TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024136159
公報種別
公開特許公報(A)
公開日
2024-10-04
出願番号
2023047164
出願日
2023-03-23
発明の名称
情報出力装置、学習済モデル生成装置、プログラム、学習済モデル、及び操作指示情報生成方法
出願人
五洋建設株式会社
,
東亜建設工業株式会社
,
東洋建設株式会社
,
株式会社小島組
,
株式会社エス・ケー・ケー
代理人
弁理士法人 HARAKENZO WORLD PATENT & TRADEMARK
主分類
E02F
3/47 20060101AFI20240927BHJP(水工;基礎;土砂の移送)
要約
【課題】海上土木作業のための作業船上の重機への操作指示情報の生成において、当該重機の動作により作業船に与える動揺と、波、風などの外力により作業船に生ずる動揺との影響を考慮する。
【解決手段】情報出力装置(10)は、重機を載置した第2の作業船の仕様を表す情報及び海上土木作業を行っていない状態における当該第2の作業船の動揺特性と、当該第2の作業船上の重機の動作を表す時系列データとを用いた機械学習により生成された学習済モデルに、海上土木作業を行っていない状態の第1の作業船の動揺特性と当該第1の作業船の仕様を表す情報とを入力することにより、第1の作業船上の重機を操作するための操作指示情報を生成する生成部(113)を備える。
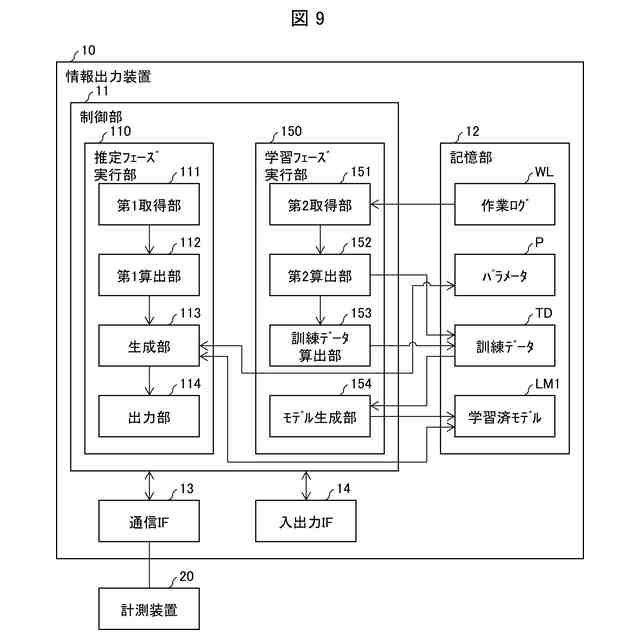
【選択図】図9
特許請求の範囲
【請求項1】
海上土木作業を行う重機を載置した第1の作業船の動揺を計測する前記第1の作業船の所定の位置に取り付けられた計測装置が計測した、当該第1の作業船が前記海上土木作業を行っていない状態における当該第1の作業船の動揺を表す時系列データを取得する取得部と、
前記時系列データを解析し、前記第1の作業船の動揺特性を算出する算出部と、
(i)重機を載置した第2の作業船の仕様を表す情報及び海上土木作業を行っていない状態における当該第2の作業船に取り付けられた計測装置が計測した前記第2の作業船の動揺を表す時系列データに基づき分析した前記第2の作業船の作業していないときの動揺特性と、
(ii)前記第2の作業船上の重機が海上土木作業の動作を行っているときの当該重機の動作を表すオペレータの操作の時系列データと、
を用いて前記第2の作業船上の重機による海上土木作業中の前記第2の作業船に生ずる動揺における外力による動揺と前記オペレータの操作による前記重機がもたらす動揺とが合わさった合計動揺と、当該第2の作業船上の重機に対してなされた操作内容との相関関係を機械学習させることにより生成された学習済モデルと、
前記学習済モデルに前記算出部が算出した海上土木作業を行っていない状態の前記第1の作業船の動揺特性と前記第1の作業船の仕様を表す情報とを入力することにより、前記第1の作業船上の重機を操作するための操作指示情報を生成する生成部と、
を備えることを特徴とする情報出力装置。
続きを表示(約 1,500 文字)
【請求項2】
前記操作内容を表す情報は、前記第2の作業船に対してなされた操作指示情報と時刻との関係を定式化した関数に含まれるパラメータを含む、
請求項1に記載の情報出力装置。
【請求項3】
前記動揺特性は、作業船の動揺振幅、動揺周期、及び位相差、の少なくともひとつを含む、
請求項1又は2に記載の情報出力装置。
【請求項4】
前記学習済モデルは、作業船の仕様に関する情報及び、作業船の動揺特性を入力とし、作業船上の重機に対する操作指示情報と時刻との関係を表す関数に含まれるパラメータを出力とする学習済モデルであり、
前記生成部は、前記算出部が算出した動揺特性と前記第1の作業船の仕様に関する情報とを前記学習済モデルに入力して得られるパラメータを用いて、前記操作指示情報を生成する、
請求項1又は2に記載の情報出力装置。
【請求項5】
前記学習済モデルに、さらに前記第2の作業船の動揺を表す時系列データと、前記第2の作業船上の重機による動作とを入力データとし、
前記生成部は、熟練オペレータによる前記動揺の数値に応じた前記第2の作業船上の重機への操作指示情報を出力データとする教師データを用いて機械学習させることにより生成された学習済モデルを用いて前記操作指示情報を生成する
請求項4に記載の情報出力装置。
【請求項6】
前記学習済モデルによる新たな作業船上の重機に対し前記生成部が生成した操作指示情報と、
前記新たな作業船上の重機に対する熟練オペレータの操作指示情報と、
を比較し、
前記熟練オペレータによる前記新たな作業船上の重機への操作指示情報と、
