TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024146322
公報種別
公開特許公報(A)
公開日
2024-10-15
出願番号
2023059145
出願日
2023-03-31
発明の名称
調整方法及び調整治具
出願人
株式会社東京精密
代理人
個人
,
個人
,
個人
,
個人
主分類
H01L
21/677 20060101AFI20241004BHJP(基本的電気素子)
要約
【課題】ウェーハ搬送装置の調整における自動化が実現される、調整方法及び調整治具を提供する。
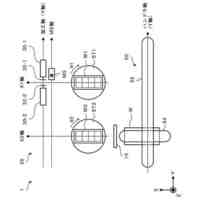
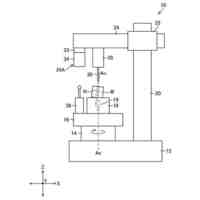
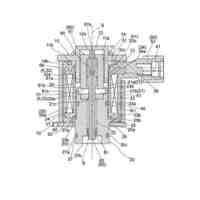
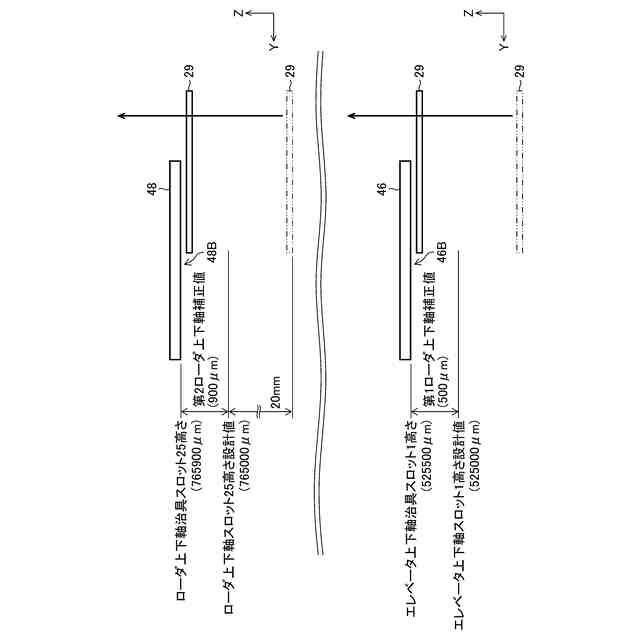
【解決手段】調整方法は、ウェーハ設置部(12)へ調整治具(40)を設置し、第1移動装置を用いて上下方向へ移動自在に支持されるセンサ(32)を用いて、上下方向における第1プレート(46)位置を測定し、搬送部に具備される第2移動装置を用いて上下方向へ移動自在に支持される搬送ユニットを用いて、上下方向における第1プレートの位置を測定し、センサを用いて測定される上下方向における第1プレートの位置、及び搬送ユニットを用いて測定される上下方向における第1プレートの位置に基づき、ウェーハ設置部と搬送部との上下方向における位置を調整する。
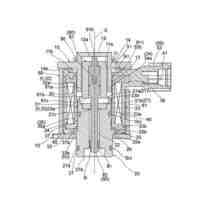
【選択図】図3
特許請求の範囲
【請求項1】
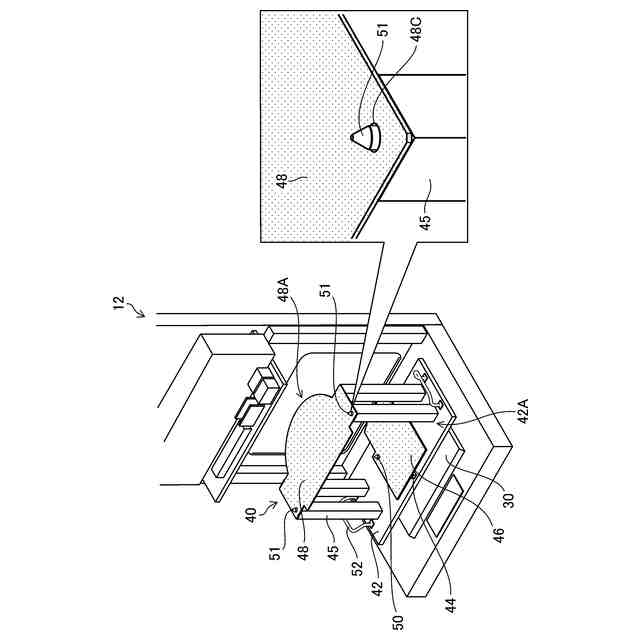
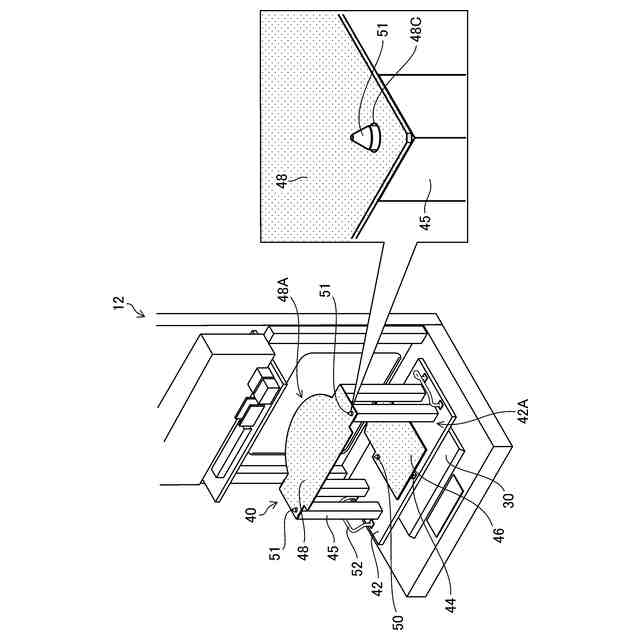
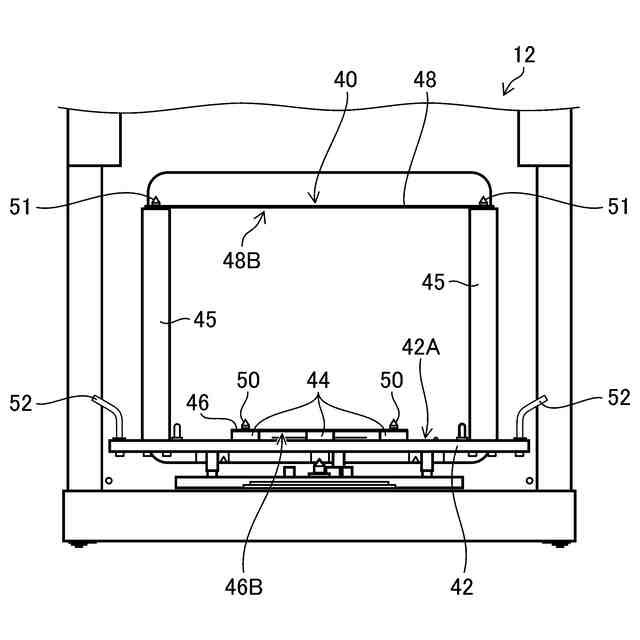
ウェーハカセットの第1スロットに対応する上下方向の位置を有する第1プレート、及び前記ウェーハカセットの第1スロットよりも上に配置される第2スロットに対応する前記上下方向の位置を有する第2プレートを備えた調整治具を用いて、前記ウェーハカセットが設置されるウェーハ設置部と、前記ウェーハカセットからウェーハを取り出す搬送ユニットが具備される搬送部との前記上下方向の位置を調整する調整方法であって、
前記ウェーハ設置部へ、前記調整治具を設置し、
前記ウェーハ設置部に具備される第1移動装置を用いて前記上下方向へ移動自在に支持されるセンサを用いて、前記上下方向における前記第1プレートの位置を測定し、
