TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024149386
公報種別
公開特許公報(A)
公開日
2024-10-18
出願番号
2024019560,2023129619
出願日
2024-02-13,2023-04-06
発明の名称
カーゴローダ、コントローラ、コントローラの動作方法、協調制御方法
出願人
全日本空輸株式会社
代理人
個人
主分類
B64F
1/32 20060101AFI20241010BHJP(航空機;飛行;宇宙工学)
要約
【課題】ドーリを用いた貨物の取り扱いにおいて、作業者の負担を軽減する。
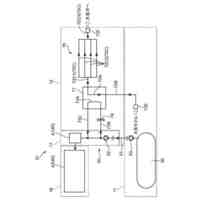
【解決手段】開示のドーリシステムは、複数のドーリと、コントローラと、を備える。複数のドーリそれぞれは、貨物が載置される載置面と、コントローラからの信号に基づき、貨物を他のドーリへ移載する移載駆動装置と、を備える。複数のドーリは、カーゴローダに対する貨物の移載ポイントである1又は複数の第1ドーリを含む。第1ドーリは、コントローラからの信号に基づき、前記第1ドーリの前記載置面を水平回転させる回転駆動装置を備える。
【選択図】図1
特許請求の範囲
【請求項1】
航空機の貨物の運搬に用いられるとともに、前記航空機に装着されたカーゴローダとの間で前記貨物が移載されるドーリシステムであって、
連結部を介して直列に連結された複数のドーリと、
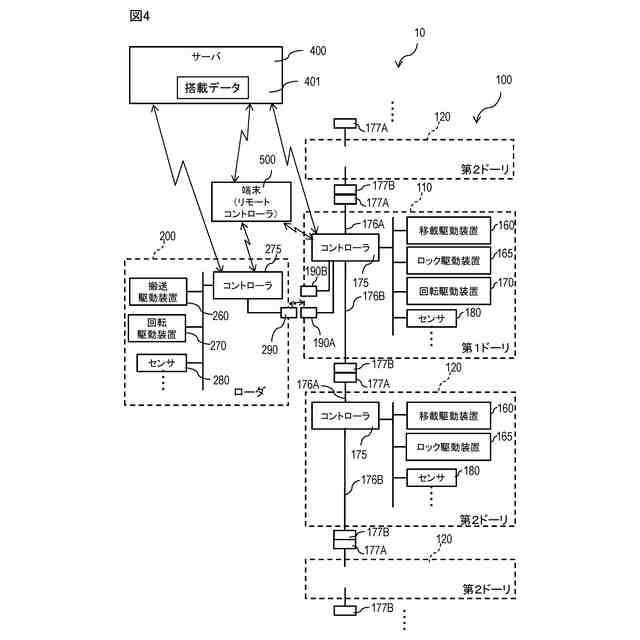
前記複数のドーリを制御する1又は複数のコントローラと、
を備え、
前記複数のドーリそれぞれは、
前記貨物が載置される載置面と、
前記コントローラからの信号に基づき、前記載置面に載置された貨物を、前記複数のドーリにおいて隣接して連結された他のドーリへ移載するための駆動力を発生する移載駆動装置と、
を備え、
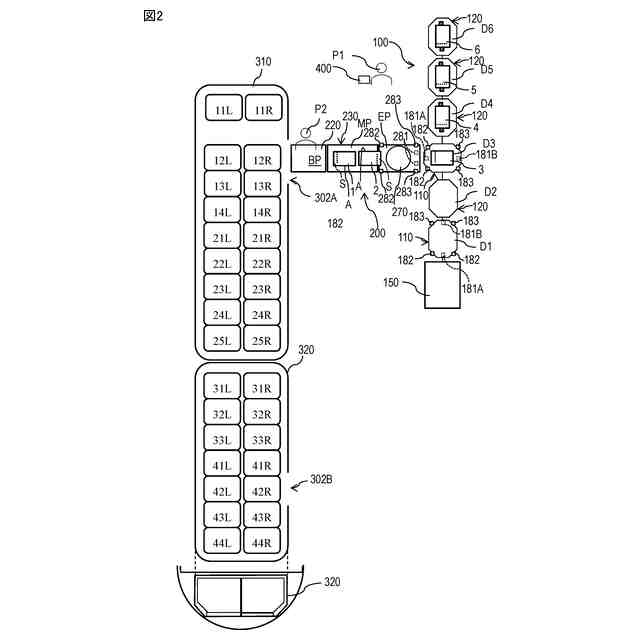
前記複数のドーリは、前記カーゴローダに対する貨物の移載ポイントである1又は複数の第1ドーリを含み、
前記第1ドーリは、前記コントローラからの信号に基づき、前記第1ドーリの前記載置面を水平回転させることで、前記載置面に載置された貨物の向きを変更するとともに、前記移載駆動装置による移載方向を変更する回転駆動装置を備える
ドーリシステム。
続きを表示(約 1,900 文字)
【請求項2】
前記複数のドーリは、前記移載ポイントではない1又は複数の第2ドーリを含み、
前記1又は複数のコントローラは、ドーリ制御のため、搭載処理及び取卸処理の少なくともいずれか一方の処理を実行するよう構成され、
前記搭載処理は、前記第2ドーリに載置された貨物が、前記第1ドーリに移載されるように、少なくとも前記第2ドーリの前記移載駆動装置を制御することを含み、
