TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024123745
公報種別
公開特許公報(A)
公開日
2024-09-12
出願番号
2023031387
出願日
2023-03-01
発明の名称
動力伝達機構、関節機構及び多関節ロボット
出願人
オムロン株式会社
代理人
弁理士法人太陽国際特許事務所
主分類
F16H
7/04 20060101AFI20240905BHJP(機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段)
要約
【課題】ワイヤを用いる動力伝達機構において、適用される装置の大型化を抑制する。
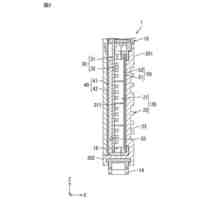
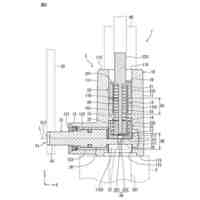
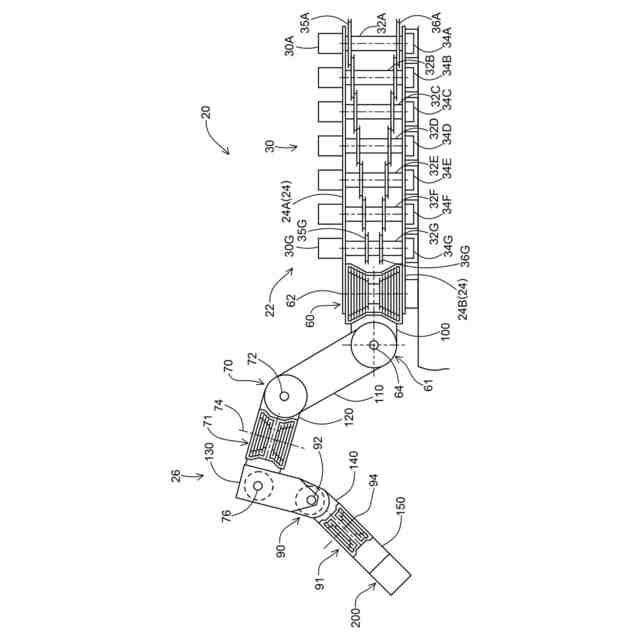
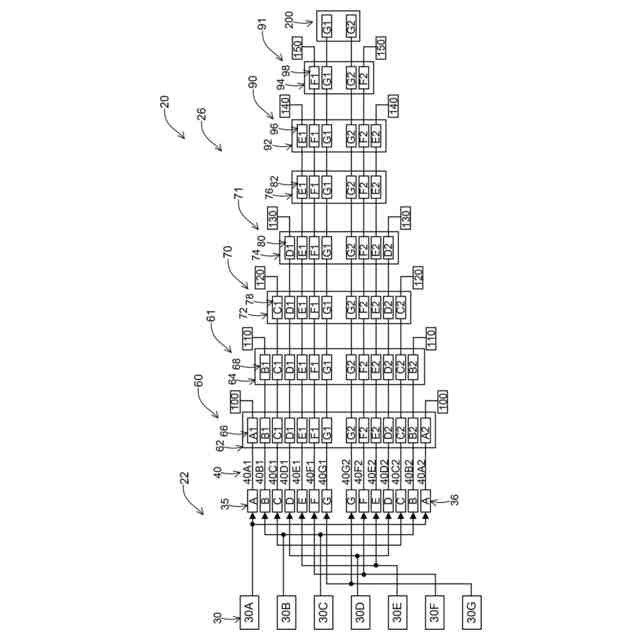
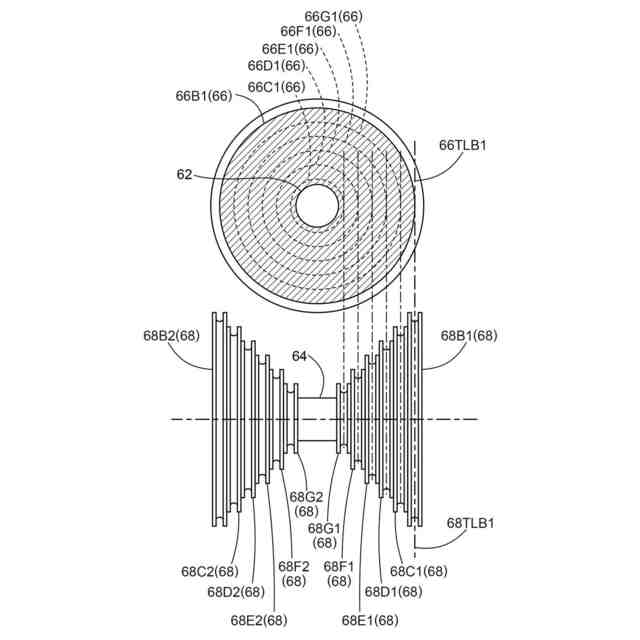
【解決手段】動力伝達機構は、ベース部に配置された複数の駆動源と、複数の前記駆動源のそれぞれに一端を固定されたワイヤと、前記駆動源側に配置される第一関節の回転軸である第一軸と、前記第一関節に接続される第二関節の回転軸であって前記第一軸と直角かつねじれの位置に配置される第二軸と、前記第一軸上に前記第一軸の軸方向一方側に向かって径が小さくなるように配置される複数の第一軸プーリと、前記第二軸上に前記第二軸の軸方向一方側に向かって径が小さくなるように配置される複数の第二軸プーリと、を有し、複数の前記第一軸プーリの接線が複数の前記第二軸プーリの接線と一致しており、複数の前記ワイヤのそれぞれは、前記第一軸プーリから前記接線に沿うように前記第二軸プーリに掛けられている。
【選択図】図2
特許請求の範囲
【請求項1】
ベース部に配置された複数の駆動源と、
複数の前記駆動源のそれぞれに一端を固定されたワイヤと、
前記駆動源側に配置される第一関節の回転軸である第一軸と、
前記第一関節に接続される第二関節の回転軸であって前記第一軸と直角かつねじれの位置に配置される第二軸と、
前記第一軸上に前記第一軸の軸方向一方側に向かって径が小さくなるように配置される複数の第一軸プーリと、
前記第二軸上に前記第二軸の軸方向一方側に向かって径が小さくなるように配置される複数の第二軸プーリと、
を有し、
複数の前記第一軸プーリの接線が複数の前記第二軸プーリの接線と一致しており、
複数の前記ワイヤのそれぞれは、前記第一軸プーリから前記接線に沿うように前記第二軸プーリに掛けられている、動力伝達機構。
続きを表示(約 1,700 文字)
【請求項2】
複数の前記第一軸プーリは、前記第一軸の軸方向両端から前記一方側である軸方向中央側に向かって径が小さくなるように配置され、
複数の前記第二軸プーリは、前記第二軸の軸方向両端から前記一方側である軸方向中央側に向かって径が小さくなるように配置される、
請求項1に記載の動力伝達機構。
【請求項3】
前記第一軸の軸方向最外側に位置する前記第一軸プーリに掛けられた前記ワイヤの他端は、前記第一軸が固定されている第一固定部材に固定されている、請求項1に記載の動力伝達機構。
【請求項4】
前記第二軸の軸方向最外側に位置する前記第二軸プーリに掛けられた前記ワイヤの他端は、前記第二軸が固定されている第二固定部材に固定されている、請求項1に記載の動力伝達機構。
【請求項5】