前記生成部が前記新たな作業船上の重機に対し生成した操作指示情報との相違量が閾値以内となる情報だけを再学習用の教師データとして用いて前記学習済モデルに再学習を行った再学習モデルを用いて、前記生成部が前記操作指示情報を生成する、
請求項5に記載の情報出力装置。
【請求項7】
前記操作指示情報は、重機の動作である吊持されたバケット又は重錘の昇降、前記バケットの開閉、及び前記重錘又は前記バケットを吊持する重機であるクレーンの旋回に対する速度、タイミング、角度及びブームの起伏角度を制御する情報、の少なくともいずれかひとつを含む、
請求項4に記載の情報出力装置。
【請求項8】
オペレータに代えて、前記生成部が生成した操作指示情報を用いて前記第1の作業船上の重機に海上土木作業を行わせる作業制御部、
を更に備える請求項1に記載の情報出力装置。
【請求項9】
海上土木作業を行う重機を載置した作業船の動揺を計測する前記作業船の所定の位置に取り付けられた計測装置が計測した、当該作業船が前記海上土木作業を行っていない状態における当該作業船の動揺を表す時系列データを取得する取得部と、
前記時系列データを解析し、前記作業船の動揺特性を算出する算出部と、
(i)前記作業船の仕様を表す情報及び前記算出部が算出した動揺特性と、(ii)当該作業船上の重機に対してなされた操作内容を表す情報と、の相関関係を機械学習させた学習済モデルを生成する生成部と、
を備えることを特徴とする学習済モデル生成装置。
【請求項10】
請求項1に記載の情報出力装置としてコンピュータを機能させるためのプログラムであって、前記取得部、前記算出部及び前記生成部としてコンピュータを機能させるためのプログラム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業船上の重機により海上土木作業を行うための技術に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
近年、土木作業の効率化、省力化を図るために建設機械(以降、重機ともいう。)の自動・自律化が進んでおり、海上工事においても作業船上の重機による自動・自律化も求められているが、海上工事における作業船上の重機の自動化は陸上で用いる重機の自動化と比較して難易度が高い。その主要因は、対象とする重機が作業船上に固定されていることで作業船上の重機を操作する際に付随して受ける波や風などによる作業船の動揺がある。作業船上の重機は、作業を停止していたとしても作業船に生ずる動揺によりクレーン等のブーム先端にワイヤー経由で吊持される浚渫用バケットや重錘が動揺するため、クレーン等の重機を作業船上で稼働させる際には作業船の動揺を考慮した操作が必要である。
【0003】
そのため、海上工事における作業船上の重機の稼働時には作業船の動揺を考慮した制御を行うことが提案されている。例えば特許文献1には、作業船の現時点から先の動揺を予測し、予測結果に基づき吊り荷を介して昇降させるウインチの回転速度を制御することにより、作業船が波浪により動揺しても、吊荷の動揺を抑制して作業効率を向上させることができる装置が記載されている。また、特許文献2には、風や波等による船体の揺れを加味した振れ止め制御を行うために、作業船の揺れを検出し、検出した揺れに基づきトロリに加える加速度パターンを補正し、補正後の加速度パターンに従ってトロリを自動運転することが記載されている。
【先行技術文献】
【特許文献】
【0004】
特開2021-91529号公報
特開平10-329787号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、作業船に生ずる動揺には、波や風などの外力に起因する動揺だけではなく、作業船上に設置した重機による作業、例えばクレーンの旋回等の作業に起因する動揺も含まれる。これらの両方が組み合わさった動揺を考慮して作業船上の重機を操作する必要があるが、そのような操作は困難であり、特に経験の浅い者が適切に操作することは困難である。また、特許文献1に記載の技術は、過去の動揺波形の計測データを用いて現時点から先の動揺波形を予測するが、重機を用いた海上工事の作業状況が異なると作業起因の動揺の態様は異なるため、異なる作業を行う場合の作業船に生ずる動揺を過去の計測データから適切に予測することはできない。また、特許文献2に記載の技術でも、作業起因の動揺については考慮されていないため、作業起因の動揺の影響を考慮した補正を行うことはできない。
【0006】
