TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024121906
公報種別
公開特許公報(A)
公開日
2024-09-09
出願番号
2023029137
出願日
2023-02-28
発明の名称
移動体制御システム
出願人
株式会社日立製作所
,
国立大学法人大阪大学
代理人
弁理士法人平木国際特許事務所
主分類
G05D
1/43 20240101AFI20240902BHJP(制御;調整)
要約
【課題】フィールドを共有する各移動体をそれぞれの目的地まで移動させる制御を安全性保証と低コストを両立して実現する。
【解決手段】移動体制御システムは、目的地までの移動を制御する目的地移動用制御入力決定部と目的地移動用制御入力決定部に入力値を修正する制御入力修正部とデッドロックを検知するデッドロック検知部と自己駆動させる駆動部と、を有する移動体を複数備えた移動体制御システムであって、移動体の制御入力修正部はデッドロック検知部がデッドロックを検知した場合に回避移動が必要と判断して、制御入力修正部から回避移動の指示を受けた場合に自己位置情報と障害物位置情報と他者ロボット位置情報と他者ロボットロック位置情報とに基づき回避軌道を生成し、出力部は自己の現在位置を示す自己ロボット位置情報と生成した回避軌道上にあって移動体が未通過の位置を自己ロボットロック位置情報として他の移動体に出力する。
【選択図】図4
特許請求の範囲
【請求項1】
目的地までの移動を制御する目的地移動用制御入力決定部と前記目的地移動用制御入力決定部に入力された値を修正する制御入力修正部とデッドロックを検知するデッドロック検知部と自己を駆動させる駆動部と、を有する移動体を複数備えた移動体制御システムであって、
前記移動体の各々は回避移動用有限状態遷移モデル動的生成部と出力部とを有し、
前記移動体の前記制御入力修正部は前記デッドロック検知部がデッドロックを検知した場合に回避移動が必要と判断して前記回避移動用有限状態遷移モデル動的生成部に指示し、
前記回避移動用有限状態遷移モデル動的生成部は前記制御入力修正部から回避移動の指示を受けた場合に自己位置情報と障害物位置情報と他者ロボット位置情報と他者ロボットロック位置情報とに基づき回避移動用有限状態遷移モデルを動的に生成して回避軌道を生成し、
前記出力部は自己の現在位置を示す自己ロボット位置情報と前記生成した回避軌道上にあって前記移動体が未通過の位置を自己ロボットロック位置情報として他の移動体に出力する、
ことを特徴とする移動体制御システム。
続きを表示(約 2,100 文字)
【請求項2】
請求項1に記載の移動体制御システムであって、
前記制御入力修正部は、他者ロボットと衝突する可能性を検知した場合において、前記目的地移動用制御入力決定部が決定した制御入力に関わらず、該制御入力修正部が搭載された移動体を停止させるよう前記駆動部に指示する、
ことを特徴とする移動体制御システム。
【請求項3】
請求項2に記載の移動体制御システムであって、
前記制御入力修正部は、他者ロボット位置情報および他者ロボットロック位置情報に含まれる位置に自己移動体が進入しようとした場合に該移動体を停止させ、
前記デッドロック検知部は前記移動体の停止が一定回数以上連続して発生した場合にデッドロックを検知する、
ことを特徴とする移動体制御システム。
【請求項4】
請求項3に記載の移動体制御システムであって、
前記制御入力修正部は、他者ロボット位置情報または他者ロボットロック位置情報の少なくとも1つの受信に失敗した場合において、前記目的地移動用制御入力決定部が決定した制御入力に関わらず、当該制御入力修正部が搭載された移動体を停止させるよう前記駆動部に指示する、
ことを特徴とする移動体制御システム。
【請求項5】
請求項4に記載の移動体制御システムであって、
前記他者ロボット位置情報または他者ロボットロック位置情報の受信を失敗したことに起因する前記制御入力修正部による停止指示の上書きは、前記デッドロック検知部によるデッドロック検知判定のための停止の連続回数カウントに含まない、