前記第一軸の軸方向の中心から対の位置にある前記第一軸プーリに掛かる前記ワイヤは対であり、対の前記ワイヤは対の位置にある前記第一軸プーリに互いに逆向きに掛けまわされている、請求項2に記載の動力伝達機構。
【請求項6】
前記ワイヤは、前記第一軸プーリ及び前記第二軸プーリの少なくとも一方に1回転以上掛けまわされている、請求項1に記載の動力伝達機構。
【請求項7】
前記第一軸プーリの径方向外側に配置され、当接により前記第一軸プーリに掛けられた前記ワイヤの脱輪を抑制する第一抑制部と、
前記第二軸プーリの径方向外側に配置され、当接により前記第二軸プーリに掛けられた前記ワイヤの脱輪を抑制する第二抑制部と、
を更に有する、請求項1に記載の動力伝達機構。
【請求項8】
前記駆動源と前記第一軸プーリとの間で前記接線上に配置され、前記ワイヤの送り出し及び巻き取りをガイドする第一ガイド部と、
前記第一軸プーリと前記第二軸プーリとの間で前記接線上に配置され、前記ワイヤの送り出し及び巻き取りをガイドする第二ガイド部と、
を更に有する、請求項1に記載の動力伝達機構。
【請求項9】
前記駆動源はモータであり、前記モータの軸に接続されるモータ軸プーリに前記ワイヤの一端が固定され、前記モータの回転により前記ワイヤが前記モータ軸プーリに巻き取られる、請求項1に記載の動力伝達機構。
【請求項10】
ベース部に配置された複数の駆動源と、
複数の前記駆動源のそれぞれに一端を固定されたワイヤと、
前記駆動源側に配置される第一関節の回転軸である第一軸と、
前記第一関節に接続される第二関節の回転軸であって前記第一軸と直角かつねじれの位置に配置される第二軸と、
前記第一軸上に前記第一軸の軸方向に配置される複数の第一軸プーリと、
前記第二軸上に前記第二軸の軸方向に配置される複数の第二軸プーリと、
を有し、
複数の前記第一軸プーリは、前記第一軸の軸方向両端から軸方向中央側に向かって径が小さくなるように配置され、
複数の前記第二軸プーリは、前記第二軸の軸方向両端から軸方向中央側に向かって径が小さくなるように配置され、
複数の前記第一軸プーリの接線が複数の前記第二軸プーリの接線と一致しており、
複数の前記ワイヤのそれぞれは、前記第一軸プーリから前記接線に沿うように前記第二軸プーリに掛けられており、
前記第一軸の軸方向の中心から対の位置にある前記第一軸プーリに掛かる前記ワイヤは対であり、対の前記ワイヤは対の位置にある前記第一軸プーリに互いに逆向きに掛けまわされ、
前記第一軸の軸方向最外側に位置する前記第一軸プーリに掛けられた前記ワイヤの他端は、前記第一軸が固定されている第一固定部材に固定され、
前記第一軸の前記軸方向最外側の他方に位置する前記第一軸プーリに掛けられた前記対となるワイヤの他端は、前記第一軸が固定されている第一固定部材に固定されている、
関節機構。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、動力伝達機構、関節機構及び多関節ロボットに関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
ワイヤを用いた動力伝達機構が従来から知られている(例えば、特許文献1参照)。
【0003】
またワイヤ駆動方式の多関節ロボットが従来から知られている(例えば特許文献2及び非特許文献1)。
【先行技術文献】
【特許文献】
【0004】
特開2000-108072号公報
米国特許第4903536号明細書
【非特許文献】
【0005】
Endo, G, Horigome, A., & Takata, A. (2019). Super dragon: A 10-m-long-coupled tendon-driven articulated manipulator. IEEE Robotics and Automation Letters, 4(2), 934-941.
