TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024134366
公報種別
公開特許公報(A)
公開日
2024-10-03
出願番号
2023044626
出願日
2023-03-20
発明の名称
運転支援装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人プロスペック特許事務所
主分類
G08G
1/16 20060101AFI20240926BHJP(信号)
要約
【課題】 ハンズオフ運転支援制御の実行中において報知制御を適切に実行する。
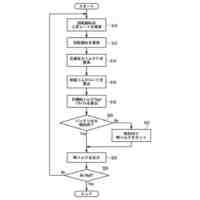
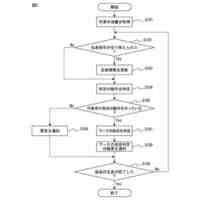
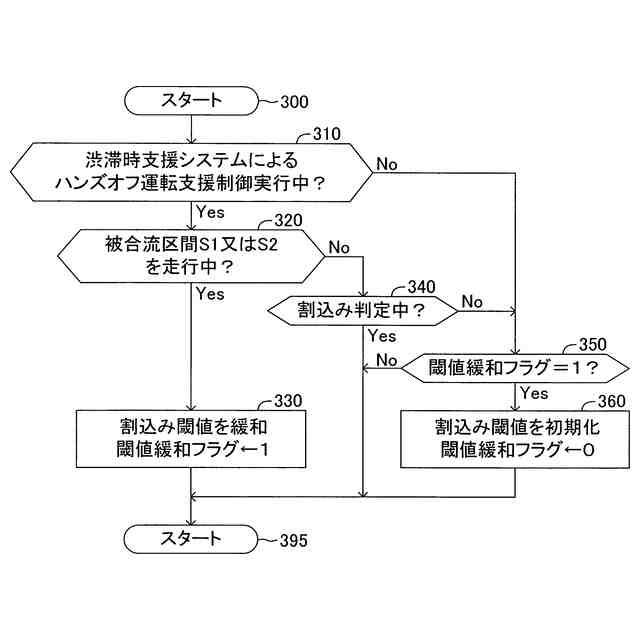
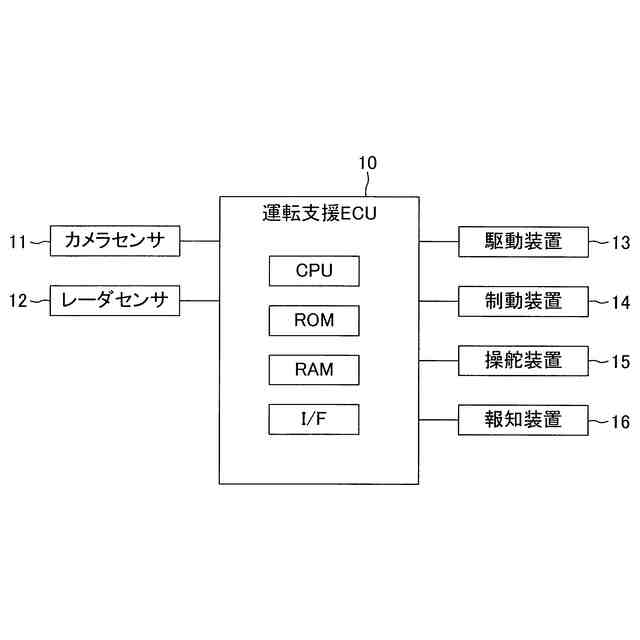
【解決手段】 運転支援装置は、自車両の前方に存在する他車両及び車線に関する情報を周囲情報として取得可能な周囲センサ11、12と、他車両についての割込み指標値を周囲情報に基づいて演算し、演算された割込み指標値を所定の割込み閾値と比較することにより他車両が割込み車両であると判定した場合に割込み車両の存在を自車両の運転者に報知する報知制御とハンズオフ運転支援制御とを実行可能な制御ユニット10を備える。制御ユニットは、ハンズオフ運転支援制御の実行中は周囲情報又は道路情報の少なくとも一方に基づいて自車両が被合流区間を走行しているか否かを判定し、自車両が被合流区間を走行している場合は被合流区間を走行していない場合と比較して他車両が割込み車両であると判定され易くなるように割込み閾値を変更する。
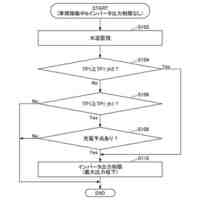
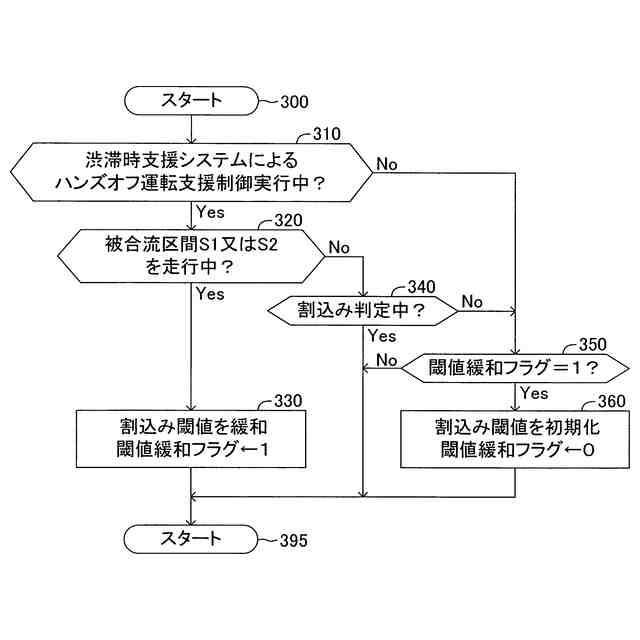
【選択図】 図3
特許請求の範囲
【請求項1】
自車両の前方に存在する他車両及び車線を検出し、前記検出された他車両及び車線に関する情報を周囲情報として取得可能な周囲センサと、
前記他車両が前記自車両の前方に割込む可能性を示す指標値である割込み指標値を前記周囲情報に基づいて演算し、前記演算された割込み指標値を所定の割込み閾値と比較することにより前記他車両が前記自車両の前方に割込む可能性が高い割込み車両であると判定した場合に前記割込み車両の存在を前記自車両の運転者に報知する報知制御と、所定の実行条件が成立した場合にハンズオフを許容しながら運転支援を行うハンズオフ運転支援制御と、を実行可能な制御ユニットと、
を備え、
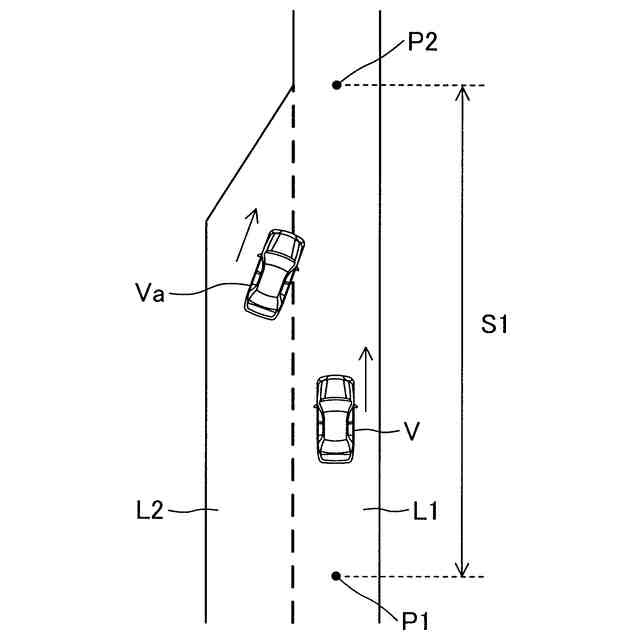
前記自車両が走行する自車線とは異なる車線が前記自車線に合流している合流領域を含む前記自車線上の所定の区間を被合流区間と規定すると、
前記制御ユニットは、