ことを特徴とする移動体制御システム。
【請求項6】
請求項5に記載の移動体制御システムであって、
前記制御入力修正部は、受信した他者ロボット位置情報および他者ロボットロック位置情報と、当該制御入力修正部が搭載された移動体に含まれる前記回避移動用有限状態遷移モデル動的生成部が生成し他者ロボットに送信した自己ロック位置と、を比較し、前記受信した位置情報と前記自己ロック位置が重複していなければ前記回避移動用有限状態遷移モデル動的生成部が生成した前記回避移動用有限状態遷移モデルに従い制御入力を決定して前記駆動部に当該制御入力を印加し、前記受信した位置情報と前記自己ロック位置が重複していれば前記回避移動用有限状態遷移モデルを破棄して前記駆動部に停止命令を印加するとともに前記回避移動用有限状態遷移モデル動的生成部に対して回避移動用有限状態遷移モデルを再生成するよう指示する、
ことを特徴とする移動体制御システム。
【請求項7】
請求項6に記載の移動体制御システムであって、
前記目的地移動用制御入力決定部および前記制御入力修正部はそれぞれハイレベル制御器を有し、
前記移動体の各々はローレベル制御器を有し、
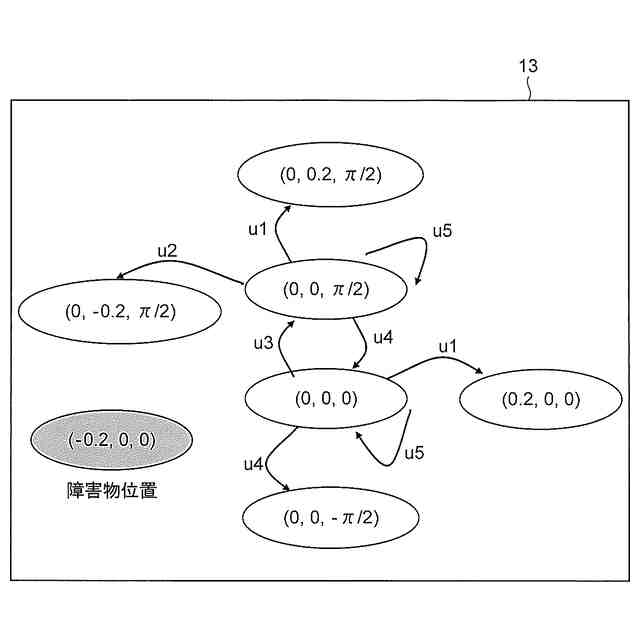
前記ハイレベル制御器は前記移動体の状態空間を有限の状態数に分割した抽象化状態空間を構成し前記抽象化状態空間における各状態において各制御入力を印加した場合にどの状態に遷移するかに基づき有限状態遷移モデルを生成し当該生成した有限状態遷移モデル上で目的地までの移動経路を計画し当該計画に基づき制御入力を並進または回転のいずれかにするかを決定し、
前記ローレベル制御器は前記ハイレベル制御器の指示に従い前記各移動体が並進または回転を行うように前記駆動部に含まれるモータまたはエンジンまたはその他移動体を移動させる駆動力を発生する装置を制御する、
ことを特徴とする移動体制御システム。
【請求項8】
請求項7に記載の移動体制御システムであって、
前記回避移動用有限状態遷移モデル動的生成部が生成する回避移動用有限状態遷移モデルは前記ハイレベル制御器における前記有限状態遷移モデルの構成において他者の移動体から受信したロック位置への状態遷移を禁止することによって得られる、
ことを特徴とする移動体制御システム。
【請求項9】
請求項8に記載の移動体制御システムであって、
前記移動体の各々に含まれる前記ハイレベル制御器は同一の方法により抽象化状態空間を構成し、
前記各移動体が送信および受信する前記他者ロボット位置情報、前記自己ロボット位置情報、前記他者ロボットロック位置情報及び前記自己ロボットロック位置情報は前記抽象化状態空間上における位置の情報として記述される、
ことを特徴とする移動体制御システム。
【請求項10】
請求項9に記載の移動体制御システムであって、
前記移動体の各々は制御マイコンを有し、
前記ハイレベル制御器は該制御マイコン上に実装され、
前記制御マイコンは、前記有限状態遷移モデルの実装に必要となるサイズ以上のメモリ領域を有する、
ことを特徴とする移動体制御システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、複数の移動体を制御する移動体制御システムに関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
人手不足等を背景に、物流倉庫や建設現場や空港や道路等において地上または空中を自律的に移動するロボットや車両やUAV(Unmanned Aerial Vehicle)の開発が期待されている。これらにおいては、同一のフィールドに複数の移動体が存在するため、障害物や他の移動体に衝突させることなく安全に各移動体を所定の目的地まで移動させることが求められる。
【0003】