本発明の一態様は、上記問題点に鑑みたものである。本発明の一態様は、海上土木作業のための作業船上の重機への操作指示情報において、当該重機の動作により作業船に与える動揺と、波、風などの外力により作業船に生ずる動揺との影響を考慮した操作指示情報を生成できる技術を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記の課題を解決するために、本発明の一態様に係る情報出力装置は、海上土木作業を行う重機を載置した第1の作業船の動揺を計測する前記第1の作業船の所定の位置に取り付けられた計測装置が計測した、当該第1の作業船が前記海上土木作業を行っていない状態における当該第1の作業船の動揺を表す時系列データを取得する取得部と、前記時系列データを解析し、前記第1の作業船の動揺特性を算出する算出部と、(i)重機を載置した第2の作業船の仕様を表す情報及び海上土木作業を行っていない状態における当該第2の作業船に取り付けられた計測装置が計測した前記第2の作業船の動揺を表す時系列データに基づき分析した前記第2の作業船の作業していないときの動揺特性と、(ii)前記第2の作業船上の重機が海上土木作業の動作を行っているときの当該重機の動作を表すオペレータの操作の時系列データと、を用いて前記第2の作業船上の重機による海上土木作業中の前記第2の作業船に生ずる動揺における外力による動揺と前記オペレータの操作による前記重機がもたらす動揺とが合わさった合計動揺と、当該第2の作業船上の重機に対してなされた操作内容との相関関係を機械学習させることにより生成された学習済モデルと、前記学習済モデルに前記算出部が算出した海上土木作業を行っていない状態の前記第1の作業船の動揺特性と前記第1の作業船の仕様を表す情報とを入力することにより、前記第1の作業船上の重機を操作するための操作指示情報を生成する生成部と、を備える。
【0008】
上記の構成によれば、海上土木作業のための作業船上の重機への操作指示情報において、当該重機の動作により作業船に与える動揺と、波、風などの外力により作業船に生ずる動揺との影響を考慮した操作指示情報を生成することができる。
【0009】
上記情報出力装置において、前記操作内容を表す情報は、前記第2の作業船に対してなされた操作指示情報と時刻との関係を定式化した関数に含まれるパラメータを含んでもよい。
【0010】
上記の構成によれば、作業船の外力による動揺と関数に含まれるパラメータとの相関関係を機械学習させた学習済モデルを用いることにより特定される関数を用いて、作業船に生ずる動揺の影響を考慮した操作指示情報を生成できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
五洋建設株式会社
構造物の免震支承構造、免震構造物の構築方法及び免震構造物の改修方法
13日前
五洋建設株式会社
損傷度予測装置、損傷度予測方法、学習済モデルの生成方法、及び学習済モデル
9日前
五洋建設株式会社
浸透固化処理工法の注入管理方法、注入管理システム、これらを用いた地盤改良工法およびコンピュータプログラム
9日前
日鉄建材株式会社
土砂捕捉柵
13日前
日鉄建材株式会社
土砂捕捉柵
13日前
株式会社高知丸高
仮締切構造体
1日前
大和ハウス工業株式会社
バケット
13日前
日本ソリッド株式会社
防舷材の保護方法
7日前
株式会社パルパルス
抜け止め装置
15日前
日立建機株式会社
建設機械
14日前
日立建機株式会社
作業機械
13日前
日立建機株式会社
作業機械
15日前
日立建機株式会社
作業機械
6日前
株式会社テノックス
共回り監視装置
9日前
株式会社西原鉄工所
コンクリートブロック
9日前
株式会社テノックス
深層混合処理工法
9日前
西部電機株式会社
水門開閉装置
6日前
株式会社日立建機ティエラ
作業機械
13日前
株式会社日立建機ティエラ
建設機械
13日前
炎重工株式会社
桟橋及び移動体システム
13日前
C技研株式会社
切削装置
9日前
日立建機株式会社
建設機械
14日前
日立建機株式会社
建設機械
14日前
日立建機株式会社
建設機械
14日前
コベルコ建機株式会社
作業機械の制御装置
14日前
鹿島建設株式会社
運搬機構および管体の搬送方法
7日前
ヤンマーホールディングス株式会社
作業機械
14日前
ヤンマーホールディングス株式会社
建設機械
14日前
日鉄建材株式会社
梁部材の取付構造及び土砂捕捉柵
13日前
日立建機株式会社
作業機械
14日前
日立建機株式会社
作業機械
14日前
日立建機株式会社
作業機械
13日前
日立建機株式会社
作業車両
13日前
日立建機株式会社
作業機械
13日前
日立建機株式会社
作業機械
15日前
日立建機株式会社
作業車両
13日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