TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024135562
公報種別
公開特許公報(A)
公開日
2024-10-04
出願番号
2023046316
出願日
2023-03-23
発明の名称
検出器
出願人
株式会社小野測器
代理人
個人
主分類
G01P
3/44 20060101AFI20240927BHJP(測定;試験)
要約
【課題】基準座標系に固定する必要のない検出器を提供する。
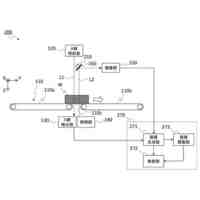
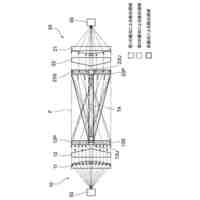
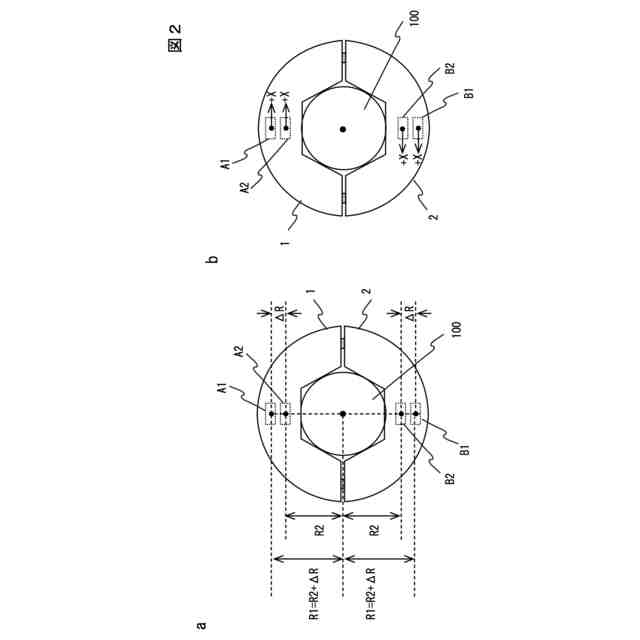
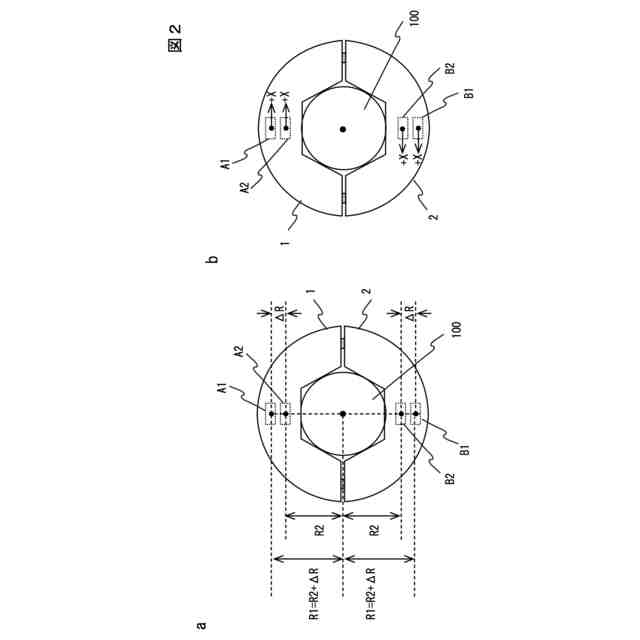
【解決手段】回転中心からの径方向の距離R1の位置に回転方向の角度差が180度となるように配置した加速度センサA1、B1と、回転中心からの径方向の距離R2の位置に回転方向の角度差が180度となるように配置した加速度センサA2、B2とで、回転軸100の周方向の加速度を検出する。加速度センサA1、B1の検出値の加算値の1/2として求まる周方向加速度pf1をR1で除して求まる距離R1の位置の角加速度と、加速度センサA2、B2の検出値の加算値の1/2として求まる距離R2の位置の周方向加速度をR2で除して求まる角加速度が等しいことを表す方程式に、既知のR1とR2の差ΔRを用いてR1を表すR1=R2+ΔRを代入して距離R2を求め、求めた距離R2と距離R2の位置の周方向加速度より角加速度を算定する。
【選択図】図2
特許請求の範囲
【請求項1】
回転軸に固定して使用される検出器であって、
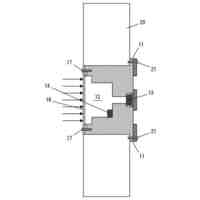
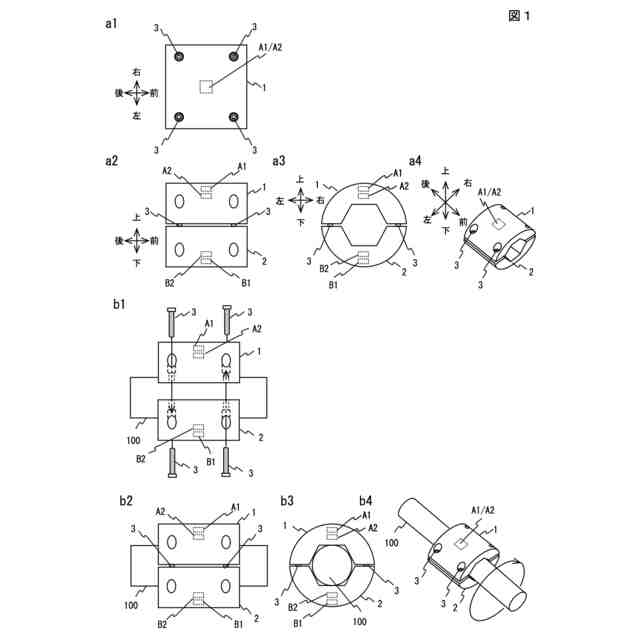
前記回転軸に当該回転軸と共に回転するように固定されるベースと、
前記ベースが前記回転軸に固定された状態において、前記回転軸の回転中心軸から見た回転軸の回転方向の角度差が180度となり、回転軸の回転中心軸からの回転軸の径方向の距離が等しくなるように前記ベースに固定された第1の加速度センサと第2の加速度センサと、
前記ベースが前記回転軸に固定された状態において、前記回転中心軸から見た前記回転方向の角度差が180度となり、前記回転中心軸からの回転軸の径方向の距離が等しくなるように前記ベースに固定された第3の加速度センサと第4の加速度センサと、
回転検出手段を有し、
前記ベースが前記回転軸に固定された状態における、前記第1の加速度センサ及び前記第2の加速度センサまでの前記回転中心軸からの回転軸の径方向の距離を第1の距離とし、前記第3の加速度センサ及び前記第4の加速度センサまでの前記回転中心軸からの回転軸の径方向の距離を第2の距離として、前記第1の距離と前記第2の距離の差である距離差が所定の大きさとなるように、前記第1の加速度センサと前記第2の加速度センサと前記第3の加速度センサと前記第4の加速度センサは前記ベースに固定されており、
前記ベースが前記回転軸に固定された状態において、前記第1の加速度センサと前記第2の加速度センサは、前記回転中心軸を中心とする円の周方向の、同じ周方向に対する正負が同じ加速度を検出し、前記第3の加速度センサと前記第4の加速度センサは、前記回転中心軸を中心とする円の周方向の、同じ周方向に対する正負が同じ加速度を検出し、
前記回転検出手段は、
前記ベースが前記回転軸に固定された状態において、
前記第1の加速度センサが検出した加速度を表す信号と第2の加速度センサが検出した加速度を表す信号とを加算した信号より、前記回転中心軸から前記径方向に前記第1の距離離れた位置の周方向加速度を第1の周方向加速度として算出し、
