TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024136142
公報種別
公開特許公報(A)
公開日
2024-10-04
出願番号
2023047134
出願日
2023-03-23
発明の名称
多軸実装センサシステム
出願人
株式会社豊田中央研究所
,
株式会社デンソー
,
株式会社ミライズテクノロジーズ
,
トヨタ自動車株式会社
代理人
弁理士法人 快友国際特許事務所
主分類
G01C
19/00 20130101AFI20240927BHJP(測定;試験)
要約
【課題】検出精度が改善された多軸実装センサシステムを提供する。
【解決手段】多軸実装センサシステムは、台座と、台座に取り付けられ傾斜面を有する第1-第4ブロックと、を備える。多軸実装センサシステムは、傾斜面に配置されており、第1-第4角速度を測定可能な、第1-第4一軸慣性力センサを備える。多軸実装センサシステムは、第1-第4ピッチ角および第1-第4ロール角を記憶可能に構成されている記憶部を備える。多軸実装センサシステムは、第1-第4角速度に基づいて、3軸角速度を算出する演算部を備える。演算部は、第1-第4ピッチ角および第1-第4ロール角の少なくとも一方に基づいて、第1-第4角速度を補正する第1補正機能を備える。演算部は、第1-第4ピッチ角に基づいて、3軸角速度を補正する第2補正機能を備える。
【選択図】図1
特許請求の範囲
【請求項1】
平面を備える台座であって、前記平面に含まれる直交するx軸およびy軸と、前記平面に垂直なz軸と、からなる直交3軸座標系を備える台座と、
前記台座に取り付けられ、前記平面に対して傾斜している傾斜面を有する第1-第4ブロックであって、前記第1ブロックおよび前記第2ブロックは前記x軸方向に整列しており、前記第3ブロックおよび前記第4ブロックは前記y軸方向に整列している、前記第1-第4ブロックと、
前記第1ブロックの傾斜面に配置されており、第1測定軸周りの第1角速度を測定可能な第1一軸慣性力センサと、
前記第2ブロックの傾斜面に配置されており、第2測定軸周りの第2角速度を測定可能な第2一軸慣性力センサと、
前記第3ブロックの傾斜面に配置されており、第3測定軸周りの第3角速度を測定可能な第3一軸慣性力センサと、
前記第4ブロックの傾斜面に配置されており、第4測定軸周りの第4角速度を測定可能な第4一軸慣性力センサと、
第1-第4ピッチ角および第1-第4ロール角を記憶可能に構成されている記憶部であって、
前記第1ピッチ角は、前記第1測定軸が前記平面となす角度と予め定められた所定角度との角度差であり、
前記第2ピッチ角は、前記第2測定軸が前記平面となす角度と前記所定角度との角度差であり、
前記第3ピッチ角は、前記第3測定軸が前記平面となす角度と前記所定角度との角度差であり、
前記第4ピッチ角は、前記第4測定軸が前記平面となす角度と前記所定角度との角度差であり、
前記第1ロール角は、前記第1測定軸を前記平面に投射した投射軸が前記x軸となす角度であり、
前記第2ロール角は、前記第2測定軸を前記平面に投射した投射軸が前記x軸となす角度であり、
前記第3ロール角は、前記第3測定軸を前記平面に投射した投射軸が前記y軸となす角度であり、
前記第4ロール角は、前記第4測定軸を前記平面に投射した投射軸が前記y軸となす角度である、前記記憶部と、
前記第1-第4角速度に基づいて、前記直交3軸座標系における3軸角速度を算出する演算部と、
を備える多軸実装センサシステムであって、
前記演算部は、
前記第1-第4ピッチ角および前記第1-第4ロール角の少なくとも一方に基づいて、前記第1-第4角速度を補正する第1補正機能と、
前記第1-第4ピッチ角に基づいて、前記3軸角速度を補正する第2補正機能と、
を実行可能に構成されている、多軸実装センサシステム。
続きを表示(約 1,500 文字)
【請求項2】
前記演算部は、
前記第1補正機能による補正が行われていない補正前の前記第1-第4角速度に基づいて1回目の前記3軸角速度を算出し、
1回目の前記3軸角速度、および、前記第1-第4ピッチ角および前記第1-第4ロール角の少なくとも一方に基づいて、前記第1-第4角速度に対して前記第1補正機能による補正を行い、
前記第1補正機能による補正が行われた補正後の前記第1-第4角速度に基づいて、2回目の前記3軸角速度を算出する、請求項1に記載の多軸実装センサシステム。