この分野に関連する技術として、特許文献1に記載の技術がある。この公報においては、複数のロボットの存在を考慮しつつも、計画計算に必要な計算時間や計算機の記憶容量を低減可能な、ロボット協調搬送計画技術を提供することを課題としている。そしてその解決手段として、マルコフ状態空間を階層的に構成し(物品軌道計算処理を第1階層、切り替え位置決定処理を第2階層、移動経路計画処理を第3階層とする)、動作計画の探索を変化頻度の低い階層(第1階層)から行い、そして、変化頻度の低い階層での探索計算の結果を使用して、変化頻度の高い階層における探索の範囲を限定し、限られた状態空間において変化頻度の高い下位の階層(第2階層、第3階層)における探索を行うことが記載されている。
【0004】
また、特許文献2によれば、対象物とロボットの一方または両方の内部状態を推定し、この内部状態に基づいて、ロボットの制御に必要な予測値(制御指令値)を生成する場合に、内部状態の更新処理にかかる時間の影響を受けることなく、決められた制御周期で制御指令値を生成できる運動予測制御装置と方法を提供することを目的としている。そして当該目的の達成のため、対象物とロボットの一方または両方を計測することによりセンサ情報を取得する計測装置と、センサ情報に基づいて、対象物とロボットの一方または両方の内部状態を予測して更新する状態推定装置と、前記内部状態を記憶するデータ記憶装置と、前記ロボットを制御するロボット制御装置と、を備え、状態推定装置は、ロボットの制御周期に依らない任意のタイミングで、前記内部状態を更新し、ロボット制御装置は、前記制御周期で、データ記憶装置に記憶された最新の内部状態に基づいて、ロボットの制御に必要な予測値を算出する、ことを特徴とする運動予測制御装置を提供している。
【先行技術文献】
【特許文献】
【0005】
特開2012-227349号公報
国際公開2012/153629号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1によれば、複数のロボットのとりうる状態を直接考慮すると状態数が膨大となるところ、状態空間を有限に分割したマルコフ遷移モデルを作成し当該遷移モデル上で軌道または行動計画を探索することにより、計画計算に必要な計算時間や計算機の記憶容量を低減することを可能としている。しかしながら、本公知例はロボットの協調動作を想定してなされたものであり、各ロボットの行動計画をあらかじめ立案する必要があることから、例えば動作中に一部の通信パケットの遅延または途絶等の行動計画と相違する状況が発生した場合、いったん全てのロボットを停止させ、再度行動計画を立てる必要がある。これは、全体システムの稼働率を低下させる。特に、物流倉庫や建設現場や空港や道路等において自律的に移動するロボットや車両に関しては、必ずしもすべてのロボットまたは車両が互いに協調して作業を行っているわけではなく、また、構成するロボットまたは車両の数が増大し通信量が増加するほど1つ以上のパケットの遅延や途絶は高い頻度で容易に発生しうる。したがって、全体システムの稼働率が深刻に低下することから適用できない。
【0007】
一方、特許文献2によれば、ロボットの外部からのセンシング情報や他のロボットからの情報を受信する前にカルマンフィルタ等の技術を用いてそれらの情報を予測し、受信した情報を観測結果として予測に反映させる手法が提示されている。これにより、通信途絶などのような当初の計画と相違するような状況が発生しても、予測を修正することにより制御を継続させることが可能である、しかしながら、このような予測制御の計算は複雑であり、一定の制御周期の間に常に正しい計算結果が得られているかを確認するためにはあらゆる条件で検証テストを実施する必要がありコストが高い。また、当初の計画と相違する状況の発生に伴う予測の修正が各ロボットまたは全体システムに対してどのような影響を与えるかは自明ではない。特に、複数のロボットを同時に考慮する必要がある場合においては、検証テストすべき状態の組み合わせは膨大となりそのすべてを検証することは不可能である。
【0008】
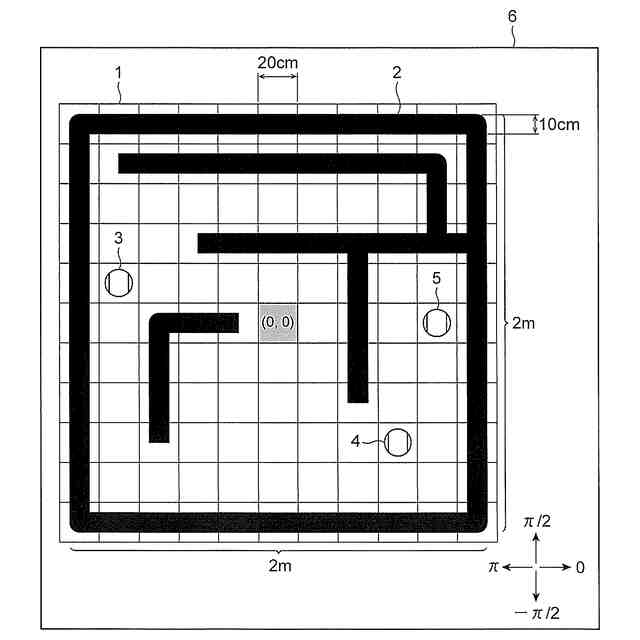