前記第3の加速度センサが検出した加速度を表す信号と第4の加速度センサが検出した加速度を表す信号とを加算した信号より、前記回転中心軸から前記径方向に前記第2の距離離れた位置の周方向加速度を第2の周方向加速度として算出し、
前記第1の周方向加速度と前記第2の周方向加速度の比が前記距離差によって生じているものとして、前記第1の距離と前記第2の距離の少なくとも一方を算定することを特徴とする検出器。
続きを表示(約 2,000 文字)
【請求項2】
請求項1記載の検出器であって、
前記第1の距離をR1、前記第2の距離をR2、前記距離差をΔRとして、R1=R2+ΔRであり、
前記回転検出手段は、
前記第1の周方向加速度をpf1、前記第2の周方向加速度をpf2として、
R1=[ΔR/{(pf1/pf2)-1}]+ΔR
による前記第1の距離R1の算定と、
R2=ΔR/{(pf1/pf2)-1}
による前記第2の距離R2の算定とのうちの少なくとも一方の算定を行うことを特徴とする検出器。
【請求項3】
請求項1または2記載の検出器であって、
前記回転検出手段は、前記第1の距離を算定し、算定した第1の距離と前記第1の周方向加速度から前記回転軸の角加速度を算定することを特徴とする検出器。
【請求項4】
請求項1または2記載の検出器であって、
前記回転検出手段は、前記第2の距離を算定し、算定した第2の距離と前記第2の周方向加速度から前記回転軸の角加速度を算定することを特徴とする検出器。
【請求項5】
回転軸に固定して使用される検出器であって、
前記回転軸に当該回転軸と共に回転するように固定されるベースと、
前記ベースが前記回転軸に固定された状態において、前記回転軸の回転中心軸から見た回転軸の回転方向の角度差が180度となり、回転軸の回転中心軸からの回転軸の径方向の距離が等しくなるように前記ベースに固定された第1の加速度センサと第2の加速度センサと、
前記ベースが前記回転軸に固定された状態において、前記回転中心軸から見た前記回転方向の角度差が180度となり、前記回転中心軸からの回転軸の径方向の距離が等しくなるように前記ベースに固定された第3の加速度センサと第4の加速度センサと、
回転検出手段を有し、
前記ベースが前記回転軸に固定された状態における、前記第1の加速度センサ及び前記第2の加速度センサまでの前記回転中心軸からの回転軸の径方向の距離を第1の距離とし、前記第3の加速度センサ及び前記第4の加速度センサまでの前記回転中心軸からの回転軸の径方向の距離を第2の距離として、前記第1の距離と前記第2の距離の差である距離差が所定の大きさとなるように、前記第1の加速度センサと前記第2の加速度センサと前記第3の加速度センサと前記第4の加速度センサは前記ベースに固定されており、
前記ベースが前記回転軸に固定された状態において、前記第1の加速度センサと前記第2の加速度センサは、前記回転中心軸を中心とする円の径方向の、当該円の中心に向かう方向の正負が同じ加速度を検出し、前記第3の加速度センサと前記第4の加速度センサは、前記回転中心軸を中心とする円の径方向の、当該円の中心に向かう方向の正負が同じ加速度を検出し、
前記回転検出手段は、
前記ベースが前記回転軸に固定された状態において、
前記第1の加速度センサが検出した加速度を表す信号と第2の加速度センサが検出した加速度を表す信号とを加算した信号より、前記回転中心軸から前記径方向に前記第1の距離離れた位置の遠心加速度を第1の遠心加速度として算出し、
前記第3の加速度センサが検出した加速度を表す信号と第4の加速度センサが検出した加速度を表す信号とを加算した信号より、前記回転中心軸から前記径方向に前記第2の距離離れた位置の遠心加速度を第2の遠心加速度として算出し、
前記第1の遠心加速度と前記第2の遠心加速度の比が前記距離差によって生じているものとして、前記第1の距離と前記第2の距離の少なくとも一方を算定することを特徴とする検出器。
【請求項6】