【請求項3】
前記第1補正機能では、
1回目の前記3軸角速度に含まれるy軸周り角速度と前記第1ロール角に基づいて、前記第1角速度を補正し、
1回目の前記3軸角速度に含まれるy軸周り角速度と前記第2ロール角に基づいて、前記第2角速度を補正し、
1回目の前記3軸角速度に含まれるx軸周り角速度と前記第3ロール角に基づいて、前記第3角速度を補正し、
1回目の前記3軸角速度に含まれるx軸周り角速度と前記第4ロール角に基づいて、前記第4角速度を補正する、
請求項2に記載の多軸実装センサシステム。
【請求項4】
前記第1補正機能では、
1回目の前記3軸角速度に含まれるy軸周り角速度に前記第1ロール角の正弦値を乗じて得られた値を、前記第1角速度から減じることによって、前記第1角速度を補正し、
1回目の前記3軸角速度に含まれるy軸周り角速度に前記第2ロール角の正弦値を乗じて得られた値を、前記第2角速度から減じることによって、前記第2角速度を補正し、
1回目の前記3軸角速度に含まれるx軸周り角速度に前記第3ロール角の正弦値を乗じて得られた値を、前記第3角速度から減じることによって、前記第3角速度を補正し、
1回目の前記3軸角速度に含まれるx軸周り角速度に前記第4ロール角の正弦値を乗じて得られた値を、前記第4角速度から減じることによって、前記第4角速度を補正する、
請求項3に記載の多軸実装センサシステム。
【請求項5】
前記第1補正機能では、前記第1-第4ピッチ角に基づいて前記第1-第4角速度を補正し、
前記演算部では、
補正後の前記第1-第4角速度に基づいて、x軸周り角速度、y軸周り角速度、z軸周り角速度からなる前記3軸角速度を算出し、
前記第2補正機能では、
前記第1-第4ピッチ角に基づいて、前記x軸周り角速度を補正するx軸補正係数、前記y軸周り角速度を補正するy軸補正係数、前記z軸周り角速度を補正するz軸補正係数、を算出し、
算出した前記x軸補正係数、前記y軸補正係数、前記z軸補正係数の各々に基づいて、前記x軸周り角速度、前記y軸周り角速度、前記z軸周り角速度を補正する、
請求項1に記載の多軸実装センサシステム。
【請求項6】
前記第1補正機能では、
前記第1角速度の前記z軸方向のベクトル成分および前記x軸方向のベクトル成分を前記第1ピッチ角に基づいて補正し、
前記第2角速度の前記z軸方向のベクトル成分および前記x軸方向のベクトル成分を前記第2ピッチ角に基づいて補正し、
前記第3角速度の前記z軸方向のベクトル成分および前記y軸方向のベクトル成分を前記第3ピッチ角に基づいて補正し、
前記第4角速度の前記z軸方向のベクトル成分および前記y軸方向のベクトル成分を前記第4ピッチ角に基づいて補正する、
請求項1に記載の多軸実装センサシステム。
発明の詳細な説明
【技術分野】
【0001】
本明細書が開示する技術は、多軸実装センサシステムに関する。
続きを表示(約 3,500 文字)
【背景技術】
【0002】
特許文献1に、4つの一軸ジャイロセンサを特定の位置関係で配置することにより、センサの出力値を3軸化するセンサシステム3が開示されている。これにより、XYZ直交3軸の角速度を検出することができる。
【先行技術文献】
【特許文献】
【0003】
特開2005-221284号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の技術では、4つのジャイロセンサの測定軸と水平平面とがなす角度が、全て等しいことを前提において、3軸化を行っている。従って、4つの角度に誤差が存在すると、3軸化により得られる角速度に誤差が生じてしまう。
【課題を解決するための手段】
【0005】
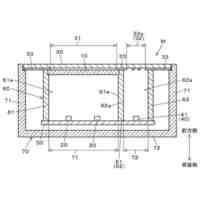