前記搬送部に具備される第2移動装置を用いて前記上下方向へ移動自在に支持される搬送ユニットを用いて、前記上下方向における前記第1プレートの位置を測定し、
前記センサを用いて測定される前記上下方向における前記第1プレートの位置、及び前記搬送ユニットを用いて測定される前記上下方向における前記第1プレートの位置に基づき、前記ウェーハ設置部と前記搬送部との前記上下方向における位置を調整する調整方法。
続きを表示(約 1,600 文字)
【請求項2】
前記上下方向における前記第1プレートの位置、又は前記上下方向における前記第2プレートの位置を測定する際に、
前記第1プレート又は前記第2プレートと、前記搬送ユニットに具備される前記ウェーハを保持するウェーハ保持アームと、を前記上下方向に沿って相対移動させ、
前記ウェーハ保持アームが前記第1プレート、又は前記第2プレートと接触する位置を、接触の有無を識別するセンサによって検出する請求項1に記載の調整方法。
【請求項3】
前記センサは、前記ウェーハ保持アームの吸着圧力がしきい値以上か否かに基いて、接触の有無を識別する請求項2に記載の調整方法。
【請求項4】
前記搬送ユニットを用いて、前記上下方向における前記第2プレートの位置を測定し、
前記センサを用いて測定される前記上下方向における前記第1プレートの位置、前記搬送ユニットを用いて測定される前記上下方向における前記第1プレートの位置、及び前記搬送ユニットを用いて測定される前記上下方向における前記第2プレートの位置に基づき、前記上下方向に対する前記搬送部の傾斜を補正する請求項1に記載の調整方法。
【請求項5】
前記搬送ユニットを用いて測定される前記上下方向における前記第2プレートの位置を測定する際に、
第1搬送分解能を適用して、前記第2プレートと、前記搬送ユニットに具備される前記ウェーハを保持するウェーハ保持アームと、を前記上下方向に沿って相対移動させ、
前記ウェーハ保持アームが前記第2プレートと接触する位置を、第2プレートの位置として検出する請求項4に記載の調整方法。
【請求項6】
前記搬送ユニットを用いて測定される前記上下方向における前記第2プレートの位置を測定する際に、
前記第2プレートに接触する前記ウェーハ保持アームを前記第2プレートから離間させ、
前記第1搬送分解能よりも小さい第2搬送分解能を適用して、前記第2プレートと前記ウェーハ保持アームとを相対移動させ、
前記ウェーハ保持アームが前記第2プレートと接触する位置を、第2プレートの位置として検出する請求項5に記載の調整方法。
【請求項7】