請求項5記載の検出器であって、
前記第1の距離をR1、前記第2の距離をR2、前記距離差をΔRとして、R1=R2+ΔRであり、
前記回転検出手段は、
前記第1の遠心加速度をcf1、前記第2の遠心加速度をcf2として、
R1=[ΔR/{(cf1/cf2)-1}]+ΔR
による前記第1の距離R1の算定と、
R2=ΔR/{(cf1/cf2)-1}
による前記第2の距離R2の算定とのうちの少なくとも一方の算定を行うことを特徴とする検出器。
【請求項7】
請求項5または6記載の検出器であって、
前記回転検出手段は、前記第1の距離を算定し、算定した第1の距離と前記第1の遠心加速度から前記回転軸の角速度を算定することを特徴とする検出器。
【請求項8】
請求項5または6記載の検出器であって、
前記回転検出手段は、前記第2の距離を算定し、算定した第2の距離と前記第2の遠心加速度から前記回転軸の角速度を算定することを特徴とする検出器。
発明の詳細な説明
【技術分野】
【0001】
本発明は、主として、回転軸の回転を検出する検出器に関するものである。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
回転軸の回転を検出する技術として、磁石を含む回転系とホール素子を含む固定系とを備え、回転軸に回転系を固定し基準座標系に固定系を固定した状態において、回転系の磁石の磁力を、固定系のホール素子で検出することにより、回転軸の基準座標系に対する回転を検出する検出器が知られている(たとえば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2013-7671号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述した検出器を検出対象の回転軸が特定されない汎用の検出器として適用する場合、回転の検出を行う回転軸を変更する度に、検出器の回転系を回転軸に固定すると共に、検出器の固定系を基準座標系に固定する煩雑な作業が必要となる。また、周辺に検出器の固定系の基準座標系への固定に適した構造体が存在しない回転軸については、基準座標系に対する回転の検出に大きな困難を伴う。
【0005】
よって、固定系を基準座標系に固定することなく、回転系を回転軸に固定するだけで回転軸の基準座標系に対する回転を検出できれば、検出器の利便性は大きく向上する。
そこで、本発明は、基準座標系に固定することなく、基準座標系に対する回転を検出できる検出器を提供することを課題とする。
【課題を解決するための手段】
【0006】
前記課題達成のために、本発明は、回転軸に固定して使用される検出器に、前記回転軸に当該回転軸と共に回転するように固定されるベースと、前記ベースが前記回転軸に固定された状態において、前記回転軸の回転中心軸から見た回転軸の回転方向の角度差が180度となり、回転軸の回転中心軸からの回転軸の径方向の距離が等しくなるように前記ベースに固定された第1の加速度センサと第2の加速度センサと、前記ベースが前記回転軸に固定された状態において、前記回転中心軸から見た前記回転方向の角度差が180度となり、前記回転中心軸からの回転軸の径方向の距離が等しくなるように前記ベースに固定された第3の加速度センサと第4の加速度センサと、回転検出手段を備えたものである。
【0007】
ここで、前記ベースが前記回転軸に固定された状態における、前記第1の加速度センサ及び前記第2の加速度センサまでの前記回転中心軸からの回転軸の径方向の距離を第1の距離とし、前記第3の加速度センサ及び前記第4加速度センサまでの前記回転中心軸からの回転軸の径方向の距離を第2の距離として、前記第1の距離と前記第2の距離の差である距離差が所定の大きさとなるように、前記第1の加速度センサと前記第2の加速度センサと前記第3の加速度センサと前記第4の加速度センサは前記ベースに固定されている。また、前記ベースが前記回転軸に固定された状態において、前記第1の加速度センサと前記第2の加速度センサは、前記回転中心軸を中心とする円の周方向の、同じ周方向に対する正負が同じ加速度を検出し、前記第3の加速度センサと前記第4の加速度センサは、前記回転中心軸を中心とする円の周方向の、同じ周方向に対する正負が同じ加速度を検出する。
