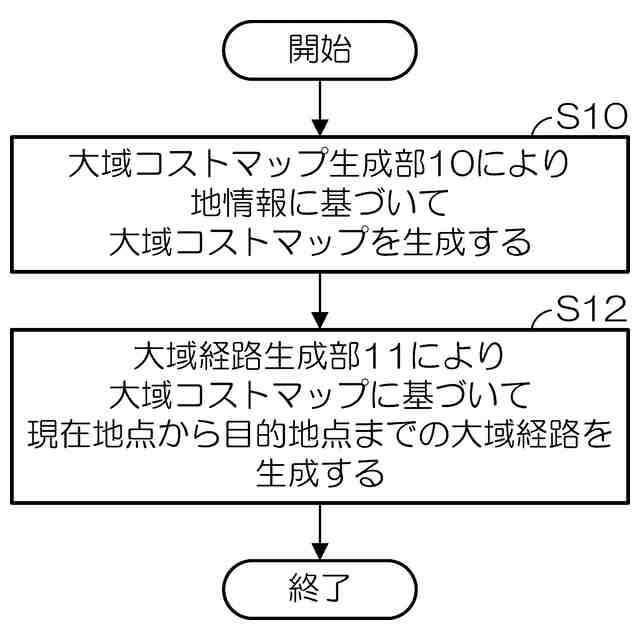
前記自律走行ロボットが走行する全範囲に対して、前記障害物が存在する場所で最大値となり、前記障害物から離れるにつれて漸次小さな値となる大域コストが設定された大域コストマップを生成する大域コストマップ生成部と、
前記大域コストに基づいて、前記出発地点から前記目的地点までの大域経路を生成する大域経路生成部と、
を更に備えることを特徴とする請求項1に記載された自律走行ロボット。
【請求項6】
自律走行ロボットの走行経路を生成する走行経路生成方法であって、
出発地点から目的地点までの間で障害物を避けるように生成された大域経路から、現在位置に基づく局所領域内に含まれる大域経路を特定すること、
前記局所領域における障害物が存在する場所で最大値となり、前記障害物から離れるにつれて漸次小さな値となる局所コストが設定された局所コストマップを生成すること、
前記特定した大域経路から所定の距離だけずらした場所に前記局所コストの最小値が位置するように前記局所コストを更新すること、
前記更新された局所コストが最小値となる場所を前記走行経路とする局所経路を生成すること、
を含むことを特徴とする走行経路生成方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自律走行ロボットおよび走行経路生成方法に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
自律走行ロボットは、最終到達位置となる目的地点まで移動する際には、構造物を含む障害物(以下、単に障害物と称する)の位置情報を含む地図情報を用いて現在地点(出発地点)から目的地点まで、障害物などから所定の距離離れた主に通路中央を走行するような経路(大域経路)を生成し、障害物に接触(又は衝突)しないように逐次回避しながら大域経路に沿って走行する。大域経路の生成方法には大きく2つの方法がある。
【0003】
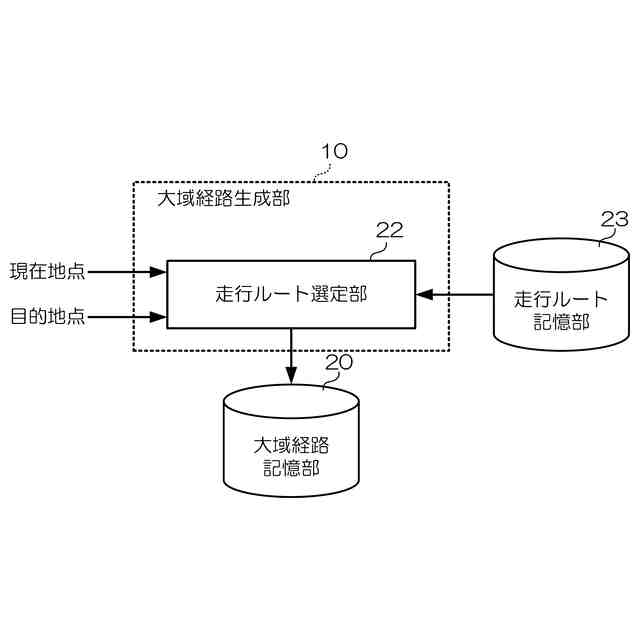
第1の方法は、図16に示すように、大域経路として、現在地点(出発地点)と目的地点との間に、地図上の障害物OBに衝突しないように自由な最適経路を生成する方法である。第2の方法、図17に示すように、工場内の搬送ロボットのように、予め決められた経路を大域経路として選択する方式である。いずれの図においても、自律走行ロボットARが、斜線の矩形で示される障害物OB、OB…を回避するように設定された大域経路GP1、GP2に沿って出発地点から目的地点まで走行する様子が示されている。
【0004】
自律走行ロボットARが大域経路GP(GP1又はGP2)に通従して走行する際には、図18に示すように、周辺の障害物OBをリアルタイムで検出し、障害物OBがあれば障害物OBを回避するように、大域経路GPに沿った狭い範囲での経路(局所経路LP)を生成して、その局所経路LPに沿って迂回しつつ目的地点まで走行する。この局所経路LPは、障害物OBを回避する際に大域経路GPからずれることになるが、可能な限り、大域経路GPから大きく外れないように生成される。このような自律走行に必要な経路計画や、経路追従のアルゴリズムなどは、ROS(Robot Operating System)といったミドルウェアでも提供されており、これを利用することで実現可能となる。
【0005】
しかしながら、例えば、通路を対向して複数台の自律走行ロボットが走行する状況において、上述した第1の方法として説明した自由に大域経路を生成する方法では、図19(a)に示すように、大域経路GPを左から右へ走行する自律走行ロボットAR1と、大域経路GPを右から左へ走行するAR2とが正面で向き合った場合に、それぞれが相手を左右どちらに避けるべきかが問題となる。換言すれば、左右どちらに局所経路LPを生成するか(自律走行ロボットAR1については局所経路LP1L(左)か局所経路LP1R(右)か、自律走行ロボットAR2については局所経路LP2L(左)か局所経路LP2R(右)か)を判断できないため動作が不安定となるという問題がある。そこで、上述した第2の方法を用いて、図19(b)に示すように、1つの通路ですれ違えるように、1本の通路に自律走行ロボットAR1、AR2の各々に対する一方通行の大域経路GPa、GPbを設定する方法もある。しかし、そのような通路が多い場合には、設定する手間が煩雑になるという問題がある。