光学センサが適用される前記センサを用いて、前記上下方向における前記第1プレートの位置を測定する請求項1に記載の調整方法。
【請求項8】
前記搬送ユニットを用いて測定される前記上下方向における前記第1プレートの位置を測定する際に、
第3搬送分解能を適用して、前記第1プレートと前記搬送ユニットに具備される前記ウェーハを保持するウェーハ保持アームと前記上下方向に沿って相対移動させ、
前記ウェーハ保持アームが前記第1プレートと接触する位置を、第1プレートの位置として検出する請求項1に記載の調整方法。
【請求項9】
前記搬送ユニットを用いて測定される前記上下方向における前記第1プレートの位置を測定する際に、前記第1プレートに接触する前記ウェーハ保持アームを前記第1プレートから離間させ、
前記第3搬送分解能よりも小さい第4搬送分解能を適用して、前記第1プレートと前記ウェーハ保持アームとを相対移動させ、
前記ウェーハ保持アームが前記第1プレートと接触する位置を、第1プレートの位置として検出する請求項8に記載の調整方法。
【請求項10】
ウェーハカセットの第1スロットに対応する上下方向の位置を有する第1プレートと、
前記ウェーハカセットの第1スロットよりも上に配置される第2スロットに対応する前記上下方向の位置を有する第2プレートと、
を備え、
前記第1プレート及び前記第2プレートは、前記上下方向について移動自在に支持され、かつ、前記上下方向と直交する面における位置が固定される調整治具。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ウェーハ搬送装置における調整方法及び調整治具に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
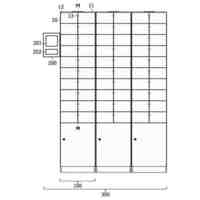
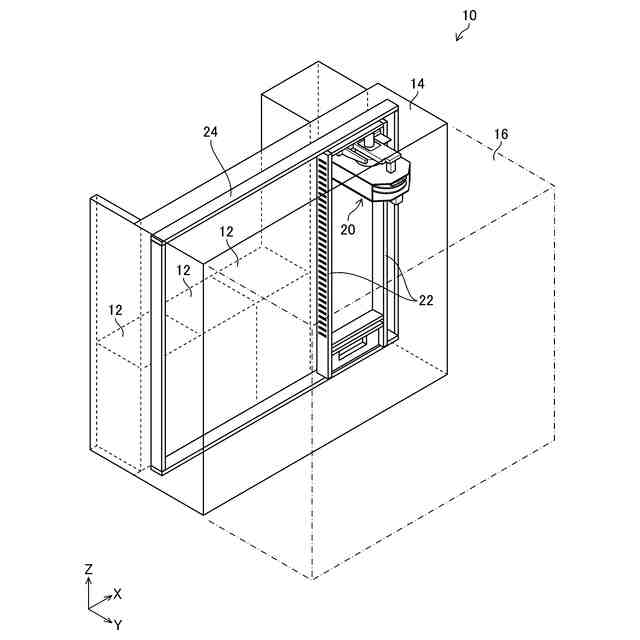
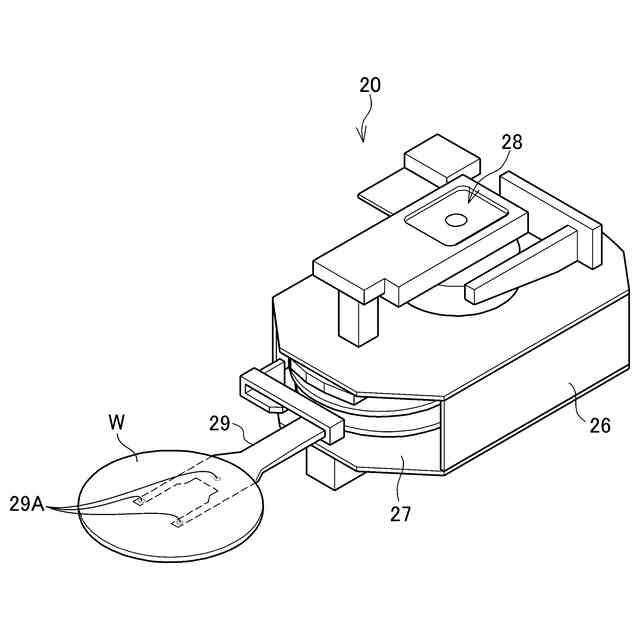
半導体製造装置において、ウェーハカセットからウェーハを取り出す必要がある。ウェーハカセットにおけるウェーハ同士の間隔は10ミリメートルと非常に狭く、上下に隣り合うウェーハの間へウェーハ保持アームを挿入し、ウェーハ保持アームを用いてウェーハを支持してウェーハカセットからウェーハを取り出すため、装置ごとにウェーハカセットに対するウェーハ保持アームの挿入位置の調整が必要となる。
【0003】