【0008】
そして、前記回転検出手段は、前記ベースが前記回転軸に固定された状態において、前記第1の加速度センサが検出した加速度を表す信号と第2の加速度センサが検出した加速度を表す信号とを加算した信号より、前記回転中心軸から前記径方向に前記第1の距離離れた位置の周方向加速度を第1の周方向加速度として算出し、前記第3の加速度センサが検出した加速度を表す信号と第4の加速度センサが検出した加速度を表す信号とを加算した信号より、前記回転中心軸から前記径方向に前記第2の距離離れた位置の周方向加速度を第2の周方向加速度として算出し、前記第1の周方向加速度と前記第2の周方向加速度の比が前記距離差によって生じているものとして、前記第1の距離と前記第2の距離の少なくとも一方を算定する。
【0009】
このような検出器は、前記第1の距離をR1、前記第2の距離をR2、前記距離差をΔRとして、R1=R2+ΔRとし、前記回転検出手段において、前記第1の周方向加速度をpf1、前記第2の周方向加速度をpf2として、R1=[ΔR/{(pf1/pf2)-1}]+ΔRによる前記第1の距離R1の算定と、R2=ΔR/{(pf1/pf2)-1}による前記第2の距離R2の算定とのうちの少なくとも一方の算定を行うよう構成してよい。
【0010】
また、検出器は、前記回転検出手段において、前記第1の距離を算定し、算定した第1の距離と前記第1の周方向加速度から前記回転軸の角加速度を算定するように構成してもよいし、前記第2の距離を算定し、算定した第2の距離と前記第2の周方向加速度から前記回転軸の角加速度を算定するように構成してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
粒子分析装置
3日前
個人
アクセサリー型テスター
4日前
エイブリック株式会社
電流検出回路
17日前
株式会社テイエルブイ
振動検出装置
3日前
東レ株式会社
シート状物の検査方法
18日前
株式会社ミツトヨ
画像測定機
5日前
栄進化学株式会社
浸透探傷用濃縮液
10日前
株式会社チノー
放射光測温装置
17日前
ダイハツ工業株式会社
試料セル
3日前
トヨタ自動車株式会社
電気自動車
4日前
日本特殊陶業株式会社
ガスセンサ
17日前
日本特殊陶業株式会社
ガスセンサ
17日前
株式会社 キョーワ
食品搬送装置
17日前
大和製衡株式会社
計量装置
10日前
日本碍子株式会社
ガスセンサ
17日前
大成建設株式会社
画像表示システム
13日前
理研計器株式会社
ガス検出器
5日前
理研計器株式会社
ガス検出器
5日前
株式会社熊谷組
計測システム
10日前
富士電機株式会社
エンコーダ
18日前
理研計器株式会社
ガス検出器
5日前
理研計器株式会社
ガス検出器
5日前
理研計器株式会社
ガス検出器
5日前
株式会社ニコン
検出装置
3日前
株式会社 システムスクエア
検査装置
11日前
TDK株式会社
温度センサ
18日前
東洋計器株式会社
超音波式流量計
10日前
株式会社デンソー
試験装置
13日前
東洋計器株式会社
超音波式流量計
10日前
東洋計器株式会社
超音波式流量計
10日前
オムロン株式会社
光電センサ
17日前
合同会社ステディステップス
側圧測定装置
3日前
トヨタ自動車株式会社
情報処理装置
3日前
トヨタ自動車株式会社
情報処理装置
3日前
トヨタ自動車株式会社
情報処理装置
3日前
東洋製罐株式会社
巻締寸法測定装置
12日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