前記取卸処理は、前記カーゴローダから前記第1ドーリに移載した前記貨物が、前記第2ドーリに移載されるように、少なくとも前記第1ドーリの前記移載駆動装置を制御することを含む
請求項1に記載のドーリシステム。
【請求項3】
前記複数のドーリは、前記移載ポイントではない1又は複数の第2ドーリを含み、
前記1又は複数のコントローラは、前記複数のドーリの制御のため、搭載処理及び取卸処理の少なくともいずれか一方の処理を実行するよう構成され、
前記搭載処理は、
前記第2ドーリに載置された貨物が、前記第1ドーリに移載されるように、少なくとも前記第2ドーリの前記移載駆動装置を制御し、
前記第1ドーリに貨物が載置されていることを検知するセンサによって、前記貨物が前記第1ドーリに移載したことを検知すると、前記移載方向が、前記第1ドーリの側方に位置する前記カーゴローダに向くように、前記回転駆動装置を制御し、
前記移載方向が前記カーゴローダに向いた後に、前記第1ドーリに移載した前記貨物を前記他の航空機支援機材に移載するため、前記第1ドーリの前記移載駆動装置を制御する
ことを含み、
前記取卸処理は、
前記移載方向が、前記第1ドーリの側方に位置する前記カーゴローダに向くように、前記回転駆動装置を制御し、
前記第1ドーリに貨物が載置されていることを検知するセンサによって、前記貨物が前記カーゴローダから前記第1ドーリに移載したことを検知すると、前記移載方向が隣接する他のドーリに向くように、前記回転駆動装置を制御し、
前記移載方向が隣接する他のドーリに向いた後に、前記第1ドーリに移載した前記貨物を前記第2ドーリに移載するため、少なくとも前記第1ドーリの前記移載駆動装置を制御する
ことを含む
請求項1に記載のドーリシステム。
【請求項4】
前記コントローラは、
前記搭載処理において、前記カーゴローダのコントローラへ、前記カーゴローダにおける貨物の回転の制御に用いられるデータを送信すること、及び
前記取卸処理において、前記カーゴローダのコントローラから、前記回転駆動装置による回転の制御に用いられるデータを受信すること、
の少なくともいずれか一方を実行するよう構成されている
請求項2又は請求項3に記載のドーリシステム。
【請求項5】
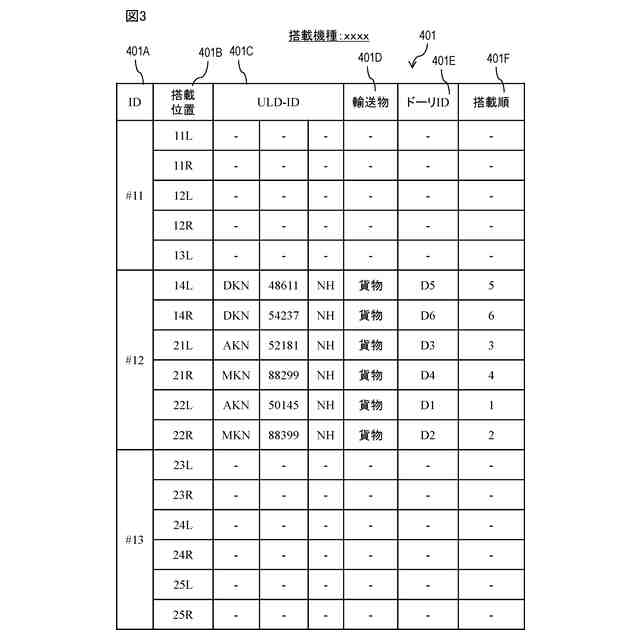
前記1又は複数のコントローラは、前記搭載処理において、前記複数のドーリに載置されている1又は複数の貨物を識別するための貨物データと、前記航空機において前記貨物が搭載されるべき位置を示す搭載指示データと、に基づいて、前記移載駆動装置を制御する
請求項2又は請求項3に記載のドーリシステム。
【請求項6】
前記コントローラは、前記搭載処理において、前記ドーリに搭載された貨物の向きを示すデータと、前記航空機において前記貨物が搭載されるべき位置を示す搭載指示データと、に基づいて、前記回転駆動装置による回転方向を制御する