従来は、装置が組み立てられた後に、ウェーハカセットの一番下のスロットの位置が高精度に再現されるプレートと、ウェーハカセットの一番上のスロットの位置が高精度に再現されるプレートとを備える治具を用意し、ロードポート上へ治具を載置し、ウェーハ搬送装置のウェーハ保持アームを治具へ挿入して各プレートの下面とウェーハ保持アームとが接触する位置を測定し、測定結果に基づいてウェーハをウェーハ保持アームへ受け渡す受け渡し高さが調整される。
【0004】
特許文献1は、ウェーハカセットへウェーハを移送するウェーハ移送装置の調整方法が記載される。同文献に記載の方法は、ウェーハカセットの基準となる精度を備えたウェーハ保持治具を用いて、ウェーハ移送装置の調整を実施する。
【先行技術文献】
【特許文献】
【0005】
特開平10-242245号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上記した従来の方法は工数がかかるという課題が存在する。また、上記した従来の方法は、作業者の感覚で調整が実施される場合があり、作業者の個人差が調整結果に対して影響する懸念があるという課題が存在している。
【0007】
特許文献1に記載の方法は、ウェーハ又はウェーハの相当品が収納されるウェーハ保持治具が使用されるので、ウェーハ等をウェーハ保持治具へ収納する工程が発生し、工数がかかる。
【0008】
本発明はこのような事情に鑑みてなされたものであり、ウェーハ搬送装置の調整における自動化が実現される、調整方法及び調整治具を提供することを目的とする。
【課題を解決するための手段】
【0009】
本開示の第1態様に係る調整方法は、ウェーハカセットの第1スロットに対応する上下方向の位置を有する第1プレート、及びウェーハカセットの第1スロットよりも上に配置される第2スロットに対応する上下方向の位置を有する第2プレートを備えた調整治具を用いて、ウェーハカセットが設置されるウェーハ設置部と、ウェーハカセットからウェーハを取り出す搬送ユニットが具備される搬送部との上下方向の位置を調整する調整方法であって、ウェーハ設置部へ、調整治具を設置し、ウェーハ設置部に具備される第1移動装置を用いて上下方向へ移動自在に支持されるセンサを用いて、上下方向における第1プレートの位置を測定し、搬送部に具備される第2移動装置を用いて上下方向へ移動自在に支持される搬送ユニットを用いて、上下方向における第1プレートの位置を測定し、センサを用いて測定される上下方向における第1プレートの位置、及び搬送ユニットを用いて測定される上下方向における第1プレートの位置に基づき、ウェーハ設置部と搬送部との上下方向における位置を調整する調整方法。ウェーハ搬送装置調整方法である。
【0010】