前記ハンズオフ運転支援制御の実行中は、前記周囲情報、又は、ナビゲーションシステムにより取得される前記自車両の前方の道路形状を含む道路情報の少なくとも一方に基づいて前記自車両が前記被合流区間を走行しているか否かを判定し、
前記自車両が前記被合流区間を走行している場合は前記被合流区間を走行していない場合と比較して前記他車両が前記割込み車両であると判定され易くなるように前記割込み閾値を変更する、
ように構成された、
運転支援装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、割込み車両の存在を自車両の運転者に報知する報知制御及びハンズオフを許容しながら運転支援を行うハンズオフ運転支援制御を実行可能な運転支援装置に関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
従来から、運転支援制御の実行中に他車両(典型的には、隣接車線を走行する他車両)が自車両の前方に割込む可能性が高いと判定された場合に、当該他車両は割込み車両であるとして運転者にその存在を報知する報知制御を実行可能な運転支援装置が知られている。報知制御が実行されると、運転者は自ら運転操作を行う(典型的には、ブレーキ操作を行う)ことにより割込み車両との接触又は過度な接近を回避しようとする。なお、割込み車両への対処としては、例えば、特許文献1には、自車両の前方に他車両が割込む可能性が高いと判定された場合に所定のブレーキ力を発生させるように制動装置を制御する運転支援装置が開示されている。この運転支援装置は、「上記判定時点における運転者によるブレーキペダル操作に応じたブレーキ力」に、「割込みに対処するために必要な割込み対処ブレーキ力」を加算したブレーキ力を上記所定のブレーキ力として発生させるように構成されている。
【先行技術文献】
【特許文献】
【0003】
特開2021-054293号公報
【発明の概要】
【0004】
ところで、近年、ハンズオフ運転支援制御を実行可能な技術の研究開発が進められている。ここで、ハンズオフとは、運転者が操舵ハンドルを把持していないことを意味する。ハンズオフ運転支援制御の実行中に報知制御が実行されると、運転者は、まず操舵ハンドルを把持してから運転操作を開始する。このため、「ハンズオフ運転支援制御の実行中に報知制御が実行される場合」は、「運転者が操舵ハンドルを把持することが要求される従来の運転支援制御の実行中に報知制御が実行される場合」と比較して、「操舵ハンドルを把持する」という動作が余分に必要となる。従って、ハンズオフ運転支援制御の実行中においては、従来の運転支援制御よりも早めに報知制御が実行されることが望ましい。
【0005】
そこで、係る運転支援装置は、例えば、ハンズオフ運転支援制御の実行中における割込み閾値(他車両が割込み車両であるか否かを判定するための閾値)を、従来の運転支援制御の実行中における割込み閾値と比較して、他車両が割込み車両であると判定され易くなるように変更するように構成され得る(以下、割込み閾値をこのように変更することを、単に「割込み閾値を緩和する」とも称する。)。これにより、ハンズオフ運転支援制御の実行中においては他車両が割込み車両であると判定され易くなるため、報知制御が実行されるタイミングを早めることができる。