上記を踏まえ、本発明は、フィールドを共有する各移動体にそれぞれ与えられたミッション(例えば目的地移動やサーベイランス)を安全性保証と低コストを両立して実現することを目的とし、通信パケットの予期せぬ途絶が発生する場合や、フィールドの障害物位置や移動体数が当初の想定と異なる(変化した)場合においても、安全性保証と低コストの両立を保つことが課題である。
【課題を解決するための手段】
【0009】
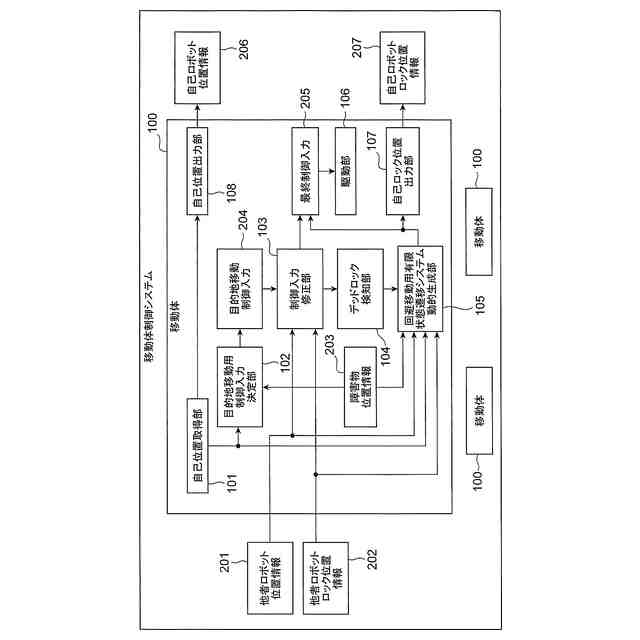
上記課題を解決するために、本発明の一実施例に係る移動体制御システムは、目的地までの移動を制御する目的地移動用制御入力決定部と目的地移動用制御入力決定部に入力された値を修正する制御入力修正部とデッドロックを検知するデッドロック検知部と自己を駆動させる駆動部と、を有する移動体を複数備えた移動体制御システムであって、移動体の各々は回避移動用有限状態遷移モデル動的生成部と出力部とを有し、移動体の制御入力修正部はデッドロック検知部がデッドロックを検知した場合に回避移動が必要と判断して回避移動用有限状態遷移モデル動的生成部に指示し、回避移動用有限状態遷移モデル動的生成部は制御入力修正部から回避移動の指示を受けた場合に自己位置情報と障害物位置情報と他者ロボット位置情報と他者ロボットロック位置情報とに基づき回避移動用有限状態遷移モデルを動的に生成して回避軌道を生成し、出力部は自己の現在位置を示す自己ロボット位置情報と生成した回避軌道上にあって移動体が未通過の位置を自己ロボットロック位置情報として他の移動体に出力する。
【発明の効果】
【0010】
本発明によれば、通信途絶を有限状態遷移モデル上の非決定的遷移として取り扱うことにより、フィールドを共有する各移動体をそれぞれの目的地まで移動させる制御を安全性保証と低コストを両立して実現することが可能になる。
本発明に関連する更なる特徴は、本明細書の記述、添付図面から明らかになるものである。また、上記した以外の課題、構成及び効果は、以下の実施例の説明により明らかにされる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
方向検出器
2か月前
個人
無人作業システム
11日前
ugo株式会社
移動体
2か月前
アズビル株式会社
制御装置
4日前
村田機械株式会社
産業機械
25日前
株式会社ダイヘン
移動体
2か月前
神港テクノス株式会社
制御装置
2か月前
株式会社ダイヘン
移動体
2か月前
トヨタ自動車株式会社
自律移動体
2か月前
トヨタ自動車株式会社
自律移動体
25日前
コフロック株式会社
流量制御装置
5日前
トヨタ自動車株式会社
搬送ロボット
3か月前
株式会社クボタ
作業車
25日前
株式会社丸和製作所
入力機器
4日前
トヨタ自動車株式会社
配送システム
2か月前
株式会社明電舎
車両
25日前
株式会社フジキン
流体制御装置
2か月前
アズビル株式会社
パラメータ調整装置
1か月前
株式会社フジキン
流量制御装置
4日前
トヨタ自動車株式会社
ロボットシステム
1か月前
トヨタ自動車株式会社
位置推定システム
2か月前
株式会社村田製作所
温度補償回路
11日前
株式会社ダイフク
搬送設備
2か月前
トヨタ自動車株式会社
自律移動システム
2か月前
トヨタ自動車株式会社
ロボットシステム
25日前
株式会社ダイフク
搬送設備
12日前
株式会社FUJI
工作機械の操作システム
2か月前
株式会社栗本鐵工所
操作装置
3か月前
ローム株式会社
電源回路
2か月前
株式会社ダイフク
物品搬送設備
2か月前
ローム株式会社
電源回路
1か月前
株式会社ダイフク
物品搬送設備
12日前
株式会社ダイフク
物品搬送設備
12日前
株式会社ダイフク
物品搬送設備
18日前
キヤノン株式会社
情報処理装置
1か月前
ルネサスエレクトロニクス株式会社
半導体装置
5日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ


