本開示の第1態様に係る調整方法によれば、ウェーハ設置部へ設置される調整治具の第1プレートの位置を、ウェーハ設置部に具備されるセンサを用いて測定し、かつ、搬送部に具備される搬送ユニットを用いて測定し、測定結果に基づきウェーハ設置部と搬送部との上下方向における位置が調整される。これにより、ウェーハ設置部と搬送部との上下方向における位置調整の自動化が実現される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東京精密
ワーク加工装置
1か月前
株式会社東京精密
ワーク加工方法
1か月前
株式会社東京精密
調整方法及び調整治具
1か月前
株式会社東京精密
プローバ及び温度測定方法
1か月前
株式会社東京精密
保管ロッカー及び保管システム
14日前
株式会社東京精密
レーザ照射装置及び方法並びにレーザ加工装置
7日前
株式会社東京精密
ウェーハチャック、温度制御システム及び温度制御方法
13日前
株式会社東京精密
ブラシ洗浄装置
13日前
株式会社東京精密
マルチプローバ
1か月前
株式会社東京精密
形状測定機の校正方法
9日前
株式会社東京精密
ワーク検査方法及び装置
17日前
株式会社東京精密
アライメント装置及び方法
13日前
株式会社東京精密
ウェーハ加工方法及びシステム
1か月前
株式会社東京精密
加工状態検出装置、加工状態検出方法、プログラム、ダイシング装置及び学習モデル生成方法
1か月前
株式会社東京精密
ウェーハチャック、温度制御システム及び温度制御方法
今日
株式会社東京精密
内面形状測定機、及び内面形状測定機のアライメント方法
7日前
株式会社東栄科学産業
電磁石、及び磁場印加システム
1か月前
株式会社東京精密
セグメントコイルの剥離検査方法及びそれに用いる剥離検査装置
1か月前
株式会社東京精密
ウェハテストシステム、プローブカード交換方法、及びプローバ
28日前
株式会社ADEKA
全固体二次電池
6日前
株式会社GSユアサ
蓄電装置
6日前
トヨタ自動車株式会社
蓄電装置
6日前
三菱電機株式会社
アンテナ装置
今日
トヨタ自動車株式会社
電池パック
今日
トヨタ自動車株式会社
電池パック
7日前
三菱電機株式会社
半導体装置
7日前
トヨタ自動車株式会社
電池及び電極
今日
マクセル株式会社
全固体電池
今日
日本航空電子工業株式会社
コネクタ
7日前
株式会社ミクニ
電磁アクチュエータ
7日前
矢崎総業株式会社
端子
1日前
株式会社ミクニ
電磁アクチュエータ
7日前
日本圧着端子製造株式会社
コネクタ
今日
株式会社ミクニ
電磁アクチュエータ
7日前
三菱電機株式会社
半導体装置
7日前
株式会社ミクニ
電磁アクチュエータ
7日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