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、ワイヤを用いて動力を伝達する機構では、ワイヤ毎に複数のプーリをそれぞれ異なる位置に配置している。このように複数のプーリをそれぞれ異なる位置に配置する場合、ワイヤによる動力伝達機構を用いた装置が大型化する傾向がある。
【0007】
本開示は、ワイヤを用いる動力伝達機構において、適用される装置の大型化を抑制することを目的とする。
【課題を解決するための手段】
【0008】
本開示の一態様は、ベース部に配置された複数の駆動源と、複数の前記駆動源のそれぞれに一端を固定されたワイヤと、前記駆動源側に配置される第一関節の回転軸である第一軸と、前記第一関節に接続される第二関節の回転軸であって前記第一軸と直角かつねじれの位置に配置される第二軸と、前記第一軸上に前記第一軸の軸方向一方側に向かって径が小さくなるように配置される複数の第一軸プーリと、前記第二軸上に前記第二軸の軸方向一方側に向かって径が小さくなるように配置される複数の第二軸プーリと、を有し、複数の前記第一軸プーリの接線が複数の前記第二軸プーリの接線と一致しており、複数の前記ワイヤのそれぞれは、前記第一軸プーリから前記接線に沿うように前記第二軸プーリに掛けられている、動力伝達機構である。
【0009】
本開示の他の態様は、ベース部に配置された複数の駆動源と、複数の前記駆動源のそれぞれに一端を固定されたワイヤと、前記駆動源側に配置される第一関節の回転軸である第一軸と、前記第一関節に接続される第二関節の回転軸であって前記第一軸と直角かつねじれの位置に配置される第二軸と、前記第一軸上に前記第一軸の軸方向に配置される複数の第一軸プーリと、前記第二軸上に前記第二軸の軸方向に配置される複数の第二軸プーリと、を有し、複数の前記第一軸プーリは、前記第一軸の軸方向両端から軸方向中央側に向かって径が小さくなるように配置され、複数の前記第二軸プーリは、前記第二軸の軸方向両端から軸方向中央側に向かって径が小さくなるように配置され、複数の前記第一軸プーリの接線が複数の前記第二軸プーリの接線と一致しており、複数の前記ワイヤのそれぞれは、前記第一軸プーリから前記接線に沿うように前記第二軸プーリに掛けられており、前記第一軸の軸方向の中心から対の位置にある前記第一軸プーリに掛かる前記ワイヤは対であり、対の前記ワイヤは対の位置にある前記第一軸プーリに互いに逆向きに掛けまわされ、前記第一軸の軸方向最外側に位置する前記第一軸プーリに掛けられた前記ワイヤの他端は、前記第一軸が固定されている第一固定部材に固定され、前記第一軸の前記軸方向最外側の他方に位置する前記第一軸プーリに掛けられた前記対となるワイヤの他端は、前記第一軸が固定されている第一固定部材に固定されている、関節機構である。
【0010】
本開示のさらに他の態様は、ベース部と、前記ベース部に配置された複数の駆動源と、複数の前記駆動源のそれぞれに一端を固定されたワイヤと、複数の前記ワイヤを通過させる複数の関節と、を有する多関節ロボットであって、前記多関節ロボットは、複数の前記関節として、前記駆動源側に配置される第一関節の回転軸である第一軸と、前記第一関節に接続される第二関節の回転軸であって前記第一軸と直角かつねじれの位置に配置される第二軸と、前記第一軸上に前記第一軸の軸方向に配置される複数の第一軸プーリと、前記第二軸上に前記第二軸の軸方向に配置される複数の第二軸プーリと、を有しており、複数の前記第一軸プーリは、前記第一軸の軸方向両端から軸方向中央側に向かって径が小さくなるように配置され、