本明細書で開示する多軸実装センサシステムの一態様は、平面を備える台座を備える。台座は、平面に含まれる直交するx軸およびy軸と、平面に垂直なz軸と、からなる直交3軸座標系を備える。多軸実装センサシステムは、台座に取り付けられ、平面に対して傾斜している傾斜面を有する第1-第4ブロックを備える。第1ブロックおよび第2ブロックはx軸方向に整列しており、第3ブロックおよび第4ブロックはy軸方向に整列している。多軸実装センサシステムは、第1ブロックの傾斜面に配置されており、第1測定軸周りの第1角速度を測定可能な第1一軸慣性力センサを備える。多軸実装センサシステムは、第2ブロックの傾斜面に配置されており、第2測定軸周りの第2角速度を測定可能な第2一軸慣性力センサを備える。多軸実装センサシステムは、第3ブロックの傾斜面に配置されており、第3測定軸周りの第3角速度を測定可能な第3一軸慣性力センサを備える。多軸実装センサシステムは、第4ブロックの傾斜面に配置されており、第4測定軸周りの第4角速度を測定可能な第4一軸慣性力センサを備える。多軸実装センサシステムは、第1-第4ピッチ角および第1-第4ロール角を記憶可能に構成されている記憶部を備える。第1ピッチ角は、第1測定軸が平面となす角度と予め定められた所定角度との角度差である。第2ピッチ角は、第2測定軸が平面となす角度と所定角度との角度差である。第3ピッチ角は、第3測定軸が平面となす角度と所定角度との角度差である。第4ピッチ角は、第4測定軸が平面となす角度と所定角度との角度差である。第1ロール角は、第1測定軸を平面に投射した投射軸がx軸となす角度である。第2ロール角は、第2測定軸を平面に投射した投射軸がx軸となす角度である。第3ロール角は、第3測定軸を平面に投射した投射軸がy軸となす角度である。第4ロール角は、第4測定軸を平面に投射した投射軸がy軸となす角度である。第1-第4角速度に基づいて、直交3軸座標系における3軸角速度を算出する演算部と、
演算部は、第1-第4ピッチ角および第1-第4ロール角の少なくとも一方に基づいて、第1-第4角速度を補正する第1補正機能を備える。演算部は、第1-第4ピッチ角に基づいて、3軸角速度を補正する第2補正機能を備える。
【0006】
上記の構成によると、第1-第4一軸慣性力センサに、第1-第4ピッチ角や第1-第4ロール角が存在している場合においても、第1補正機能によって第1-第4角速度を補正することができる。また、第2補正機能によって、3軸角速度を補正することができる。従って、3軸角速度の誤差を抑制することが可能となる。
【図面の簡単な説明】
【0007】
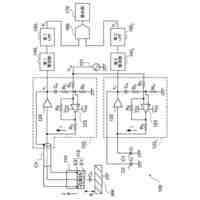
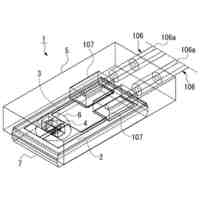
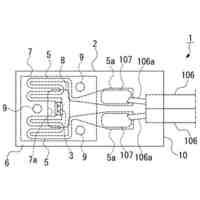
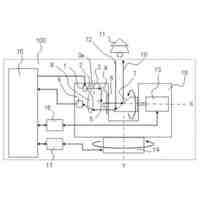
多軸実装センサシステム1の概略図を示す。
第2ロール角φ
2e
を説明する図である。
第2ピッチ角θ
2e
を説明する図である。
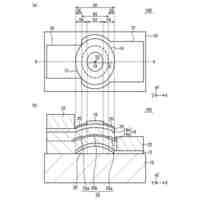
第3ジャイロセンサSE3の検出軸および非検出軸を説明する図である。
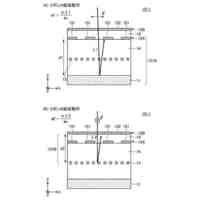
第3ロール角φ
3e
を変化させた場合における、3軸感度のグラフである。
第3ピッチ角θ
3e
を変化させた場合における、3軸感度のグラフである。
ロール角およびピッチ角がセンサ感度に与える影響をまとめた表である。
ロール角φおよびピッチ角θの影響の補正手法の基本概念を示す図である。
図8の基本概念をさらに具体化した中位概念を示す図である。
ロール角φ
e
が発生していない状態の第2ジャイロセンサSE2を示す図である。
ロール角φ
e
が発生している状態の第2ジャイロセンサSE2を示す図である。
第1補正機能C1_1の具体的な内容を説明するフロー図である。
第2ピッチ角θ
2e
が発生していない状態の第2ジャイロセンサSE2を示す図である。
第2ピッチ角θ
2e
が発生している状態の第2ジャイロセンサSE2を示す図である。
2軸ベクトルに分解する様子を示した図である。
補正後の2軸ベクトルを示す図である。
主軸感度の補正を説明する図である。
第1補正機能C1_2および第2補正機能C2の具体的な内容を説明するフロー図である。
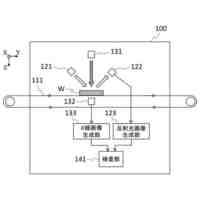
実施例2に係る多軸実装センサシステム101の概念図である。
【発明を実施するための形態】
【実施例】
【0008】
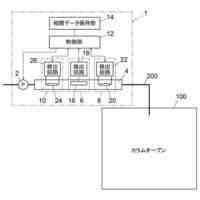
(多軸実装センサシステム1の構造)