請求項2又は請求項3に記載のドーリシステム。
【請求項7】
前記コントローラは、前記取卸処理において、前記カーゴローダ上での貨物の向きを識別するためのデータに基づいて、前記回転駆動装置による回転方向を制御する
請求項2又は請求項3に記載のドーリシステム。
【請求項8】
前記複数のドーリそれぞれは、
前記載置面に載置された貨物を固定するためのロックと、
前記コントローラからの信号に基づいて、前記ロックにロック動作及び解除動作をさせるロック駆動装置と、
を備え、
前記ロックは、前記貨物の大きさに合わせた位置で前記貨物をロック可能に構成され、
前記コントローラは、前記載置面に載置された貨物の大きさを識別するためのデータに基づいて、前記貨物の大きさに合わせた位置で前記貨物がロックされるよう前記ロック駆動装置を制御する
請求項1に記載のドーリシステム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ドーリシステムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
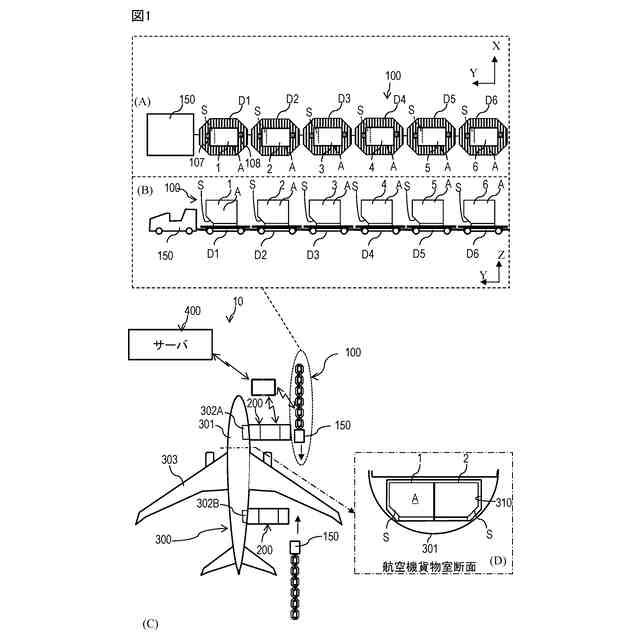
航空機のグランドハンドリングのための航空機地上支援機材(グランド・サポート・イクイップメント:GSE)の一つとして、ドーリがある。ドーリは、航空機の貨物の搬送用機材である。ドーリとしては、例えば、コンテナを搬送するコンテナドーリ(特許文献1参照)及びパレットを搬送するパレットドーリ(特許文献2)がある。
【0003】
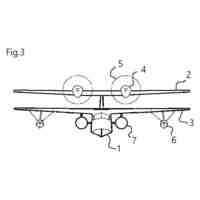
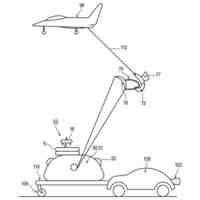
航空機の貨物の搭降載においては、航空機の貨物室の貨物搬入口に対して、ハイリフトローダなどのカーゴローダが装着される。カーゴローダは、貨物の搭降載のために航空機に装着される機側作業用機材である。
【0004】
航空機へ搭載される貨物は、ドーリによってカーゴローダまで搬送される。ドーリ上の貨物は、人力によってカーゴドーリへ移載される。カーゴローダは、ドーリから移載された貨物を、航空機の貨物室へ搬送する。また、航空機から降載される貨物は、貨物室から搬出され、カーゴローダによってドーリへ搬送される。
【0005】
なお、特許文献3は、航空コンテナ輸送用トレーラを開示している。特許文献3の航空コンテナ輸送用トレーラは、ドーリを介して車体幅方向から航空コンテナを積降し、空港外の道路を通って運搬するものであり、ドーリではない。
【先行技術文献】
【特許文献】
【0006】
特開平11-348840号公報
特開2008-230404号公報
特開2021-133865号公報
【発明の概要】
【0007】