【0006】
例えば、特許文献1では、出発地点から目的地点までの最短経路(通路の中央を通る経路)を探索した後、最短経路に対して一方向(例えば、右方向)に一定距離(シフト量)だけシフトさせた経路を移動経路(大域経路)としている。すなわち、通路の幅に対して中央から一定距離だけずらした経路を走行する片側通行を実現することで、人間の歩行を妨げるのを防ぐようにしている。
【先行技術文献】
【特許文献】
【0007】
特許5446765号
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、特許文献1では、シフト量は、出発地点や目的地点などからの距離や、障害物からの距離など、状態に応じたシフト量を算出してから最終的に値を決定する必要があり、動的障害物(人や、車などの移動体、あるいは地図上にない荷物、対向走行する他の自律走行ロボットなども含む)を回避するためには別途ベクトル場を設ける必要があるなど、周囲環境に柔軟に対応することができないと問題があった。
【0009】
本発明の目的は、周囲環境に応じた走行経路をより容易に生成することができる自律走行ロボットおよび走行経路生成方法を提供することである。
【課題を解決するための手段】
【0010】
本発明は、上記課題を解決するため、以下の手段を採用する。
すなわち、本発明の自律走行ロボットは、出発地点から目的地点までの経路に沿って走行する自律走行ロボットであって、前記出発地点から前記目的地点までの間で障害物を避けるように生成された大域経路から、現在位置に基づく局所領域内に含まれる大域経路を特定する大域経路特定部と、前記局所領域における障害物が存在する場所で最大値となり、前記障害物から離れるにつれて漸次小さな値となる局所コストが設定された局所コストマップを生成する局所コストマップ生成部と、前記特定した大域経路から所定の距離だけずらした場所に前記局所コストの最小値が位置するように前記局所コストを更新する局所コスト再計算部と、前記更新された局所コストが最小値となる場所を走行経路とする局所経路を生成する局所経路生成部と、前記局所経路に沿って前記自律走行ロボットの走行を駆動制御する経路追従制御部と、を備えることを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社明電舎
無人搬送車
16日前
株式会社明電舎
電力変換装置
16日前
株式会社明電舎
トランス構造、ゲート駆動回路
16日前
株式会社明電舎
車両冷却装置、車両冷却装置用ダクト
17日前
株式会社明電舎
監視装置、監視方法及び監視プログラム
24日前
エイブリック株式会社
基準電圧回路
16日前
和研工業株式会社
多連レバー機構
29日前
スター精密株式会社
工作機械
1か月前
株式会社クボタ
作業車
19日前
株式会社ダイフク
搬送車
19日前
ローム株式会社
半導体集積回路
24日前
エイブリック株式会社
ボルテージレギュレータ
16日前
トヨタ自動車株式会社
工作機械の制御装置
18日前
トヨタ自動車株式会社
工作機械の制御装置
17日前
愛知機械テクノシステム株式会社
無人搬送車
1か月前
株式会社やまびこ
走行制御装置
4日前
株式会社ダイフク
物品搬送設備
17日前
アズビル株式会社
制御システムおよび制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
日本精工株式会社
制御装置および制御方法
1か月前
株式会社ダイヘン
搬送車
16日前
チームラボ株式会社
走行システム及び走行路
1か月前
株式会社ダイヘン
搬送車
16日前
株式会社ダイヘン
搬送車
16日前
株式会社ダイヘン
搬送車
16日前
トヨタ自動車株式会社
群制御システム及び群制御方法
1か月前
村田機械株式会社
稼働監視システム及び稼働監視方法
1か月前
株式会社デンソー
診断装置
2日前
井関農機株式会社
作業車両
12日前
ミツミ電機株式会社
多方向入力装置
1か月前
ローム株式会社
バイアス回路
18日前
ミツミ電機株式会社
多方向入力装置
1か月前
オルガノ株式会社
運転管理方法及び運転管理装置
19日前
ミツミ電機株式会社
多方向入力装置
22日前
ミツミ電機株式会社
多方向入力装置
22日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