図1に、多軸実装センサシステム1の概略図を示す。多軸実装センサシステム1は、x軸周り、y軸周り及びz軸周りの角速度を検知する、3軸角速度(ジャイロ)センサシステムである。多軸実装センサシステム1は、慣性力センサ2、演算部3、記憶部4、を主に備えている。慣性力センサ2は、いわゆる積み木式傾斜実装構造を備えている。慣性力センサ2は、台座11、第1ブロックB1-第4ブロックB4、第1ジャイロセンサSE1-第4ジャイロセンサSE4、を主に備えている。台座11は平面11pを備えている。台座11は、平面11pに含まれている直交するx軸およびy軸と、平面11pに垂直なz軸と、からなる直交3軸座標系を備えている。なお本明細書では、台座11を基準とした3軸座標系を、小文字のx、y、zで表している。また第1ブロックB1-第4ブロックB4を基準とした3軸座標系を、大文字のX、Y、Zで表している。
【0009】
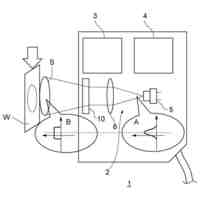
第1ブロックB1-第4ブロックB4は、台座11の平面11p上に取り付けられている。第1ブロックB1-第4ブロックB4の各々は、平面11pに対して傾斜している傾斜面B1p-B4pを有している。傾斜面B1p-B4pが平面11pとなす所定角度PAは、全て同一であり、本実施例では45度である。第1ブロックB1および第2ブロックB2は、x軸方向に整列しており、互いに対向している。第3ブロックB3および第4ブロックB4は、y軸方向に整列しており、互いに対向している。具体的には、第1ブロックB1の傾斜面B1pと第2ブロックB2の傾斜面B2p同士が、内向きになるように、x軸方向に並んで対向配置されている。また、第3ブロックB3の傾斜面B3pと第4ブロックB4の傾斜面B4p同士が、内向きになるように、y軸方向に並んで対向配置されている。
【0010】
第1ジャイロセンサSE1-第4ジャイロセンサSE4の各々は、第1ブロックB1-第4ブロックB4の傾斜面B1p-B4pに配置されている。第1ジャイロセンサSE1-第4ジャイロセンサSE4の各々は、搭載面(傾斜面B1p-B4p)に垂直な第1測定軸A
1z
-第4測定軸A
4z
を備えている。第1ジャイロセンサSE1は、第1測定軸A
1z
周りの第1角速度S
1
を測定可能である。第2ジャイロセンサSE2は、第2測定軸A
2Z
周りの第2角速度S
2
を測定可能である。第3ジャイロセンサSE3は、第3測定軸A
3Z
周りの第3角速度S
3
を測定可能である。第4ジャイロセンサSE4は、第4測定軸A
4Z
周りの第4角速度S
4
を測定可能である。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
日本精機株式会社
表示装置
9日前
株式会社コロナ
石油ストーブ
16日前
太陽誘電株式会社
センサ
12日前
アズビル株式会社
調節計
2日前
株式会社ヨコオ
プローブ
9日前
株式会社小野測器
測定器
2日前
株式会社小野測器
検出器
2日前
株式会社トプコン
測量装置
16日前
株式会社トプコン
測量装置
2日前
ユニパルス株式会社
距離測定装置
6日前
株式会社カネカ
検出システム
2日前
日本碍子株式会社
ガスセンサ
2日前
個人
変位測定装置
9日前
個人
二次電池繰返パルス放電器用基板
9日前
株式会社ナリス化粧品
肌状態推定方法
2日前
エイブリック株式会社
電流検出回路。
2日前
日本碍子株式会社
ガスセンサ素子
2日前
日本碍子株式会社
ガスセンサ素子
2日前
大和製衡株式会社
組合せ計量装置
17日前
日本特殊陶業株式会社
ガスセンサ
6日前
三菱マテリアル株式会社
温度センサ
12日前
ローム株式会社
磁気検出装置
17日前
オムロン株式会社
近接センサ
6日前
スズキ株式会社
車両後部構造
6日前
三菱マテリアル株式会社
温度センサ
6日前
株式会社デンソートリム
ガスセンサ
9日前
TDK株式会社
計測装置
6日前
東洋電装株式会社
角度検出装置
6日前
株式会社 システムスクエア
検査装置
16日前
株式会社島津製作所
GC用ガス監視装置
2日前
オムロン株式会社
光センサ
5日前
住友重機械工業株式会社
回転装置
3日前
セコム工業株式会社
物体検知装置
2日前
株式会社アイシン
回転体移動量検出装置
6日前
キヤノン株式会社
計測装置
6日前
富士通株式会社
光半導体デバイス
6日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