従来、ドーリにおける貨物の取り扱いは、人力で行われており、作業者の負担が大きいという問題がある。例えば、作業者は、ドーリ上の貨物を、人力で押すといった力作業を行う必要がある。一般に、一つの貨物の重さは数百kg以上あるため、作業者の負担は非常に大きい。
【0008】
したがって、ドーリを用いた貨物の取り扱いにおいて、作業者の負担を軽減することが望まれる。
【0009】
本開示のある側面は、ドーリシステムである。開示のドーリシステムは、航空機の貨物の運搬に用いられるとともに、前記航空機に装着されたカーゴローダとの間で前記貨物が移載される。
【0010】
開示のドーリシステムは、連結部を介して直列に連結された複数のドーリと、前記複数のドーリを制御する1又は複数のコントローラと、を備え得る。前記複数のドーリそれぞれは、前記貨物が載置される載置面と、前記コントローラからの信号に基づき、前記載置面に載置された貨物を、前記複数のドーリにおいて隣接して連結された他のドーリへ移載するための駆動力を発生する移載駆動装置と、を備え得る。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
ドローン
3か月前
個人
着火ドローン
15日前
個人
救難消防飛行艇
25日前
個人
ドローンシステム
4か月前
株式会社三圓
浮上装置
9か月前
個人
陸海空用の乗り物
2か月前
個人
連続回転可能な飛行機翼
1か月前
個人
垂直離着陸機用エンジン改
4か月前
個人
ドローンの計測操作方法2
9か月前
個人
ドローンの計測操作方法3
9か月前
個人
飛行艇
11か月前
キヤノン電子株式会社
磁気トルカ
10か月前
個人
ドローンを自動離着陸する方法
5か月前
個人
空中移動システム
6か月前
個人
ドローン消音装置
7か月前
個人
エアライナー全自動パラシュート
3か月前
トヨタ自動車株式会社
ドローン
2か月前
個人
搬送方法および搬送システム
11日前
株式会社ACSL
システム
3か月前
合同会社アドエア
飛行体の落下補助装置
5か月前
株式会社小糸製作所
飛行体ポート
1か月前
合同会社アドエア
パラシュート射出装置
3か月前
個人
ヘリコプター駆動装置
9日前
株式会社ACSL
システム
3か月前
個人
パラボラ型スペースデブリカタパルト
4日前
株式会社SUBARU
移動体
6か月前
個人
垂直離着陸機用ガスタービンエンジン
4か月前
全日本空輸株式会社
ドーリシステム
8か月前
川崎重工業株式会社
水素航空機
1か月前
ミネベアミツミ株式会社
無人機
2か月前
ミネベアミツミ株式会社
無人機
2か月前
HDサービス合同会社
カメラ装着装置
7か月前
管清工業株式会社
地中管内の調査装置
28日前
本田技研工業株式会社
移動体
10か月前
株式会社小糸製作所
航空機用灯具
9か月前
株式会社SUBARU
構造体の製造方法
9か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