【0006】
ここで、他車両が割込み車両であるか否かの判定(以下、「割込み判定」と称する。)は、典型的には、カメラセンサ及びレーダセンサ等から取得される他車両の相対位置及び相対速度を含む情報に基づいて行われる。このため、上述した構成(ハンズオフ運転支援制御中は一律に割込み閾値を緩和する構成)では、これらのセンサの検出精度に起因して、実際には割込み車両には該当しない他車両まで割込み車両であると誤判定されて不要な報知制御が実行される事態が頻発する。従って、上記情報に基づいて割込み判定を行う構成では、ハンズオフ運転支援制御の実行中における報知制御の実行タイミングを早めることと、報知制御の不要作動の発生頻度を低減することと、を両立させることが難しい。
【0007】
本発明は、上述した問題に対処するためになされたものである。即ち、本発明の目的の一つは、ハンズオフ運転支援制御の実行中において報知制御を適切に実行することが可能な運転支援装置を提供することにある。
【0008】
本発明による運転支援装置(以下、「本発明装置」と称する。)は、
自車両の前方に存在する他車両及び車線を検出し、前記検出された他車両及び車線に関する情報を周囲情報として取得可能な周囲センサと、
前記他車両が前記自車両の前方に割込む可能性を示す指標値である割込み指標値を前記周囲情報に基づいて演算し、前記演算された割込み指標値を所定の割込み閾値と比較することにより前記他車両が前記自車両の前方に割込む可能性が高い割込み車両であると判定した場合に前記割込み車両の存在を前記自車両の運転者に報知する報知制御と、所定の実行条件が成立した場合にハンズオフを許容しながら運転支援を行うハンズオフ運転支援制御と、を実行可能な制御ユニットと、を備える。
前記自車両が走行する自車線とは異なる車線が前記自車線に合流している合流領域を含む前記自車線上の所定の区間を被合流区間と規定すると、
前記制御ユニットは、
前記ハンズオフ運転支援制御の実行中は、前記周囲情報、又は、ナビゲーションシステムにより取得される前記自車両の前方の道路形状を含む道路情報の少なくとも一方に基づいて前記自車両が前記被合流区間を走行しているか否かを判定し、
前記自車両が前記被合流区間を走行している場合は前記被合流区間を走行していない場合と比較して前記他車両が前記割込み車両であると判定され易くなるように前記割込み閾値を変更する、ように構成されている。
【0009】
本発明装置では、ハンズオフ運転支援制御の実行中は、周囲情報又は道路情報の少なくとも一方に基づいて自車両が被合流区間を走行しているか否かが判定され、自車両が被合流区間を走行している場合は被合流区間を走行していない場合と比較して他車両が割込み車両であると判定され易くなるように割込み閾値を変更する(別言すれば、割込み閾値を緩和する)ように構成されている。一般に、被合流区間では、自車線とは異なる車線(例えば、隣接車線)を走行する他車両が自車線に車線変更する頻度が高いため、自車両の前方への割込みが発生する可能性が高くなる。