複数の前記第二軸プーリは、前記第二軸の軸方向両端から軸方向中央側に向かって径が小さくなるように配置され、複数の前記第一軸プーリの接線が複数の前記第二軸プーリの接線と一致しており、複数の前記ワイヤのそれぞれは、前記第一軸プーリから前記接線に沿うように前記第二軸プーリに掛けられており、前記第一軸の軸方向の中心から対の位置にある前記第一軸プーリに掛かる前記ワイヤは対であり、対の前記ワイヤは対の位置にある前記第一軸プーリに互いに逆向きに掛けまわされ、前記第一軸の軸方向最外側に位置する前記第一軸プーリに掛けられた前記ワイヤの他端は、前記第一軸が固定されている第一固定部材に固定され、前記第一軸の前記軸方向最外側の他方に位置する前記第一軸プーリに掛けられた前記対となるワイヤの他端は、前記第一軸が固定されている第一固定部材に固定されている、多関節ロボットである。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オムロン株式会社
継電器
1日前
オムロン株式会社
入力装置
10日前
オムロン株式会社
コネクタ
9日前
オムロン株式会社
操作装置
15日前
オムロン株式会社
電磁継電器
9日前
オムロン株式会社
電磁継電器
9日前
オムロン株式会社
電磁継電器
9日前
オムロン株式会社
電力変換装置
22日前
オムロン株式会社
認証中継サーバ
22日前
オムロン株式会社
リミットスイッチ
1日前
オムロン株式会社
制御装置およびプログラム
1日前
オムロン株式会社
制御装置およびプログラム
1日前
オムロン株式会社
券売システム、および券売方法
1日前
オムロン株式会社
導光板、および導光板ユニット
9日前
オムロン株式会社
導光板ユニット、および遊技機
15日前
オムロン株式会社
ポール、及び、充放電システム
1か月前
オムロン株式会社
支援装置、支援方法及び支援プログラム
9日前
オムロン株式会社
制御装置、方法、プログラム、及び制御システム
25日前
オムロン株式会社
情報処理システム、情報処理方法およびプログラム
9日前
オムロン株式会社
情報処理システム、情報処理方法およびプログラム
9日前
オムロン株式会社
情報処理システム、情報処理方法およびプログラム
9日前
オムロン株式会社
情報処理システム、情報処理方法およびプログラム
9日前
オムロン株式会社
経路計画装置、方法、プログラム、及び移動制御システム
9日前
オムロン株式会社
点検支援システム、点検支援方法、及び点検支援プログラム
15日前
オムロン株式会社
商品販売システム、商品販売方法、及び商品販売プログラム
15日前
オムロン株式会社
商品販売システム、商品販売方法、及び商品販売プログラム
15日前
オムロン株式会社
点検支援システム、点検支援方法、及び点検支援プログラム
15日前
オムロン株式会社
電磁継電器
1日前
オムロン株式会社
聴診装置およびこれを備えた聴診システム、聴診方法、聴診プログラム
29日前
オムロン株式会社
転落検知装置、転落検知システム、転落検知方法および転落検知プログラム
25日前
オムロン株式会社
旅客流動情報生成装置、旅客流動情報生成方法、および、旅客流動情報生成プログラム
24日前
オムロン株式会社
旅客流動情報生成装置、旅客流動情報生成方法、および、旅客流動情報生成プログラム
24日前
オムロン株式会社
データ収集方法、データ収集用移動装置、学習済みモデル、学習済みモデルの製造方法、自律型移動装置、学習用データの製造方法
22日前
個人
回転機構
5か月前
個人
保持機
9日前
個人
回転伝達機構
3か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