つまり、本発明装置は、ハンズオフ運転支援制御の実行中においては、割込みが発生する可能性が高い区間を自車両が走行している期間のみ割込み閾値を緩和するように構成されている。この構成によれば、ハンズオフ運転支援制御の実行中において被合流区間を走行しているときの報知制御の実行タイミングを早めることができる。また、被合流区間においてはそもそも割込みが発生する可能性が高いため、割込み閾値の緩和に起因する誤判定(即ち、報知制御の不要作動)の発生頻度を低減できる。一方、ハンズオフ運転支援制御の実行中において被合流区間以外の区間を走行しているときは割込み閾値が変更されないため誤判定は発生し難い。従って、本発明装置によれば、ハンズオフ運転支援制御の実行中において報知制御を適切に実行できる。
【0010】
上記説明においては、発明の理解を助けるために、実施形態に対応する発明の構成要件に対して、実施形態で用いた符号を括弧書きで添えているが、発明の各構成要件は、前記符号によって規定される実施形態に限定されるものではない。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
電池
12日前
トヨタ自動車株式会社
電池
20日前
トヨタ自動車株式会社
車両
26日前
トヨタ自動車株式会社
車両
14日前
トヨタ自動車株式会社
組電池
26日前
トヨタ自動車株式会社
電極体
12日前
トヨタ自動車株式会社
組立体
22日前
トヨタ自動車株式会社
移動体
14日前
トヨタ自動車株式会社
端末装置
5日前
トヨタ自動車株式会社
締結工具
20日前
トヨタ自動車株式会社
燃料電池
22日前
トヨタ自動車株式会社
二次電池
22日前
トヨタ自動車株式会社
検査装置
12日前
トヨタ自動車株式会社
移動装置
22日前
トヨタ自動車株式会社
充電装置
21日前
トヨタ自動車株式会社
二次電池
22日前
トヨタ自動車株式会社
駆動装置
6日前
トヨタ自動車株式会社
回転電機
12日前
トヨタ自動車株式会社
端末装置
20日前
トヨタ自動車株式会社
制御装置
21日前
トヨタ自動車株式会社
制御装置
6日前
トヨタ自動車株式会社
電源装置
26日前
トヨタ自動車株式会社
スペーサ
26日前
トヨタ自動車株式会社
伸縮装置
21日前
トヨタ自動車株式会社
管理装置
5日前
トヨタ自動車株式会社
プログラム
12日前
トヨタ自動車株式会社
電池パック
21日前
トヨタ自動車株式会社
電池パック
21日前
トヨタ自動車株式会社
燃料系配管
20日前
トヨタ自動車株式会社
電気自動車
12日前
トヨタ自動車株式会社
自動運転車両
今日
トヨタ自動車株式会社
電池システム
22日前
トヨタ自動車株式会社
作業監視方法
14日前
トヨタ自動車株式会社
照度推定装置
13日前
トヨタ自動車株式会社
電圧監視装置
13日前
トヨタ自動車株式会社
電源システム
13日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